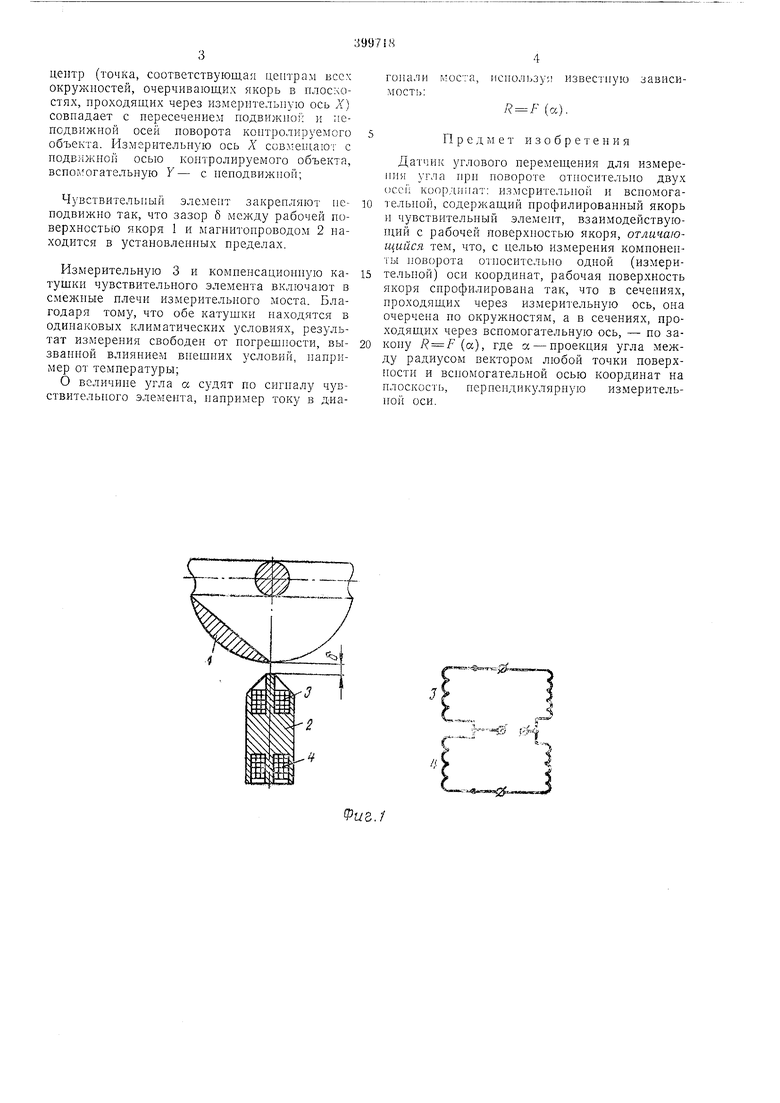
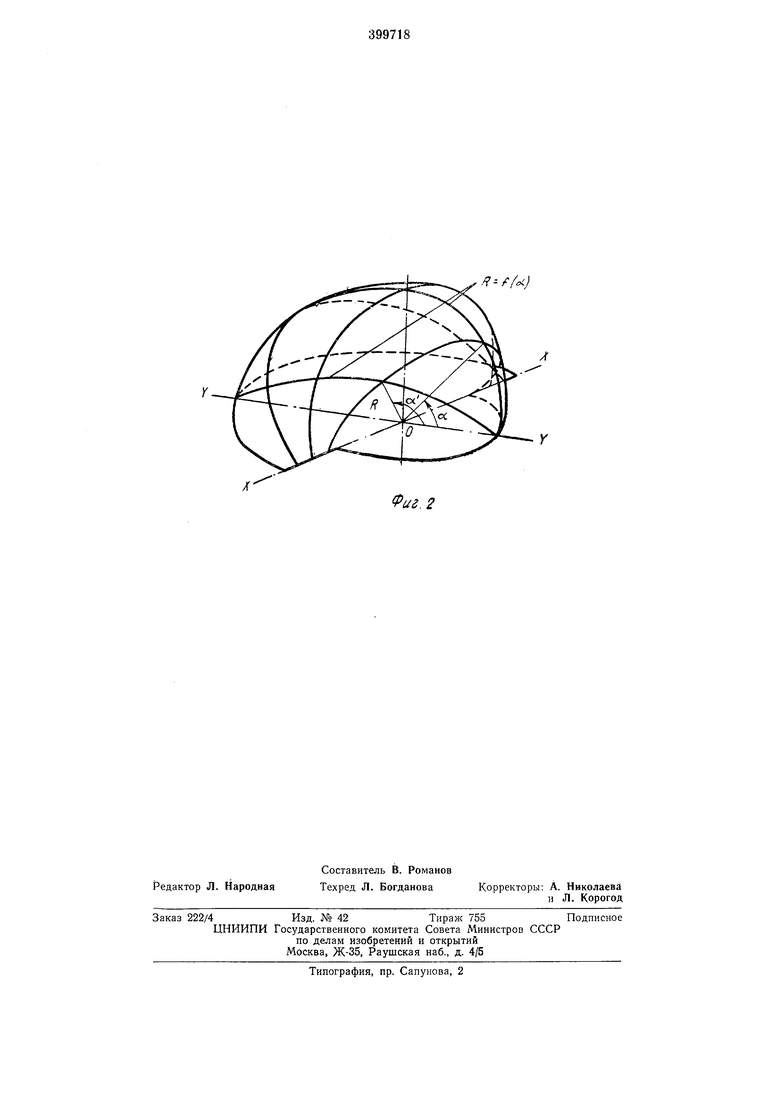
Изобретение относится к технике угловых измерений, а именно к средствам дистанционного измерения угла поворота. Известны датчики углового перемещения, содержащие профилированный якорь и чувствительный элемент, взаимодействующий с рабочей поверхностью якоря. Известные устройства позволяют преобразовать суммарный угол поворота якор51 в непрерывный сигнал. Однако при измерении двухкоординатных перемещений (поворотов относительно двух взаимно перпендикулярных осей координат; измерительной и вспомогательной) таким датчиком нельзя выделить компоненту поворота относительно одной (измерительной) оси координат. Предлагаемый датчик отличается тем, что рабочая поверхность якоря спрофилирована так, что в сечениях, проходящих через измерительную ось, она очерчена по окружностям, а в сечениях, проходящих через вспомогательную ось, - по закону ( где а - проекция угла между радиусом вектором любой точки поверхности и вспомогательной осью координат на плоскость, перпендикулярную к измерительной оси. Это позволяет измерять компоненты поворота относительно одной (измерительной) оси координат. На фиг. 1 изображен датчик; на фиг. 2 - якорь датчика. Предлагаемый датчик содержит магнитонроводящий якорь 1, закрепленный на контролируемом объекте, и чувствительный элемент, установленный неподвижно и выполненный в виде магнитопроводящего сердечника 2 и двух катушек 3 и 4, первая из которых является измерительной, а вторая - компенсационной. Чувствительный элемент реагирует на изменение зазора 6 между сердечником и якорем. Магнитопроводящий якорь датчика спрофилирован так (фиг. 2), что в сечении плоскостями, проходящими через измерительную ось X, его поверхность очерчена по окружности, а в сечениях, проходящих через вспомогательную ось К - по кривым, соответствующим заданному закону (а), где а - проекция угла а между радиусом вектором JR, проведенным в произвольную точку поверхности якоря, и осью У на плоскость, перпендикулярную к оси X. Датчик работает следующим образом. Магнитопроводящий якорь 1 закрепляют на контролируемом объекте так, что его условный
