1
Изобретение относится к автоматике.
Известная система управления дистанционным колирующим манипулятором, содержаш.ая датчики нагрузки, установленные на задающем и исполнительном органах манипулятора, исполнительную следящую систему, управляющую положением исполнительного органа, и замкнутую по усилию систему воспроизведения усилия нагрузки на задающем органе.
На вход системы воспроизведения усилия нагрузки пступает сигнал непосредственно с датчика нагрузки, установленного на исполнительном органе, а механическая передача между задающим органом и исполнительным элементом системы воспроизведения усилия является необратимой со стороны оператора.
Предлагаемая система отличается тем, что дополнительно содержит два ограничителя, например, диодных, точки подключения опорных напряжений которых соединены через диоды с датчиком нагрузки исполнительной следящей системы, причем входы ограничителей соединены через диоды с датчиком нагрузки системы воспроизведения усилия нагруаки, а выходы подключены к усилителю системы воспроизведения усилия нагрузки.
Система содержит переключатель режимов работы, соединенный с датчиком нагрузки исполнительной следящей системы, нормальнозамкнутые контакты которого включены в цепь опорного напряжения ограничителей, нормально-разомкнутые - подключены к усилителю системы воспроизведения усилия нагрузки.
Это позволяет облегчить эксплуатацию системы благодаря тому, что усилие нагруЗКИ при движении исполнительного органа в сторону ее действия не воспроизводится на задающем органе и манипулятор не движется под действием нагрузки, а также расширить область применения вследствие того, что задающий орган на руке оператора может полностью воспроизводить усилие нагрузки.
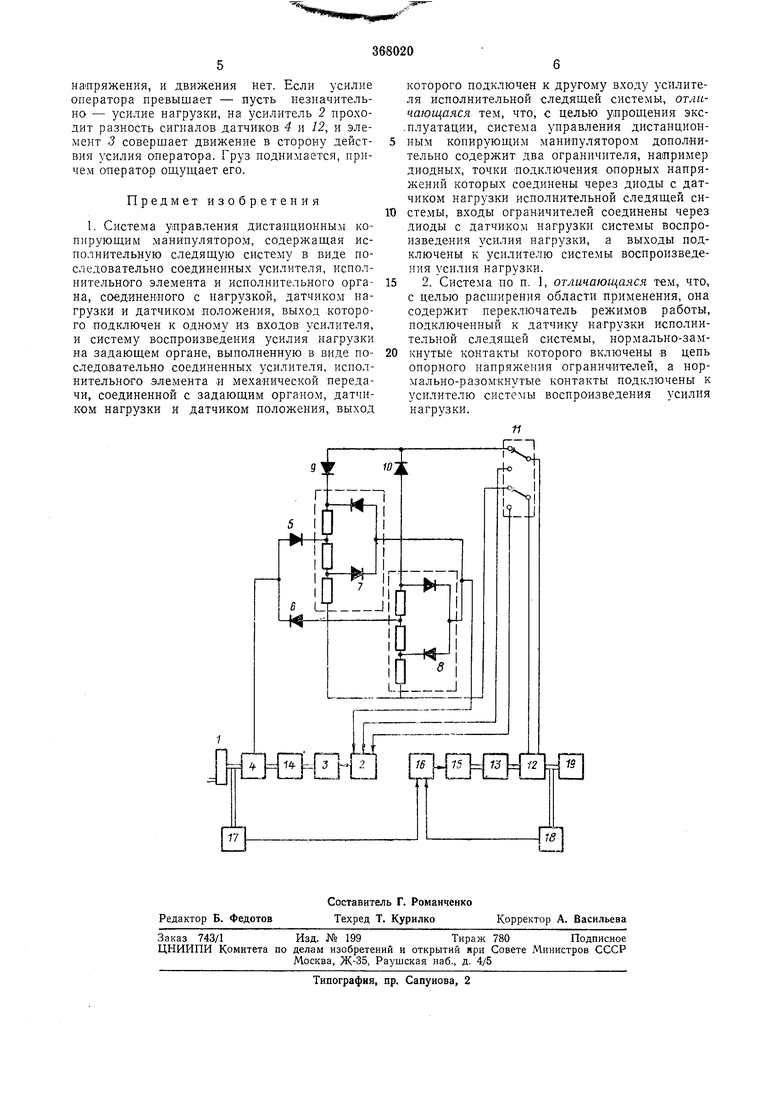
Схема системы управления манипулятором изображена на чертеже.
