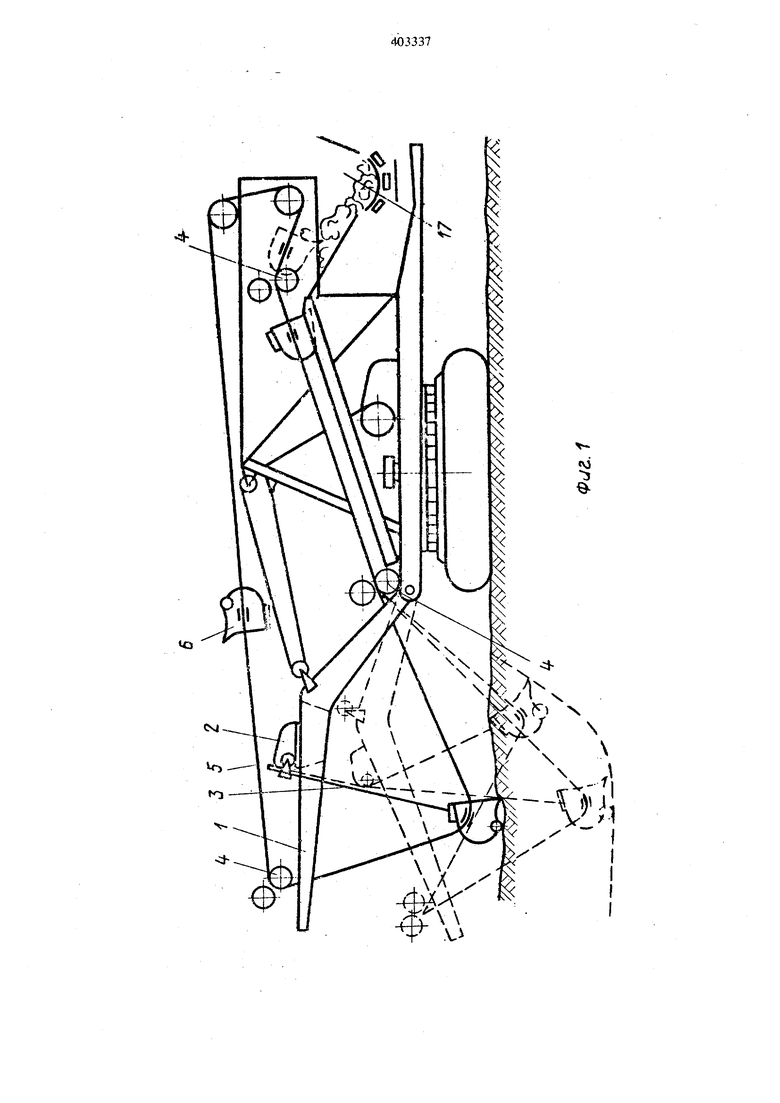
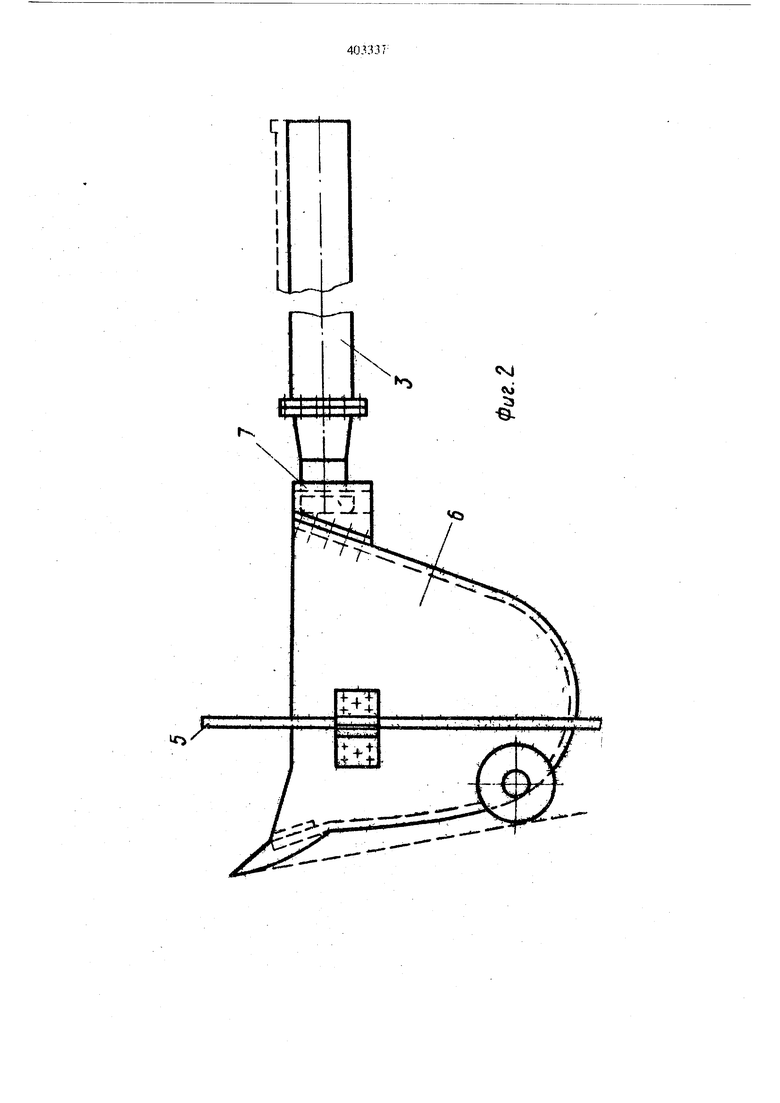
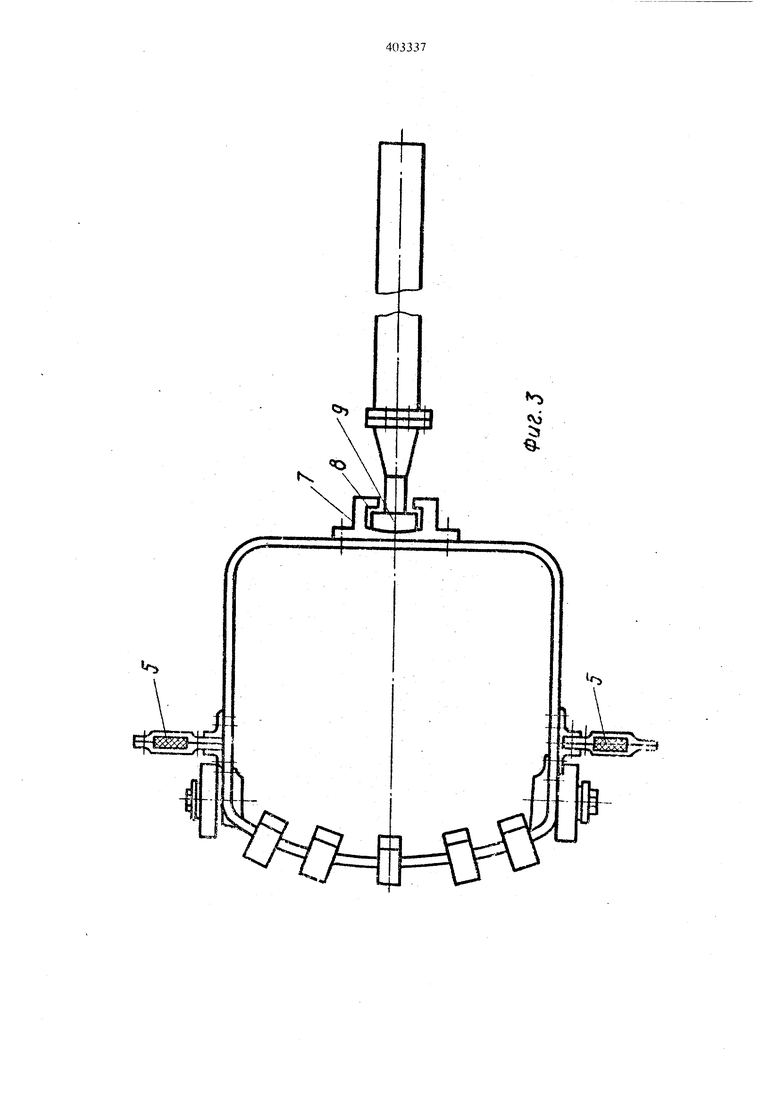
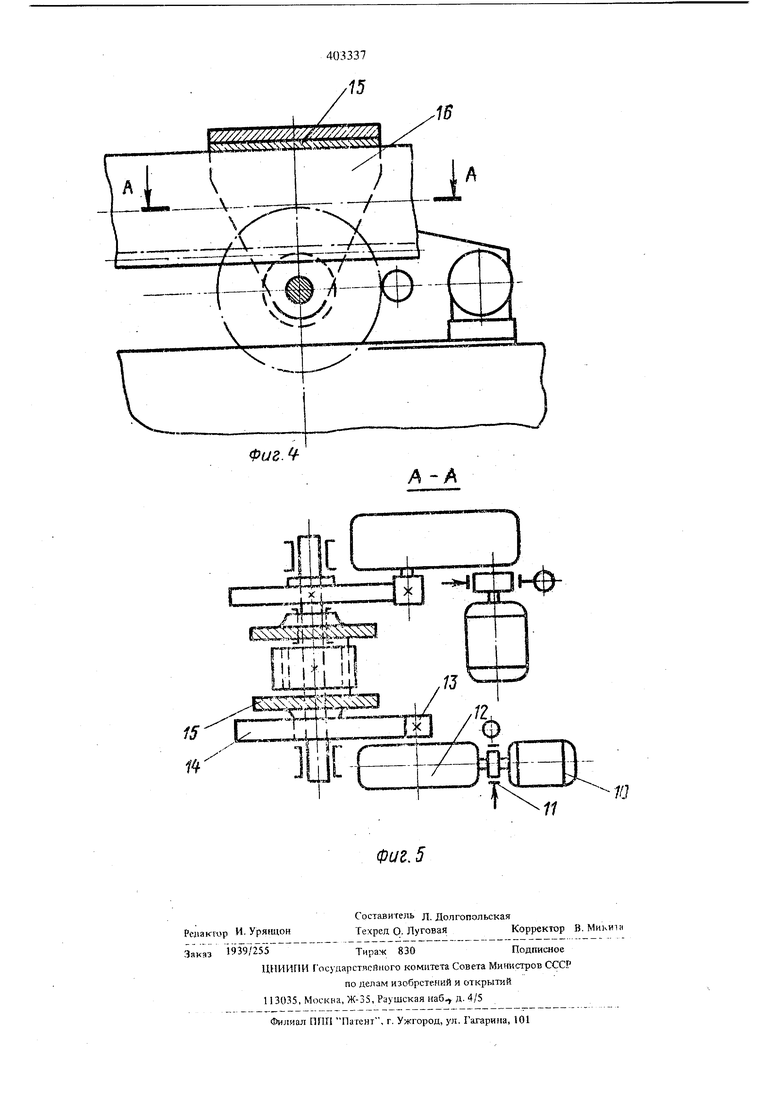
.Известен экскаватор, включаюишй лебедки с приводными барабанамн.стрелу с напорным механизмом н седловым подшипником, рукоять я сменный рабочий орган. Недостатком такого экскаватора является относительно низкая производительность, так как 65% времени экосаватор затрачивает на поворотные дви , жения, связанные с транспортированием груша к месту разгрузки, а также большой расход энергии. Цель изобретения - повышение производительное ти и снижение энергоелйсости. Для этого экскаватор вьпюпнен с пропущенными между нриводнынш шкиваК и лебедок бесконечными гибкими элементами с закрепленньпии на них дополните.11ЬН1э1ми.к6вшаМИ установлешп.ми ЕЙ стреле механизмом принудительного углового пово рота рз кояти. Каждый из дополнительных ковшей снабжен упор ной пятой, в которой образован продольный паз, взаимодействующий с вьтолненным на концевой части рукояти выступом, а механизм принудительного