i;
Устройство относится к системам управления с использованием модели нагрузки для отражения усилий на управляющем органе.
Известен дистанционный манипулятор, содержащий задающий орган, связанный системой управления по положению с истюлнительным органом и его физической моделью, датчики нагрузки которых подключены через систему В01Спроиз1ве|Дения яагрузки К задающему органу. Сигналы датчиков нагрузки физической модели исполнительного органа не компенсируют составляющую от трения в сигналах датчиков нагрузки исполнительного органа, что ограничивает точность воспроизведейий нагрузки.
Известная система управления содержит последовательно соединенные датчик угла, следящий привод по углу, датчик нагрузки, следящий привод по нагрузке, выход которого совместно с входом датчика угла соединен с рукояткой оператора. Она не позволяет осуществить, точное воспроизведение нагрузки вследствие влияния сухого трения в приводе исполнительного органа.
Предлагаемое устройство отличается тем, что в нем для повышения точности воспроизведения нагрузки установлены блоки определения знака скорости, подсоединенные к датчику угла и выходу следящего привода по углу, и подключеииый к выходам этих блоков
и выходу датчика нагрузки блок компенсации трения, выход которого соединен с входом следящего привода по нагрузке. Для повышения помехозащищенности устройства блок
определения знака скорости содержит блок вычитания и. подключенный к его входу блок задержки, выход которого соединен с вторым входом блока вычитания.
Блок-схема устройства представлена на
чертеже.
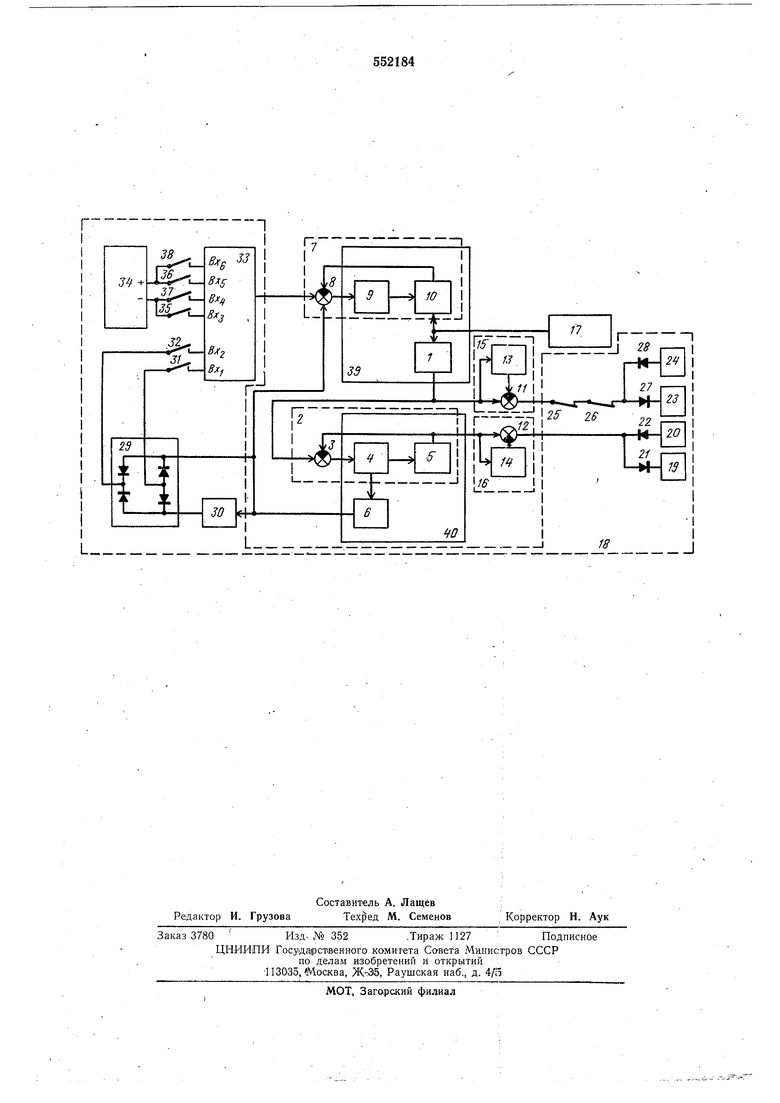
Она содержит датчик 1 угла, следящий привод 2 по углу, состоящий из измерителя 3 рассогласования угла, электрогидропривода 4 и датчика 5 обратной,связи по углу, датчик 6
нагрузки, следящий привод 7 по нагрузке, состоящий из измерителя 8 рассогласования нагрузки, привода 9 отражения и датчика 10 обратной связи по нагрузке, блоки 11 и 12 вычитания, блоки 13 и 14 задержки, входящие
в блоки 15 и 16 определения знака скорости, рукоятку 17 оператора, блок-18 компенсации трения, выполненный из реле 19 и 20, диодов 21 и 22, реле 23 и 24, размыкающих контактов 25 и 26 реле 19 и 20, диодов 27 и 28,
диодного моста 29, инвертора 30, замыкЗющих контактов 31 и 32 реле 19 и 20, сумматора 33, источник 34 питания. В состав блока 18 компенсации трения входят размыкающие контакты 35, 36, 37, 38 реле 19, 20, 23 и 24 соответственно, в состав задающего органа 39 -
привод 9 отражения, датчик 10 обратной связи по нагрузке и датчик 1 угла, а в состав исполнительного органа 40 - электрогидрогфивод 4, датчик 5 обратной связи по углу и датчик 6 нагрузки.
Устройство работает следующим образом.
Оператор через рукоятку 17 воздействует на задающий орган 39 и изменяет его положение относительно опоры. Датчик 1 угла при этом выдает управляющий сигнал, пропорциональный Зтлу задающего органа, на измеритель 3 рассогласования угла следящего при1юда 2 по углу. В полостях силовых цилиндров электрогидропривода 4 возникает перепад давлений, перемещающий звено исполнительного органа 40 в нужном направлении до тех пор, пока сигнал с датчика 5 обратной связи по углу в измерителе 3 рассогласования не сравняется с сигналом датчика 1 угла. Перепад давлений измеряется датчиком 6 нагрузки и пропорционален приложенной к исполнительному органу нагрузке (как полезной, так и от трения). Сигнал с датчика 6 нагрузки поступает на измеритель 8 рассогласования нагрузки следящего привода 7 по нагрузке. Привод 9 отражения отрабатывает входной сигнал до тех пор, пока сигнал с датчнка 10 обратной связи по нагрузке ле сравняется в измерителе 8 рассогласования с входным сигналом. При этом оператор на рукоятке 17 испытывает отраженную нагрузку, пропорциональную нагрузке электрогидроиривода 4. Сигналы с датчика 1 угла и датчика 5 обратной связи по углу задерживаются в блоках 13 и 14 и сравниваются в блоках И и 12 вычитания с текущим значением сигнала, таким образом. На выходах блоков 15 и 16 определения знака скорости непрерывно вырабатываются сигналы, знаки которых соответствуют определенным направлениям скорости изменения углов исполнительного и задающего органов. В зависимости от здака скорости исполнительного органа 40 срабатывают через диоды 21 или 22 реле 19 или 20 и подключают на входы Bxi, или Вха сумматора 33 через контакты 31 или 32 напряжение сигнала компенсации нужного знака, получаемое с выходов диодного моста 29, входы которого занитаны прямым и инвертированным напряжением датчика . 6 нагрузки. Инвертор 30 и диодный мост 29 подготовливают на входах сумматора 33 напряжение компенсации нужного знака независимо от знака отраженного сигнала с датчика нагрузки. Таким образом, с помощью соответствующего, коэффициента усиления, установленного по входам ВХ| и Вхг в сумматоре 33, на вход измерителя 8 рассогласования поступает сигнал компенсации, соответствующий составляющей силы трения, пропорциональной нагрузке. Одновременно через контакты 35 и 36 тех же реле с источника 34 двухнолярного напряжения на входы Вхз или Вхз сумматора 33 подаются сигналы компенсации, соответствующие, постоянно.й составляющей трения движения.
Трение в исполнительном органе, несмотря на его неподвижность, оказывает влияние на величину отраженного сигнала, уменьщая его модуль, т. е. фактически нагрузка оказывается больше, чем в сигнале отражения. Этот фактор учитывается тем, что при неподвижном исполиительном и движущемся задающем органах в .зависимости от знака скорости последнего срабатывает реле 23 или 24 и через контакты 37 или 38 на входы Вх4 или Bxj сумматора 33 с соответствующим коэффициеитом передачи поступает постоянное напряжение с источника 34 двухнолярного напряжения и далее на измеритель 8 рассогласования нагрузки. Таким образом, обеспечивается подача сигнала компенсации, соответствующего постоянной составляющей трения нокоя состава исполнительного органа. Все это обеспечивает подачу на вход приъода 9, отражения «чистого сигнала полезной нагрузки, его отражение на рукоятке оператора и позволяет увеличить точность манипулировайия.
Физико-механическое моделирование показало, что нр«менение изобретения в одном из манипуляторов повыщает точность воспроизведения нагрузки на 7-10%, что позволяет манипулировать более хрупкими предметами и повысить производительность маиинулятора.
Формула изобретения
1. Устройство для управления манинулятором, содержащее последовательно соединенные датчик угла, следящий привод по углу, датчик н агрузки, следящий привод по нагрузке, выход которого совместно с входом датчика угла соединен с рукояткой онератора,
отличающееся тем, что, с целью повышения точности воспроизведения нагрузки на рукоятке онератора, в нем установлены блоки определения знака скорости, нодсоединенные к датчику угла и выходу следящего привода
по углу, и подключенный к выходам этих блоков и выходу датчика нагрузки блок компенсацни трения, выход которого соединен с входом следящего нривода но нагрузке. 2. Устройство по п. 1, отличающееся
тем, что, с целью повышения помехозащищенности устройства, блок определения знака скорости содержит блок вычитания и подключенный к его входу блок задержки, выход которого соединен с вторым входом блока вычитания.
Г
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Обратимая следящая система | 1983 |
|
SU1176301A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Система автоматического регули-РОВАНия уРОВНя МЕТАллА B КРиСТАлли-зАТОРЕ | 1979 |
|
SU839669A1 |
| Следящая система | 1985 |
|
SU1368855A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |