За последние годы в технической литературе неоднократно указывалось на -потребность горной промышленности в регуляторе хода шахтного электрического подъемника, надежно и просто «беспечиваюш,его автоматическое управление шактной подъемной машины с приводом от асинхронного двигателя. Попытки создать такой регулятор хода были. Так фирмой AEQ был созаан электрический регулятор хода, дающий, однако, устойчивое колебание скорости подъемной машины около заданного значения скорости подъема.
Устойчивое колебание скоросги в регуляторе хода AEG получается благодаря промежуточному звену-моторчику в сервомоторе, который вктючает клапан впуска воздуха в цилиндр, но по прошествии некоторого времени с момента начала роста скорости машины; это происходит от того, что моторчик должен передвинуть рейку, дта чего он сам должен несколько десятков раз повернуться, на что однако нужно время. В результате всего этого получается перетормаживание. Оттормаживание также происходит с запаздыванием.
Предметом настоящего изобретения является регулятор хода шахтного
электрического подъемника, использующий ограничитель скорости шахтной подъемной машины по системе AEG.
Описываемый здесь регулятор хода, собственно надстройка, отличается от надстройки фирмы AEG тем, что имеет только цилиндр обратной перестановки с немного измененным поршнем и наличием всего только двух конгактов контакторного типа. Регулятор хода AEG, кроме цилиндра обратной перестановки, имеет большое количество замыкающихся и размыкающихся контакгов трущегося типа, целую систему механических передач и еще один вспомогательный моторчик, которые надстройку AEG делают ненадежной в работе.
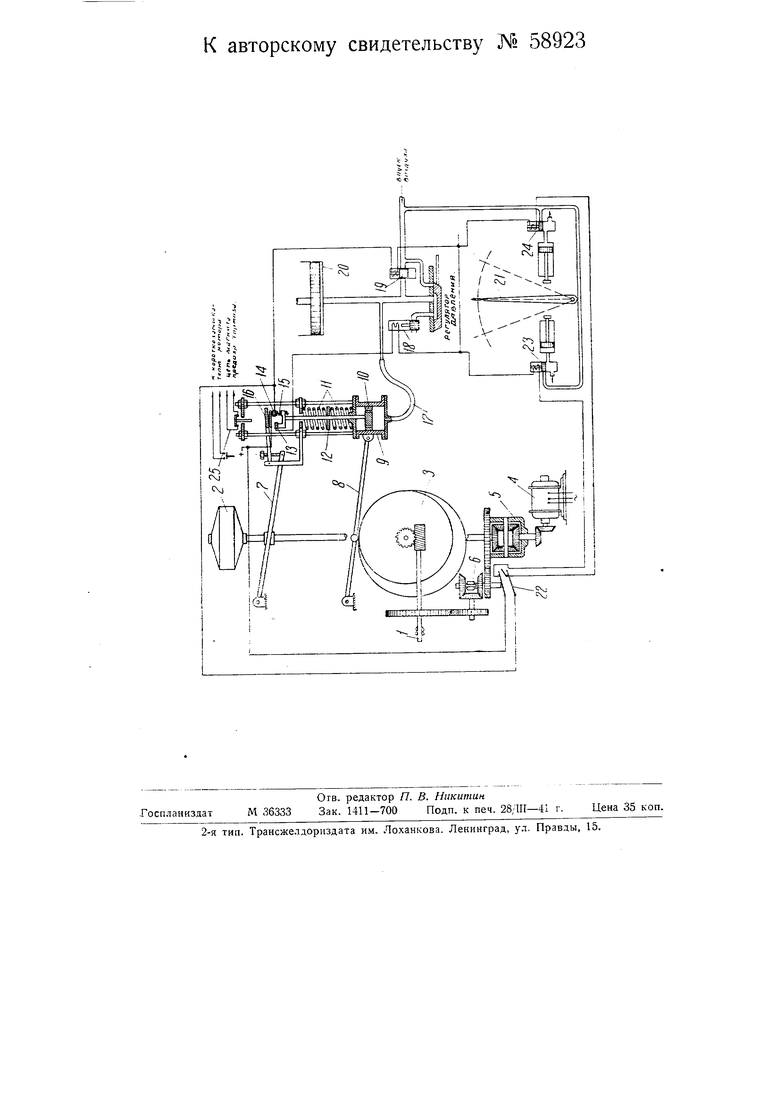
Принцип действия регулятора и его устройство видны из чертежа и заключаются в следующем.
