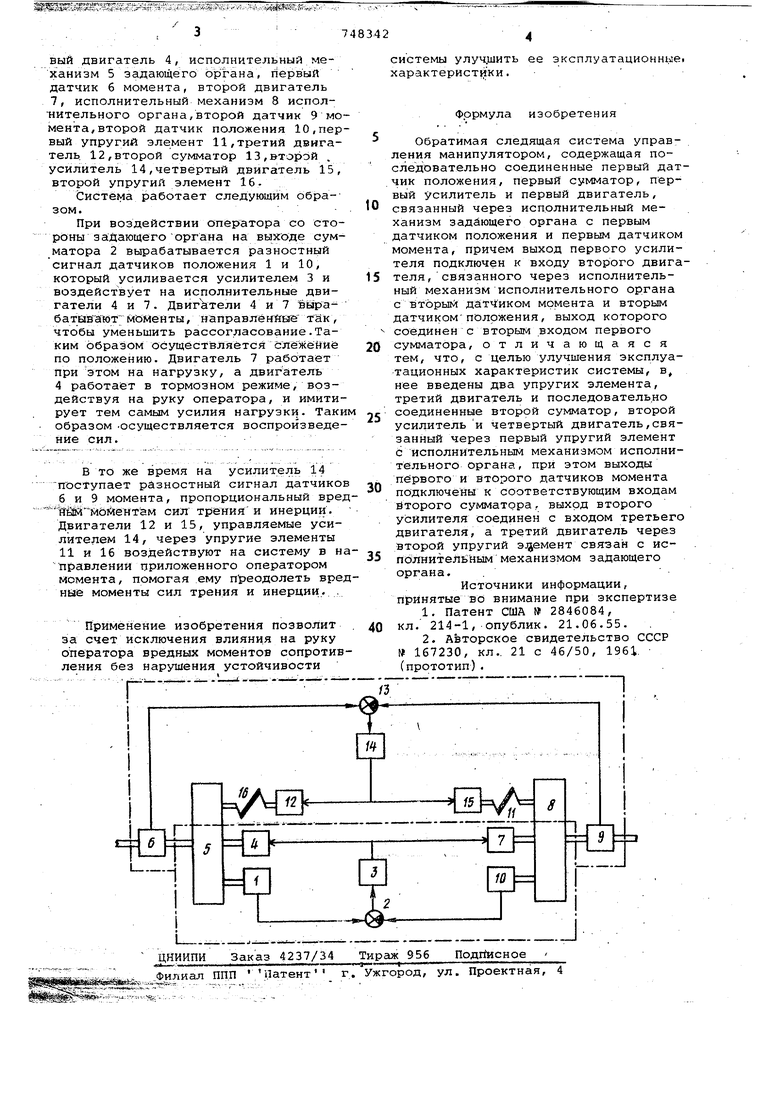
1 . i Изобретение может быть использовано в копирующих манипуляторах, обеспечивающих дистанционное выполнение работ. Известная обратимая следящая система управления манипулятором, содержащая исполнительные механизмы задающего и исполнительного органов датчики по.ложения, датчики момента, усилители и привода, не исключает влияний вредных моментов на руку опе ратора ПЗ. Наиболее близким техническим реше нием к изобретению является система, .содержащая последовательно соединенные первый датчик положения, первый сумматор, первый усилитель и первый двигатель, связанный через исполнительный механизм задающего органа с первым датчиком положения и первым датчиком момента, причем выход первого усилителя подключен к .входу дви гателя, связанного через исполнительный механизм исполнительного органа с вторым датчиком момента н вто рым датчиком положения, выход которого соединен с вторым входом перво.го сумматора С 2. . , Недостатком такой системы является неудовлетворительная степень компенсации вредных моментов сопротивления движению при устойчивой работе манипулятора. При увеличении коэффициента усиления канала компенсации система становится колебательной и можей выйти из устойчивого состояния. Цель изобретения -i улучшение эксплуатационных характеристик системы. Сущность изобретения заключается в том, что сисхёма содержит связанный через второй упругий элемент с исполнительным механизмом задающего органа третий двигатель и последовательно соединенные второй сумматор, второй усилитель и четвертый двигатель , связанный через первый упругий Гэлемент с испо.лнительным механизмом .исполнительного органа,при этом выходы первого и второго датчиков момента подключены к соответствующим входам второго сумматора, а выход второго усилителя соединен с входом третьеГО двигателя. На чертеже представлена функциональная схбма системы, которая содержит первый датчик положения 1, первый сумматор 2, первый усилитель 3,первый двигатель 4, исполнительный механизм 5 задающего , первый датчик 6 момента, второй двигатель 7, исполнительный механизм 8 исполнительного органа/второй датчик 9 момента, второй датчик положения 10,первый упругий элемент 11,третий двигатель. 12, второй сумматор 13,второй усилитель 14,четвертый двигатель 15, второй упругий элемент 16Система работает следующим обра-зом.
При воздействии оператора со стороны задающего органа на выходе сумматора 2 вырабатывается разностный сигнал датчиков положения 1 и 10, который усиливается усилителем 3 и воздействует на исполнительные двигатели 4 и 7. Двигйтели 4 и 7 твырабатав а от моменты, направленные так , чтобы уменьшить рассогласование.Таким образом осуществляется слёжё нИё по положению. Двигатель 7 работает при этом на нагрузку, а двигатель 4 работает в тормозном режиме, воздействуя на руку оператора, и имитирует тем самым усилия нагрузки. Таки образом Осуществляется воспроизведение сил.
В то же время на усилитель 14 пъсТупает разностный сигнал датчиков б и 9 момента, пропорциональный вредйгйй йойентам сил трения и инерции. Двигатели 12 и 15, управляемые усилителем 14, через упругие элементы 11 и 16 воздействуют на систему в направлении приложенного оператором момента, помогая ему преодолеть вредные моменты сил трения и инерции.
Применение изобретения позволит за счет исключения влияния на руку оператора вредных моментов сопротивления без нарушения устойчивости
системы улуч.шить ее эксплуатационные. характеристики.
Формула изобретения
Обратимая следящая система управления манипулятором, содержащая последовательно соединенные первый датчик положения, первый сумматор, первый Усилитель и первый двигатель, связанный через исполнительный механизм задающего органа с первым датчиком положения и первым датчиком момента, причем выход первого усилителя подключен к входу второго двигателя, связанного через исполнительный механизм исполнительного органа с вторые датчиком момента и вторым датчикомположения, выход которого соединен с вторым входом первого сумматора, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик системы, в, нее введены два упругих элемента, третий двигатель и последовательно соединенные второй сумматор, второй усилитель и четвертый двигатель,связанный через первый упругий элемент 6 исполнительным механизмом исполнительного органа, при этом выходы первого и второго датчиков момента подключены к соответствующим входам йторого сумматора, выход второго усилителя соединен с входом третьего двигателя, а третий двигатель через /второй упругий элемент связан с исполнитеЛКным механизмом задающего органа.
Источники информации. Принятые во внимание при экспертизе
1.Патент США 2846084, кл. 214-1, опублик. 21.06.55.
2.Авторское свидетельство СССР 167230, кл.. 21 с 46/50, 1961. (прототип).
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Дистанционный копирующий манипулятор | 1976 |
|
SU590136A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