Задающий орган / приводится в движение системой воспроизведения зсилий нагрузки,
содержащей усилитель 2 и исполнительный элемент 3, установленный на задающем органе датчик нагрузки 4, сигнал которого подается на два диода 5 и 6 с объединенными разноименными электродами. Два
диодных ограничителя 7 и 8 включены последовательно с каждым из диодов 5 и 6, так, что образуются две параллельные цепи, содержащие по однму диоду и диодному ограничителю (выходы ограничителе объединены
и подключены к суммирующему устройству
усилителя 2). Диоды 9 и 10 включены последовательно с резисторами каждого диодного ограничителя. Переключатель режимов работы 11 включен в цепь сигнала датчика нагрузки 12, установленного на исполнительном органе 13 (в одном положении переключателя сигнал поступает непосредственно на суммирующее устройство усилителя 2, г ъ другом - через две параллельно соединенные электрические цепи, каждая из которых состоит из последовательно соединенных резисторов, диодных ограничителей 7 и S и диодов 9 и 10). Между задающим органом и исполнительным элементом системы воспроизведения усилия нагрузки расположена необратимая механическая передача 14. Положением исполнительного органа управляет исполнительная следящая система, содержащая исполнительный элемент 15 и усилитель 16 на суммирующее устройство которого подаются сигналы с датчиков положения 17 и 18, установленных на задающем и исполнительном органах соответственно.
Данная система может работать в двух режимах: 1) сигнал датчика нагрузки 12 поступает через переключатель 11 непосредственно на суммирующее устройство усилителя 2 и в системе обеспечивается нолное воспроизведение усилия нагрузки задающим органом на руке оператора; 2) сигнал датчика подается как опорное напряжение на диодные ограничители 7, 8, усилие нагрузки воспроизводится частично.
В первом режиме система работает следующим образом. Пусть нагрузка 19 создает на исполнительном органе некоторое усилие. Величина нагрузки измеряется датчиком 12, сигнал которого поступает на вход системы, замкнутой отрицательной обратной связью по усилию на задающем органе при помощи датчика нагрузки 4 и элементов отрицательной обратной связи 5-8. Если сигнал датчика 4 положителен, он проходит через диод 5 и диодный ограничитель 7 без искажений, поскольку опорное напряжение на ограничителе отсутствует. По той же причине отрицательный сигнал проходит без искажения через диод 6 и диодный ограничитель 8. В результате при наличии усилия на исполнительном органе на выходе системы воспроизведения усилия нагрузки, т. е. на задающем органе, также создается усилие. Под действием этого усилия задающий орган может придти в движение (если оператор не создает достаточного противодействующего усилия, чтобы остановить это движение или направить его в противоположную сторону), меняя свое положение, которое отслеживается исполнительной следящей системой, замкнутой отрицательной обратной связью по положению исполнительного органа. В этом случае оператор опускает груз. Если оператор увеличит противодействующее усилие, движение может прекратиться, а затем может измениться его направление. В этом случае груз поднимается. Усилие,
создаваемое оператором, само по себе не молсет вызвать движения задающего органа в
силу необратимости механической передачи
14, но сигнал датчика нагрузки 4, измеряющий величину усилия оператора, поступая на
исполнительный элемент 3 через обратную
связь и через усилитель 2, вызывает движение
этого исполнительного элемента в сторону
действия усилия оператора. Исполнительный
элемент оттормаживает необратимую механическую передачу 14, давая задающему органу возможность соверщать движение в нанравлении действия усилия оператора. Движение задающего органа отслеживается исполнительным органом, в результате чего груз поднимается.
Во втором режиме сигнал датчика 12, измеряющего величину нагрузки, не поступает на вход системы воспроизведения усилия и, следовательно, не может вызвать движения задающего органа. В зависимости от знака сигнал может создать опорное напрял ение только на каком-нибудь одном диодном ограничителе. Допустим, что он через диод 9 поступает в качестве опорного напряжения на ограничитель 7. Полярности сигналов датчиков нагрузки 4 Е 12 таковы, что, если оператор создает усилие, направленное в сторону действия нагрузки, сигнал датчика 4 поступает
на диодный ограничитель, на котором нет опорного напряжения; если же оператор создает усилие противоположного направления, сигнал поступает на диодный ограничитель, на котором опорное напряжение есть. Если
оператор не создает усилия на задающем органе, последний неподвижен, так как сигнал датчика 4 равен нулю, а сигнал датчика 12 не поступает на вход системы восроизведения усилпя. Вследствие неподвижности задающего органа исполнительный орган также находится в положении равновесия, удерживая груз.
Таким образом, оператор может удерживать груз, не создавая при этом усилия. Если
он прикладывает незначительное усилие, направленное в сторону действия нагрузки, сигнал датчика 4, измеряющего это усилие, поступает через диод 6 на диодный ограничитель 8, на котором нет опорного напряжения.
Сигнал, пройдя через ограничитель 8 без искажений, поступает на вход усилителя 2 и инициирует исполнительный элемент 3, который движется в направлении действия усилия оператора, приводя в движение задающий
орган. Груз опускается, чего оператор не ощущает. Когда оператор прикладывает усилие, направленное против действия нагрузки, сигнал датчика 4, из.меряющего это усилие, поступает через диод 5 на диодный ограничитель 7, на котором есть опорное напряжение, создаваемое датчиком нагрузки 12. Если усилие оператора по абсолютной величине не превышает усилия, создаваемого нагрузкой, сигнал датчика 4 не проходит на усилитель 2,
так как его величина не превышает опорного
напряжения, и движения нет. Если усилие оператора превышает - пусть незначительно - усилие нагрузки, на усилитель 2 проходит разность сигналов датчиков 4 и /2, и элемент 3 совершает движение в сторону действия усилия оператора. Груз поднимается, причем оператОр ощуш.ает его.
Предмет изобретения
1. Система управления дистанционным копируюшим манипулятором, содержащая исполнительную следяшую систему в виде последовательно соединенных усилителя, исполнительного элемента и исполнительного органа, соединениого с нагрузкой, датчиком нагрузки и датчиком положения, выход которого подключен к одному из входов усилителя, и систему воспроизведения усилия нагрузки на задаюшем органе, выполненную в виде последовательно соединенных усилителя, исполнительного элемента и механической передачи, соединенной с задаюш,им органом, датчиком нагрузки и датчиком положения, выход
которого подключен к другому входу усилителя исполнительной следящей системы, отличающаяся тем, что, с целью упрощения экс.плуатацяи, система управления дистанционным копирующим манипулятором дополнительно содержит два ограничителя, например диодных, точки подключения опорных напряжений которых соединены через диоды с датчиком нагрузки исполнительной следящей системы, входы ограничителей соединены через диоды с датчиком нагрузки системы воспроизведения усилия нагрузки, а выходы подключены к усилителю системы воспроизведения усилия нагрузки.
2. Система по и. 1, отличающаяся тем, что, с целью расширения области применения, она содержит переключатель режимов работы, подключенный к датчику нагрузки исполнительной следящей системы, нормально-замкнутые контакты которого включены в цепь опорного напряжения ограничителей, а нормально-разомкнутые контакты подключены к усилителю системы воспроизведения усилия нагрузки.
п
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯт:^птшггшйЧЕв||АвторыI ;высшее техническое училище им. Н. Э. Баумана | 1973 |
|
SU389922A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Система управления очувствленным копирующим манипулятором | 1978 |
|
SU771609A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| ДИСТАНЦИОННЫЙ КОПИРУЮЩИЙ МАНИПУЛЯТОР | 1970 |
|
SU275680A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ОТРАЖЕНИЕМ УСИЛИЯ | 1971 |
|
SU317039A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 1973 |
|
SU398386A1 |