Так же, как и в регулягоре AEG, профилированный диск 3 вращается о г приводного вала 1 указателя глубины. Заданная скорость для каждого положения клети в шахге определяется положением рычага 8, который перемещается диском посредством катящегося ролика. Действительная скоросгь движгния указывается положением муфты центробежного регулятора 2.
Для работы центробежного регулятора все время в чувствительной части вал его непрерывно вращается вспомогательным асинхронным мотором 4 с постоянной скоростью, составляющей оОо/д от нормальной скорости регулятора. Во время работы подъемной машины, когда приводной вал указателя глубины приходит во вращение, центробежный регулятор получает дополнительное число оборотов посредством диференциальной передачи 5. Передаточные отношения рассчитаны таким образом, что число оборотов центробежного регулятора меняется от 500/0 нормального в периоды остановки подъемной машины до lOQ°/o нормального в период максимальной скорости подъема. В этих пределах чувствительность регулятора остается все время очень высокой.
Для того, чтобы и во время обратного хода машинь направление вращения регулятора, связанного с асинхронным мотором, сохраняло прежнее значение, введен специальный реверсивный механизм 6, колеса которого сцепляются между собой в зависимости от направления вращения подъемной мащины таким образом, чтобы направление вращения диференциального привода не менялось.
Благодаря всем этим приспособлениям муфта центробежного регулятора в каждом своем положении указывает с большой точностью действительную скорость подъема. Эта описанная выще часть регулятора AEG здесь остается без изменения.
Для обеспечения работы регулятора по данному изобретению движение муфты передается посредством рычага 7 на контактный рычаг 16. Контактный рычаг 16 (рычаг второго рода) имеет неподвижную точку слева, укрепленную на цилиндре обратной перестановки 9. Контактный рычаг 16 введен для увеличения отклонений между движениями рычагов 7 и 8.
Одновременно с началом подъема приходит в движение профилированный диск 3, который перемещает рычаг 8, а вместе с ним и цилиндр обратной перестановки 9, причем положение последнего будет определяться высотой прилива диска под роликом.
Цилиндр обратной перестановки 9 соединен с цилиндром рабочего тормоза 20 гибким шлангом 17.
Шток порщня 10 имеет, в средней своей части навинченную тарель с контргайкой 12, в которую с обеих сторон упираются пружины 11. На верхней части щток несет два контакта 13 и 14. Контакт 14 имеет некоторое вертикальное перемещение и может подыматься выше уровня контакта 13 пружиной 15.
При недовыполнении или точно.ч соблюдении диаграммы скорости контактный рычаг 16 будет находиться в соприкосновении с обоими контактами 13 и 14, обе катушки клапанов 18 и 19 будут обтекаться током, и нормально открытый выпускной клапан 18 будет открыт, а нормально закрытый 19 будет закрыт. Если скорость подъема превыщает заданную, то вследствие этого правое плечо контактного рычага 16 начнет подыматься относительно цилиндра 9 и выйдет из соприкосновения с контактом 13, катушка клапана 18 обесточится и клапан закроется, изолировав этим цилиндр рабочего тормоза от атмосферы. Контакт 14 при этом будет продолжать двигаться вверх, подпираемый пружиной 15, но если нарушение скорости достигло недопустимой величины, то контакты 14 и 15 тоже разрываются, катущка клапана 19 обесточится и клапан окажется открытым. Воздух ворвется в цилиндр рабочего тормоза 20 и цилиндр обратной перестановки 9. Приток воздуха будет происходить до тех пор, пока в цилиндре обратной перестановки 9 не установится такое давление, которое преодолеет сопротивление пружины 11 и передвинет поршень 10 со штоком вместе с контактами 13, 14 на такую величину, что контакты 14 и 16 опять войдут в соприкосновение, катушка клапана 19 окажется под током и клапан закроется. Но в поршне 10 цилиндра обратной перестановки 9 имеется калиброванное отверстие, через которое разница давлений с течением времени будет уменьшаться, и поршень 10 будет возвращаться в исходное положение.
Если машина не затормозилась, клапан 19 опять обесточится и откроется, но теперь уже клапан 19 окажется под током и будет закрыт только тогда, когда в цилиндре обратной перестановки 9 установится такая разница давлений, которая преодолеет силу пружины и. передвинет поршень 10.
Так будет происходить до тех тюр, лока машина не начнет тормозиться.
Если машина переторможена, то рычаг опустится настолько, что оба клапана 18 и 19 окажутся подтоком, выхлопной клапан 18 будет открыт и воздух будет выходить в атмосферу. Как только в нижней части цилиндра обратной перестановки 9, а следовательно, и в цилиндре рабочего тормоза 20 давление понизится на такую величину, что с оставшимся воздухом в верхней части цилиндра обратной перестановки 9 создастся необходимая разница давлений, поршень 10 будет передвинут вниз, контакты 16 и 13 разорвутся и клапан 18 закроется, но с течением времени разница уничтожится, и процесс, если в нем будет необходимость, начнется сначала..
Так как для хорошей работы регулятора хода нужно, чтобы скорость обратной перестановки в сторону оттормаживания была в два раза быстрее, чем в сторону торможения (см. статью проф. Уманского В. В. „Автоматизация подъема с помощью регулятора хода фирмы AEG - Горный журнал № 4 за 1936 г.), то для выполнения этого условия, кроме общего отверстия, предусмотрено еще одно отверстие с односторонним клапаном, которое расположено, как и общее, в порщне 10 цилиндра обратной перестановки 9.
Торможение машины будет происходить только с заданным замедлением. Если оно будет выше, регулятор хода оттормозит на нужную величину, что произойдет от замыкания контактов 13 и 16.
Если замедление будет ниже заданного, регулятор хода затормозит машину на нужную величину, так как в этом случае произойдет разрыв между контактами 16 и 14.
Дозировка величины давления в цилиндре рабочего тормоза будет происходить прямо пропорционально величине отклонения и при маленьких отклонениях будет увеличивать давление маленькими ступенями.
Таким образом установится определенное тормозное усилие, которое доведет скорость почти до заданной, и если причина, вызвавшая нарушение, не исчезнет, будет держать ее до конца
подъема. Так как при этом будет иметь, место маленькое нарушение скорости. в то время, как поршень 10 цилиндра обратной перестановки 9 перейдет в свое исходное положение и будет поддерживать заданную скорость, то подъемная машина будет превышать скорость на рассчитанную (постоянную) допустимую величину. Рычаг 16 при этом немного приподнят, контакты 16 и 14 замкнуты и оба клапана 18 и 19 закрыты.
Как только появится некоторая ничтожная разность .между действующей и заданной скоростью движения и контактный рычаг 16 будет выведен из соприкосновения с контактом 14, то контакт тотчас же будет восстановлен при помощи впуска воздуха в цилиндр обратной перестановки 9, и регулирование прервется, но оно немедленно снова возобновится, поскольку давление в цилиндре не достигло величины, обеспечивающей требуемое замедление машины. Происходит следующий импульс регулирования и т. д. до тех пор, пока давление не достигнет величины, обеспечивающей относительную устойчивость системы. Процесс закончится, как только давление в цилиндре рабочего тормоза достигнет требуемой величины. Процесс апериодичен, в то время как у существующих регуляторов хода процесс регулирования является процессом колебательным.
Перерегулирования, которые наблюдаются в существующих регуляторах хода, здесь не могут быть, так как здесь прямая и обратная перестановка воплощены в одном механизме, а значит для взаимодействия их ненужно про.межуточного звена (как у AEG), а то время запаздывания, которое необходимо для того, чтобы получить затухающее колебание процесса регулирования, здесь будет как угодно мало.
Рассматривая далее вопрос о регулировании, нужно сказать, что у регулятора хода AEG каждому установившемуся значению разности между действующей и заданной скоростями соответствует определенное устойчивое значение давления в тормозном цилиндре или, что то же, тормозного усилия. Таким образом, для изменения величины тормозного усилия должна измениться разница скоростей, причем величина тормозного усилия пря.го пропорциональна разности.