углового поворота рукояти вьшолнен в виде зубчатой передачи, одна из шестерен которой связана с седловьгм подшипником напорного На фиг. 1 изображен экскаватор, общий вид; на фиг. 2 ковш с рукоятью, вид сбоку; на фиг. 3 тО же, вид сверху; иэ фиг. 4 - механнзм принудительного углового поворота рукояти; на фиг. 5 разрез по А-А на фиг. 4. Экскаватор состоит из стрель 1 с механизмом 2 принудительного углового поворота рукояти 3, приводных П1КНВОВ 4, между которымн пропущены бесконечные гибкне элементы 5 С: закрепленными на них дополнительными ковшами 6. Каждый ковш снабжен упорной пятой 7. В упорной пяте образован продольный паз 8, взаиМодействуюший с вьшолнекным на кощевой части рукояти выступом 9. Ковши 6 в процессе копания имеют возможность быстро а диняться с рукоятью 3 и отсоединя ;я от нее, так как рукоять совершает линейные и угловые перемещения в вертикальной плоскости, которые ей сообщает механизм 2. Механизм поворота состоит из двигателя 10, тормоза 11, редуктора 12 и зубчатых колес13и14. Колесо 14 неподвижно соединено со ступицей 15 седлового подшипника. Ковш 6, закрепленный на гибких элементах 5, движется вместе с ними по эал кнутому контуру. В момент, когда один из ковшей приблизится к подошве забоя, с ним соединяется управляемая рукоять 3, которая прижимает ковш к грунту. Процесс копания грунта каждым ковшом в принципе не отличается от процесса KonamHiqjyHта ковшами существующих одноковшовыч экск5ва торов. Заполненный ковш с помощью механизма 16 нано ра и рукояти Э выводится из контакта с грунтом, а рукоять отсоединяется от ковша. Затем ковщ на гибких элементах поднимается к тяговой лебедке, огибает ее шкивы, и грунт выгружается на транспортер 17. Порожние ковши, передвигаясь по контуру гибких элементов, поступают в зону копания. Таким образом, при любом положении ковша в зоне копаННЯ.ВОЗМОЖНО надежное и быстрое соединение и разъединенне ковгца и рукояти, что позволяет вести процесс копа1тя почти непрерывно. Формула изобретения 1 .Экскаватор,включающий ходовую часть, лебедки, стрелу с напорным механизмом и седповым подилшннком, рукоять и сменный рабочий орган, отличающийся тем, что, с пелью повышения производительности и снижения удельных энергозвтрат, экскаватор выполнен с пропущенными между приводными шкивами лебедок бесконечными гибкими злемеьшми с закрепленными на них дополнительными ковшами и с установленным на стреле меха131змом принудительного углового поворота рукояти. 2. Экскаватор по п. 1, отличающийся тем, что каждый из дополнительных ковщей выполнен с упорной пятой, в которой образован продольный паз, взаимодейс7вуюшлй с выполненным на концевой части рукояти выступом. З.Экскаватор поп.1, отличающийся тем, что, механизм принудительного углового поворота вьшолнеи в виде зубчатой передачи, одна из {иестерен которой связана с седловым попшнпником ншорного механизма.
СЧ1
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| Рабочее оборудование экскаватора | 1989 |
|
SU1700149A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| Экскаватор | 1986 |
|
SU1362789A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА ТИПА ПРЯМАЯ ЛОПАТА | 1970 |
|
SU281269A1 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |