1
Изобретение относится к лодъемно-транспортной технике.
Известны механизмы поворота .рабочей платформы монтажного подъемника, содержащие зубчатую передачу, одна из шестерен которой насажена на вал с маховиком.
Цель изобретения - обеспечение дистанционного управления поворотом рабочей платформы.
Это достигается тем, что на валу установлены полумуфты, одн1а из которых жестко связана с основанием пл атформы, а другая снабжена подпружиненной недалью, на конце которой закреплена тяга управления.
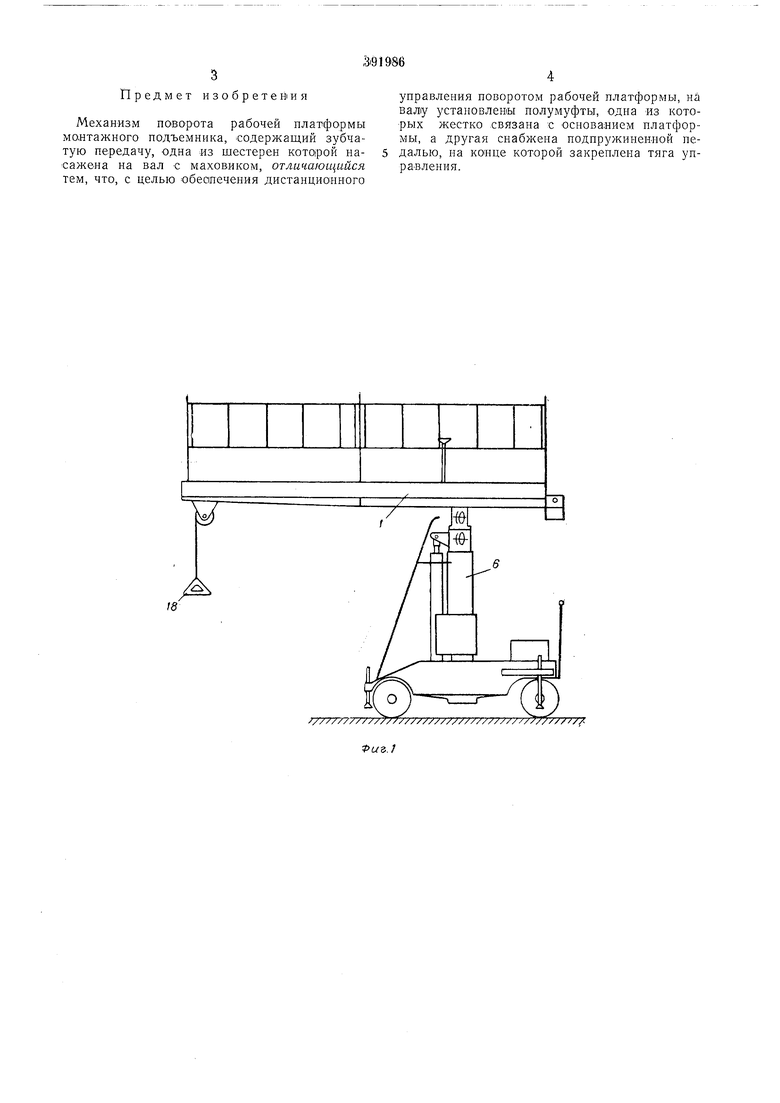
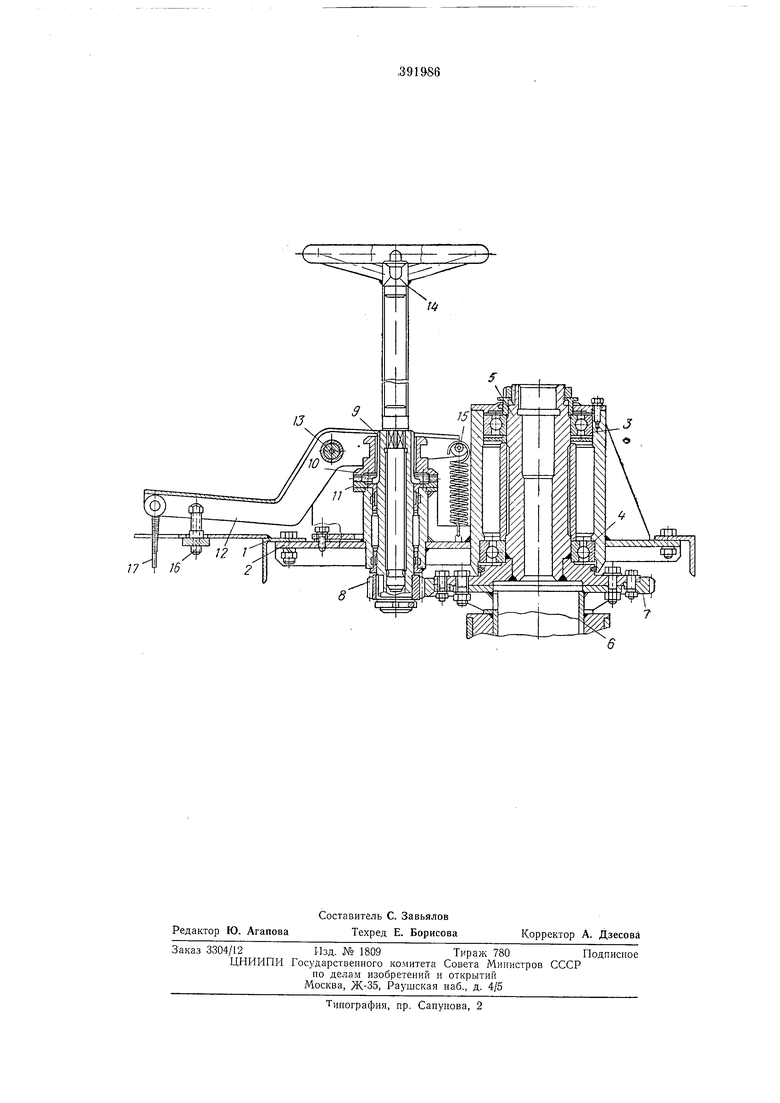
На фиг. 1. изображен монтажный подъемник, общий вид; на фиг. 2 - (предлагаемый механизм поворота рабочей платформы.
Механизм поворота смонтирован на рабочей платформе /, закрепленной на основании 2, которое посредством подшипников 3 и 4 качения установлено на пяте 5, закрепленной яа телескопической стойке 6 монтажного подъемника. Механизм поворота рабочей платфо|рмы содержит прикрепленную к пяте шестерню 7, находящуюся в зацеплении с шестерней 8, которая жестко закреплена валу 9.
На вал 9 насажена подвижная полумуфта 10, а на основании 2 жестко закреплена полумуфта Л. Верхняя полумуфта 10 связана с педалью 12, сидящей на оси 13. На верхнем
конце вала 9 установлен маховик :14. Педаль соединен1а с основанием 2 пружиной 15. Для регулирования угла поворота педали на рабочей платформе установлен регулировочный винт 16. К нижнему концу педали (прикреплен тросик 17 с ручкой 18.
Механизм работает следующим образом. Для осуществления поворота рабочей платформы в горизонтальной плоскости вращают маховик 14, который приводит .во вращение вал 9 с шестерней 8. Шестерня 8, обкатываясь по щестерне 7, вращает основание 2 и тем самым рабочую платформу /. Фиксация рабочей платформы осуществляется .находящимися ;з зацеплении полумуфтами 10 и 11.
При нажатии па педаль 12 она поворачивается относительно оси 13, и полумуфта 10, поднимаясь, выходит из зацепления с полумуфтой 11, закрепленной на основании 2.
С помощью шружины 15 возвращают педаль в исходное положение и вводят полумуфту 10 в зацепление с полумуфтой 11. Ручка 18, соединенная с тросиком, служит для осуществления поворота (рабочей платформы с оператором, находящимся не на платформе, а на земле. С помощью ручки расцепляют полумуфты 10 и 11 VI поворачивают рабочую платформу.
предмет изобретевия
Механизм поворота рабочей платформы мо.нтажного подъемника, содержащий зубчатую передачу, одна из шестерен которой насажена на вал с маховиком, отличающийся тем, что, с целью обеапечения дистанцио-нного
управления поворотом рабочей платформы, на валу установлены полумуфты, одна из которых жестко связана с основанием платформы, а другая снабжена подпружинешюй педалью, на коице которой закреплена тяга управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мускульный привод транспортного средства с возвратно-поступательным движением педалей | 1986 |
|
SU1507639A1 |
| ПРИВОДНОЕ УСТРОЙСТВО к ШВЕЙНОЙ МАШИНЕ | 1972 |
|
SU357300A1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОСТАНОВА ИГЛЫ ШВЕЙНОЙ МАШИНЫ В ЗАДАННОМ ПОЛОЖЕНИИ | 1970 |
|
SU270486A1 |
| Инерционный микромобиль | 1974 |
|
SU571277A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| МЕХАНИЗМ ВЫДАВЛИВАТЕЛЯ В ШВЕЙНОЙ МАШИНЕ ДЛЯ ПОТАЙНОЙ СТРОЧКИ | 1973 |
|
SU379702A1 |
| Подъемно-опускное устройство | 1974 |
|
SU519390A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| ТРАНСМИССИЯ ВЕЛОСИПЕДА | 2021 |
|
RU2760596C1 |