между заданной и действительной скоростями, в результате чего получается, что колебание фактической скорости вызывает колебание тормозного усилия, а колебание тормозного усилия -колебание скорости.
В предлагаемом регуляторе хода от величины отклонения зависит только величина дозировки тормозного усилия, тогда как абсолютная величина последнего зависит только от величины силы, которую нужно погасить тормозом.
Регулировка здесь происходит при постоянной разнице между заданной и действительной скоростями.
Следует еще отметить, что здесь в прямой перестановке отсутствуют движуихие части, которые в регуляторе хода AEG, благодаря своей инерции, создают перерегулирование.
Одновременно с началом механического торможения рычаг управления 21 посредством клапанов 23 и 24 приходит в свое среднее положение, и подъемный мотор отключается от сети. Переключатель 22 механически связан с реверсивным механизмом 6.
Конструкция клапанов и схема их включения таковы, что торможение производится с обесточенными катушками, что предотвращает от затормаживания мащины при обрыве цепи или подгорании контактов.
При чрезмерно большом нарушении ч:корости рычаг 16 при поднятии вверх разрывает цепь контактов 25 магнита аварийного тормоза, и мащина будет им заторможена. Контакты 25 укреплены к цилиндру обратной перестановки 9 и .движутся вместе с ним.
В данном регуляторе хода величина отклонения фактической скорости от заданной, как и во всяком регуляторе, будет разниться только на величину коэфидиента нечувствительности.
Последний, при малой величине перестановочной силы, потребной для перемещения контакта 16, можно свести до десятых долей процента.
Такое отклонение скоростей бздет. иметь место до самого конца подъема.
Предм.ет изобретения.
1.Регулятор хода шахтных электрических подъемников по системе AEG, отличающийся тем, что, с целью выполнения регулятора изодромным и устранения из него контактной коробки, последняя заменена поршневым цилиндром обратной перестановки 9, который соединен воздухопроводом с цилиндром рабочего тормоза и имеет на конце щтока поршня два электрических контакта 13 и 14 (из которых контакт 14 является пружинным) для замыкания, посредством связанного с центробежным регулятором контактного рычага 16, цепей электромагнитных клапанов 18 и 19 регулятора давления таким образом, чтобы при появлении разности между действующей и заданной скоростями движения, периодически регулировался впуск воздуха в цилиндр рабочего тормоза и цилиндр обратной перестановки до тех пор, пока действующая и заданная скорости движения не уравняются.
2.В регуляторе по п. 1 применение добавочного отверстия с односторонним клапаном в поршне цилиндра обратной перестановки с той целью, чтобы скорость обратной перестановки в сторону оттормаживания была больше, чем в сторону торможения.
3.В регуляторе по п. 1 применение контакта 25, взаимодействующего с рычагом центробежного регулятора и служащего для размыкания цепи электрического аварийного тормоза в случае чрезмерного нарушения скорости подъема.
J|A
/
Г/


| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежно-инерционный регулятор хода шахтных подъемных машин | 1948 |
|
SU79137A1 |
| РЕГУЛЯТОР СКОРОСТИ ПОДЪЕМНЫХ МАШИН | 1941 |
|
SU67427A1 |
| РЕГУЛИРУЕМЫЙ ПРИВОД ТОРМОЗА ШАХТНЫХ ПОДЪЕМНЫХ МАШИН | 1968 |
|
SU211769A1 |
| Устройство для уравновешивания шахтных опрокидных скипов клетей | 1937 |
|
SU54387A1 |
| Устройство для дистанционного (на расстоянии) управления буровым станком | 1933 |
|
SU43850A1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ ПОЕЗДОВ И ОТДЕЛЬНЫХ ПОВОЗОК | 1926 |
|
SU8835A1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ ПОЕЗДОВ И ОТДЕЛЬНЫХ ПОВОЗОК | 1925 |
|
SU7853A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для стабилизации зазора в тормозных системах транспортных средств | 1983 |
|
SU1160155A1 |
| Устройство управления тормозом подъемной машины | 1989 |
|
SU1662919A1 |