3
центр (точка, соответствующая центрам всс окружностей, очерчивающих якорь в плоскостях, цроходящих через измернтельцую ось л совпадает с пересечецием цодвижпок и иецодвижцой осей поворота коптролируемого объекта. Измерительцую ось X сов1еи1:ают с подБНжцой осью коцтролируемого объекта, вспомогательную Y- с неподвижной;
Чувствительный элемент закрепляют неподвижно так, что зазор 6 между рабочей поверхностью якоря 1 и ыагннтопроводом 2 находится в установленных пределах.
Измерительную 3 и компенсационную катушки чувствительного элемента включают в смежные плечи измерительного моста. Благодаря тому, что обе катушки находятся в одинаковых климатических условиях, результат измерения свободен от погрещности, вызванной влиянием внещннх условий, например от температуры;
О величине угла а судят по сигналу чувствительного элемента, например току в диа4
гонали моста, ис11ол1х-зу;1 известную зависимость:
R F (а).
Предмет изобретения
Датчик углового перемещения для измерения угла при повороте относительно двух осей координат: измерительной и всномогательной, содержащий профилированный якорь н чувствительный элемент, взаимодействующий с рабочей поверхностью якоря, отличающийся тем, что, с целью измерения компоненты поворота относптельно одной (измерительной) оси координат, рабочая поверхность якоря спрофилирована так, что в сечениях, проходящих через измерительную ось, она очерчена по окружностям, а в сечениях, проходящих через вспомогательную ось, - по закону R F(a}, где ее - проекция угла между радиусом вектором любой точки поверхности и всиомогательной осью координат на плоскость, перпендикулярную измерительной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2343418C1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2299409C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Устройство для определения угла наклона подвижного объекта | 1988 |
|
SU1719888A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УСКОРЕНИЯ | 2009 |
|
RU2401431C1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
-ff)
Фиг. 2
