(54) ИНТЕРАКТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ РОВОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления обкаткой двигателя внутреннего сгорания на испытательном стенде | 1983 |
|
SU1125398A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА СТРОИТЕЛЬНОЙ МАШИНЫ С ГИДРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2340732C2 |
| Устройство для регулирования натяжения материала при перемотке | 1979 |
|
SU856959A1 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Многоканальный регулятор температуры | 1982 |
|
SU1091139A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Цифровой регулятор перемещения длинномерного материала в рабочую зону обрабатывающей машины | 1985 |
|
SU1274821A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Регулятор температуры | 1980 |
|
SU934457A1 |
Изобретение относится к радиотехнике и может быть использовано при создании интерактивных систем управления роботё1ми, обладающими оптимальными характеристиками. Известна система управления робо том, содержащая последовательно соединенные усилитель, двигатель и исполнительный орган, соединенный с нагрузкой датчиком нагрузки и дат чиком положения, выход которого под ключен к одному из входов усилителя и последовательно соединенные усили тель, двигатель и механическую пере чу, соединенную с задающим органом, датчиками нагрузки и датчиком полбЖ ния, выход которого подключен к . другому входу усилителя исполнитель ной следящей системы, логический блок и переключатель fl. Однако система имеет невысокие динамические характеристики. Наиболее близким по технической сущности к предлагаемому является система, содержащая первый ключ и последовательно соединенные тактовый генератор, блок паг-етти и второй ключ, причем выход первого ключа подключен ко второму входу блока памяти и по каждой регулируемой коо динате задающего и исполнительного органа блок сравнения и последовательно соединенные цифроаналоговый преобразователь, сумматор, усилитель и двигатель, связанный через датчик положения и датчик момента с исполнительным механизмом, выход датчика положения подключен к первому входу блока сравнения 2 . Однако в системе не предусмотрены корректирующие средства, компенсирующие влияние переменного момента инерции рабочих органов манипулятора на динамические характеристики приводов, оператор не может корректировать движения во время nporpeiMмного управления. Цель изобретения - расширение функциональных возможностей системы. Поставленная цель достигается тем, что система содержит последовательно соединенные функциональный преобразователь и третий ключ, и по каждой регулируемой координате задгиощего и исполнительного органа пропорционально-интегрально-дифференциальный регулятор и пропорционально-дифференциальный регулятор, а также по каждой регулируемой координате задающего органа связанный с исполнительным механизмом датчик усилия, выход, которого подключен к первому входу функционального Преобразователя, второй и третий входы которого соединены, соответственно, со входами датчиков момента задающего и исполнительного органа, второй выход Кс1ждого из которых через пропорциональнодифференциальный регулятор подключен ко второму входу сумматора, выход тактового генератора соединен со вторым входом третьего ключа, выход которого подключен ко второму входу первого ключа и второму входу каждого блока сравнения, третий вход которого соединен с выходом второго ключа, а выход через пропорциональноинтегрально-дифференциальный регулятор - ко входу цифроаналогового преобразователя.
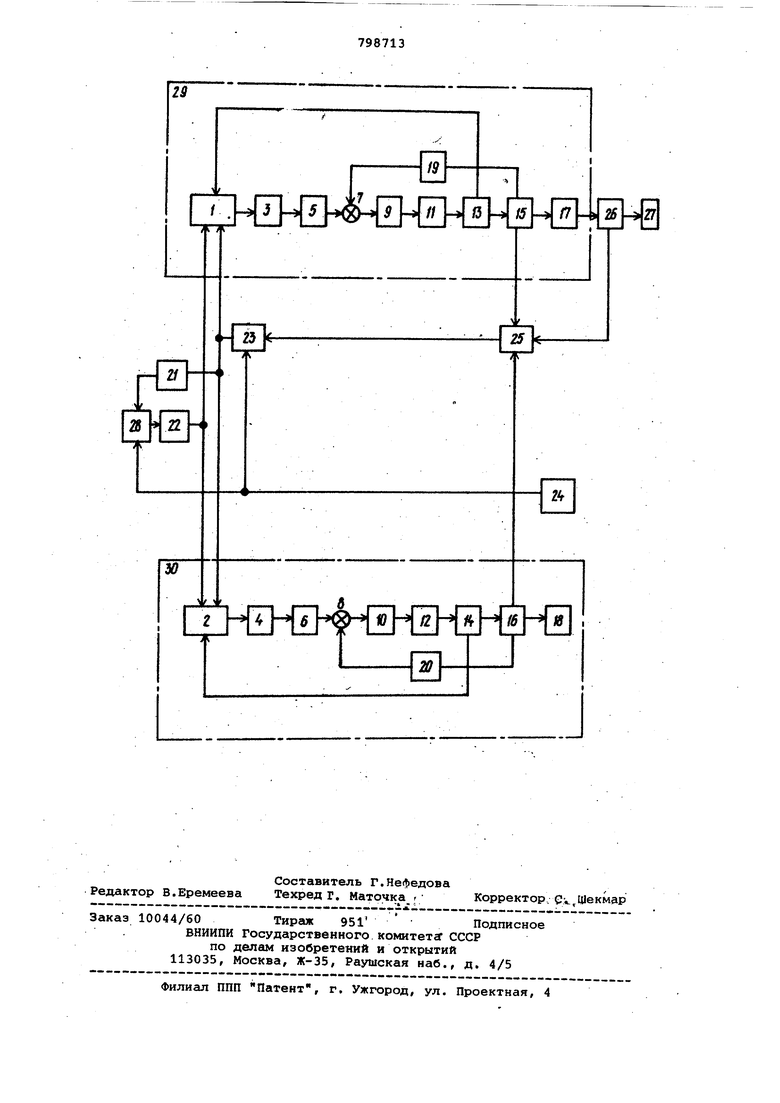
На чертеже представлена функциональная схема системы управления.
Система содержит блоки 1, 2 сравнения, пропорциональноинтегрально-дифференцисшьные регуляторы 3, 4, цифроаналоговые преобразователи 5, б, сумматоры 7, 8, усилители 9, 10, двигатели 11, 12, датчики 13, 14 положения, датчики 15, 16 момента исполнительные механизмы 17, 18, пропорционально-дифференциальные регуляторы 19, 20, первый 21, второй 22, третий 23 ключи, соответственно, тактовый генератор 24, функциональный преобразователь 25, датчик силы 26, многокоординатная рукоятка 27, блок 28 памяти, задающий орган 29, исполнительный орган 30.
Система работает следующим образом.
Система может быть использована в режиме состояния покоя (первый режим), режиме дистанционного управ ления с активным отражением сил (второй режим), режиме автоматичесKo.ro прозграммного управления (третийрежим). Во втором режиме можно осуществлять обучение робота. Третий и второй режимы совмещаются во времени когда оператор, воздействуя на орган дистанционного управлен1|я, вносит необходимые коррективы в автоматический режим работы,
Система работает следующим образрм.
В первом режиме система работает следующим образом.
На входы блоков 1, 2 сравнения не поступают сигналы управления. Сигнал датчика 26 силы равен нулю. Сигнгш датчика 15 момента пропорционален внутренним силам нагрузки. Исполнительный орган 30 нагружен внешней силой (сила веса транспортируемого груза)..Сигнал датчика 16 момента пропорционсшеы внешней и внутреннимсилам нагрузки. Коэффициенты передачи датчиков 15, 16 момента по выходам выбраны таким образом, что
сигналы, обусловленные внутренними силами нагрузки на задающем 29 и исполнительном 30 органах,взаимно компенсируются и напряжение на выходе датчика 16 момента пропорционально разности только внешних сил нагрузки. Кроме зтого датчики 15, 16 моментов через пропорционально-дифферен- . хиальные регуЛяторы 19, 20, усилители 9, 10 управляют двигателями 11, 12 аким образом, что моменты, созаваемые двигателями 11, 12, равны оментам нагрузки, действукяцим на атчики 15, 16, т.е. приводы задаюего 29.и исполнительного 30 органов нвариантны к силам нагрузки, действующим на датчики 15, 16 при правильном подборе параметров пропорционально-дифференциальных регуляторов 19, 0.
Неточности компенсации устраняются при наличии главным образом обратных связей от датчиков 13,14 положения, в результате которых любое движение, не соответствующее сигналам, пс ступаюим на блоки 1, 2 сравнения, вызывает несоответствие в блоках 1, 2 сравнения, в результате которого пропорционально-интегрально-дифферениальные регуляторы 3,4 формируют ополнительные сигналы компенсации.
Напряжение, снимаемое с датчиков 15, 16 момента и поступающее на вход функционального преобразователя 25, не вызывает включение третьего ключа 23, так как возникающий при этом напряжении ток проходит через его сопротивление в направлении, при котором создается сигнал запрета на третьем ключе 23.
Во втором режиме система работает следующим образом., Оператор, создавая на рукоятке
27управления силу, большую силы внешней нагрузки, обеспечивает сигнал напряжения на датчике 26 силы, больший сигнала напряжения, снимаемого с датчиков 15, 16 момента, в результате снимается запрет третьего ключа 23, который подсоединяет выход тактового генератора 24 к входам блоков 1 я 2 сравнения.
Приводы задающего 29 и исполнительного 30 органов воспроизводят одновременно и согласованно заданное движение, при этом регуляторы 3, 4 формируют оптимальные законы управления.
Если силы внешней нагрузки возрастают, то третий ключ 23 разрывает цепь управления.
Изменяя направление силы,действующей на рукоятку, оператор реверсирует движение двигателей 11, 12.
Для обучения робота включается первый,ключ 21.
В третьем режиме работы первый ключ 21 выключен, а второй ключ 22 включен. Сигнал управления из блока
28памяти поступает на входы блоков 1, 2 сравнения. Одновременно на эти входы могут поступать сигналы от ключа 23. Селективность сигналов обе печивается соответствукадей тактировкой импульсов управления. Применение изобретения позволяет за счет обеспечения возможности корректировки программьл.,в. процессе ее обработки расширить функциональ,ные возможности системы. Формула изобретения Интерактивная система управления робсэтом,содержащая первый ключ, и последовательно соединенные тактовый генератор, блок памяти и второй ключ, причем выход первого ключа подключен ко второму входу блока и по каждой регулируемой координате згадающего и исполнительного органа блок сравнения и последо вательно соединенные цифроаналоговый преобразователь, сумматор, усилитель и двигатель, связанный через датчик положения и датчик момента с исполнительным механизмом, выход датчика положения подключен к первому входу блока сравнения, отли чающаяся тем, что, с целью расширения функциональных возможностей системы, она содержит последовательно соединенные функциональный преобразователь и третий ключ, и по каждой регулируемой координате задаю щего и исполнительного органа пропорционально-интегрально- дифференциальный регулятор и пропорциональнодифференциальный регулятор, а также по каждой регулируемой коорди.нате за даклцего органа связанный с исполнительным механизмом датчик усилия, выход которого подключен к первому входу функционального преобразователя, второй и третий вход которого соединены, соответственно, с выходами датчиков момента задающего и исполнительного органа, второй выход каждого из KOTOFftjx через пропорционально-дифференциальный регулятор подключен ко второму входу сумматора, выход тактового генератора соединен со вторым входом третьего ключа, выход которого подключен ко входу первого ключа .и второму входу каждого блока сравнения, третий вход которого соединен с выходом второго ключа, а выход через пропорционально-интегрально-дифференциальный регулятор - ко входу цифроаналогового преобразователя. Источники информации, принятые во внимание прл экспертизе 1.Андреенко С.Н., Ворошилов М.С., Петров Б.А. Проектирование приводов манипуляторов. Л., Машиностроение, 1975, с. 136. 2.Авторское свидетельство СССР № 361868, кл. В 25 J 1/00, 1972 (прототип). (
