Изобретение относится к области машиностроения.
Известна система управления дистанционным копирующим манипулятором, обладающая свойством активного отрал ения усилия нагрузки на задающий орган и содержащая исполнительную следящую систему, вьшолнеиную в виде последовательно соединенных усилителя, исполнительного элемента и исполнительного органа, соединенного с нагрузкой, датчиком нагрузки и датчиком положения, выход которого подключен к одному из входов усилителя, и систему воспроизведения усилия нагрузки на задающем органе, выполненную в виде последовательно соединенных усилителя, исполнительного элемента и механической передачи, соединенной с задающим органом, датчиком нагрузки и датчиком ноложения, выход которого подключен к другому входу усилителя иснолнительной следящей системы, причем в систему унраилеиия введен нереключатель режимов работы, в одном положении которого сигнал датчика нагрузки исполнительной системы су.ммируется с сигналом датчика нагрузки системы, а в другом ноложении - сигнал датчика нагрузки иснолнительной системы поступает в качестве нанряжения, опорного для прохождения сигнала датчика нагрузки задающей стороны на логическое устройство.
Однако наличие в логическом устройстве больщого числа резисторов и диодов усложняет систему управления и уменьщает ее надежность.
С целью упрощения и новыщения надежности в предлагаемой системе логическое устройство выполнено в виде диодного моста, углы одной диагонали которого подключены через контакты переключателя режимов работы к
выходу датчика нагрузки иснолнительной системы и через входное сопротивление усилителя к выходу датчика нагрузки задающей системы, а концы другой диагонали через резистор соединены с общей шиной датчиков нагрузки.
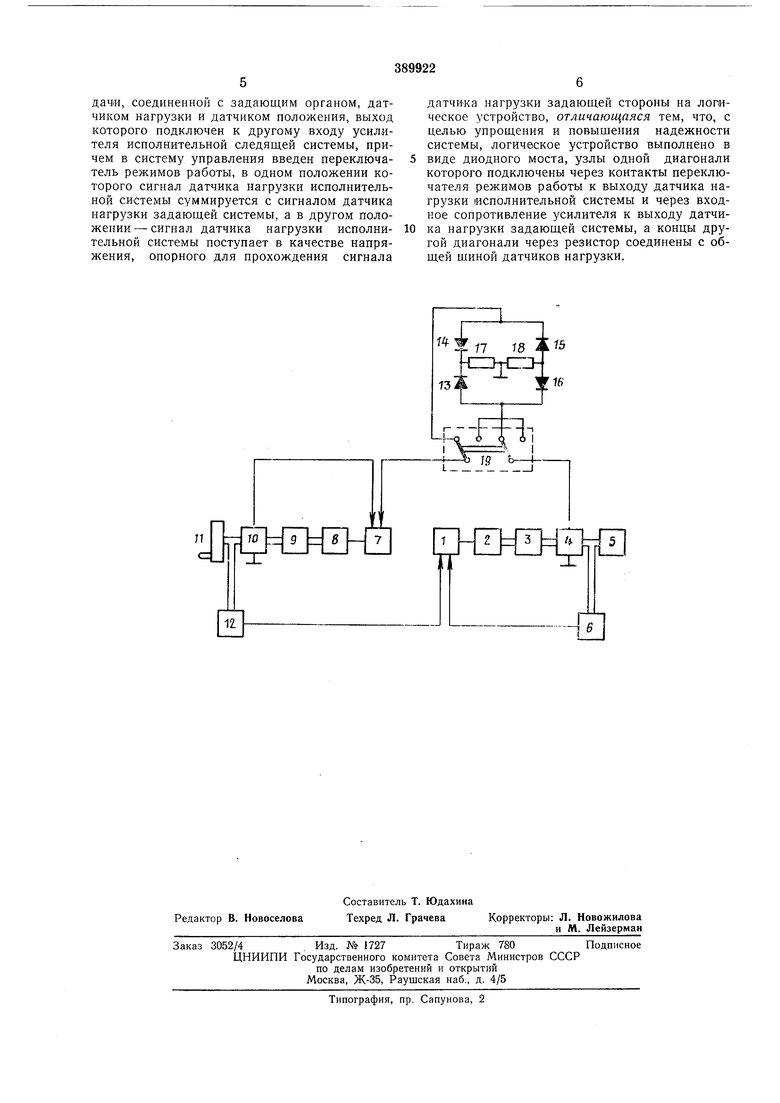
На чертеже изображена схема системы управления .манипулятором.
Система содержит следующие функциональные элементы: исполнительную следящую систему, содержащую усилитель /, исполнительный элемент 2 и иснолнительный орган 3, соединенный через датчик 4 нагрузки нсполнительной системы с нагрузкой 5 и лгатчиком 6 ноложения, выход которого подключен к одному из входов усилителя /; систему воспроизведения усилителя нагрузки, содержащую усилитель 7, исполнительный элемент 8 с необратимой механической передачей Я соединенной через датчик 10 нагрузки задающей системы с задающим органом // и датчиком 12
положения, выход которого подключен к другому входу усилителя 7; логическое устройство, содержащее диоды 13-16, образующие диодный мост, подключенный плоюсовым и минусовым узлами диагонали соответственно через резисторы 17 -щ 18 к общей шине датчиков нагрузки; переключатель 19 режимов работы с двумя группами переключающих контактов, имеющих следующие подключения: средние контакты подключены к датчику 4 нагрузки исполнительной системы и через входное сопротивление к датчику 10 нагрузки задающей системы, нормально замкнутые контакты подключены к входам логического устройства и нормально разомкнутые контакты соединены между собой.
Предлагаемая система может работать в двух режимах: в первом режиме, когда сигнал датчика нагрузки исполнительной системы 4 .- -поступает через контакты переключателя 19 на логическое устройство и создает на резисторах 17 и 18 опорное напряжение для прохождения сигнала датчика нагрузки задающей системы 10; во втором режиме, когда сигнал датчика 4 нагрузки исполнительной системы через контакты переключателя 19 суммируется с сигналом датчика нагрузки задающей системы на входном сопротивлении усилителя 7.
Работа системы в первом режиме происходит следующим образом.
На исполнительном органе действует нагрузка 5. Сигнал датчика 4, измеряющего величину этой нагрузки, поступает через контакты переключателя 19 на вход логического устройства и в зависимости от полярности создает опорное напряжение па каком-нибудь одном резисторе.
Полярности сигналов датчиков нагрузки 4 и 10 находятся в таком состоянии, что если оператор создает усилие, направленное в сторону действия нагрузки, то сигнал датчика 4 поступает на диод, на котором нет опорного напряжения, если же оператор создает усилие противоположного направления, то сигнал датчика 4 поступает на диод, на котором есть опорное напряжение.
Если оператор не создает усилия на задающем органе, тогда последний неподвижен, так как сигнал датчика 10 нагрузки равен нулю, а сигнал датчика 4 в данном положении переключателя не поступает па вход усилителя 7 задающей системы. Вследствие неподвижности задающего органа исполнительный орган также находится в покое, удерживая груз.
Таким образом, оператор может удерживать груз, не создавая при этом усилия.
Если оператор прикладывает незначительное усилие, направленное в сторону действия нагрузки, тогда сигнал датчика 10, измеряющего это усилие, проходит через входное сопротивление усилителя 7, контакты переключателя 19, диод 15 и резистор 18. При этом на входном сопротивлении усилителя 7 создается падение напряжения, которое инициирует систему воспроизведения усилителя пагрузки. Система поворачивает необратимую со стороны оператора механическую передачу, прииодя и движение задающий орган в направлении действия силы оператора.
При движении задающего органа происходит движение исполнительного органа в сторону груза, при этом оператор этот груз не ощущает. Ьсли оператор прикладывает усилие, направленное против действия нагрузки, то сигнал датчика 10, измеряющего это усилие, поступает через входное сопротивление усилителя 7 и контакты переключателя W на катод диода 14, имеющий на аноде подпорное напряжение, равное падению напряжения на резисторе ii, от прохождения сигнала датчика 4 нагрузки.
Если усилие оператора по абсолютной величине не превышает усилия, создаваемого нагрузкой, сигнал датчика 10 не создает падения напряжения на входном сопротивлении усилителя 7, так как диод 14 заперт. Движения нет. Нсли усилие оператора незначительно превышает усилие нагрузки, на входном сопрохивлении усилителя создается падение напряжения от прохождения разности сигналов датчиков 10 и 4, которое поступает на систему воспроизведения усилия нагрузки. Система поворачивает необратимую со стороны оператора
механическую передачу, приводя в движение задающий орган в направлении действия силы оператора.
При движении задающего органа происходит движение исполнительного органа в сторону подъема груза, причем оператор ощущает вес этого груза.
Работа системы во втором режиме происходит следующим образом. При создании нагрузкой на исполнительном
органе некоторого усилия величина нагрузки измеряется датчиком 4, сигнал которого поступает через контакты переключателя 19 на вход системы воспроизведения усилия нагрузки, замкнутой отрицательной обратной связью
по усилию на задающем органе // при помощи датчика 10 нагрузки. Тогда при наличии усилия на исполнительном органе на выходе системы воспроизведения усилия нагрузки, т. е. на задающем органе, также создается усилие.
Предмет изобретения
Система управления дистанционным копирующим манипулятором, содержащая исполнительную следящую систему, выполненную в виде последовательно соединенных усилителя, исполнительного элемента и исполнительного органа, соединенного с нагрузкой, датчиком нагрузки и датчиком положения, выход которого подключеп к одному из входов усилителя, и систему воспроизведения усилия нагрузки на задающем органе, вынолненную в виде последовательно соединенных усилителя, исполнительного элемента и механической передачи, соединенной с задающим органом, датчиком нагрузки и датчиком положения, выход которого подключен к другому входу усилителя исполнительной следящей системы, причем в систему управления введен переключатель режимов работы, в одном положении которого сигнал датчика нагрузки исполнительной системы суммируется с сигналом датчика нагрузки задающей системы, а в другом положении- сигнал датчика нагрузки исполнительной системы поступает в качестве напряжения, опорного для прохождения сигнала
датчика нагрузки задающей стороны на логическое устройство, отличающаяся тем, что, с целью упрощения и повышения надежности системы, логическое устройство выполнено в виде диодного моста, узлы одной диагонали которого подключены через контакты переключателя режимов работы к выходу датчика нагрузки исполнительной системы и через входное сопротивление усилителя к выходу датчика нагрузки задающей системы, а концы другой диагонали через резистор соединены с общей шиной датчиков нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ | 1973 |
|
SU368020A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| УСТАНОВКА для НАГРУЖЕНИЯ КОНСТРУКЦИЙ ПРИ ИСПЫТАНИИ НА УСТАЛОСТЬ | 1973 |
|
SU388203A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| СПОРТИВНЫЙ ТРЕНАЖЕР | 1994 |
|
RU2128072C1 |
| Система управления регулирующим органом | 1981 |
|
SU1004963A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Автоматическое устройство управления бурового станка | 1980 |
|
SU909139A2 |
| Обратимая следящая система управления манипулятором | 1978 |
|
SU748342A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
16
