1
Изобретение предназначено для автоматизации процессов измельчения при лроизводств.е цемента.
Известны способы управления процессом помола, в которых управляющим воздействиями являются расходы компонентов, а в качестве промежуточных сигналов для управления используются электроакустические и электровибрационные сигналы. Расход компонентов в мельницу фиксируется с помощью пропорционального регулятора про-межуточного сигнала.
Эффективность стабилизации выходного сигнала с помощью регулятора целиком определяется правильностью выбора коэффициента передачи регулятора или, иными словами, правильностью выбора соотношения между промежуточным сигналом и расходом компонентов. Для обеспечения эффективности работы регулятора производится самонастройка на оптимальное соотношение но корреляции между промежуточным и выходным сипналамИ.
Недостаток известного способа заключается в том, что он ,не обеспечивает оптимальную настройку в условиях непрерывной коррекции задания регулятору ло отклонению выходного сигнала от заданного значения.
Цель изобретения - повышение степени стабилизации выходного сигнала.
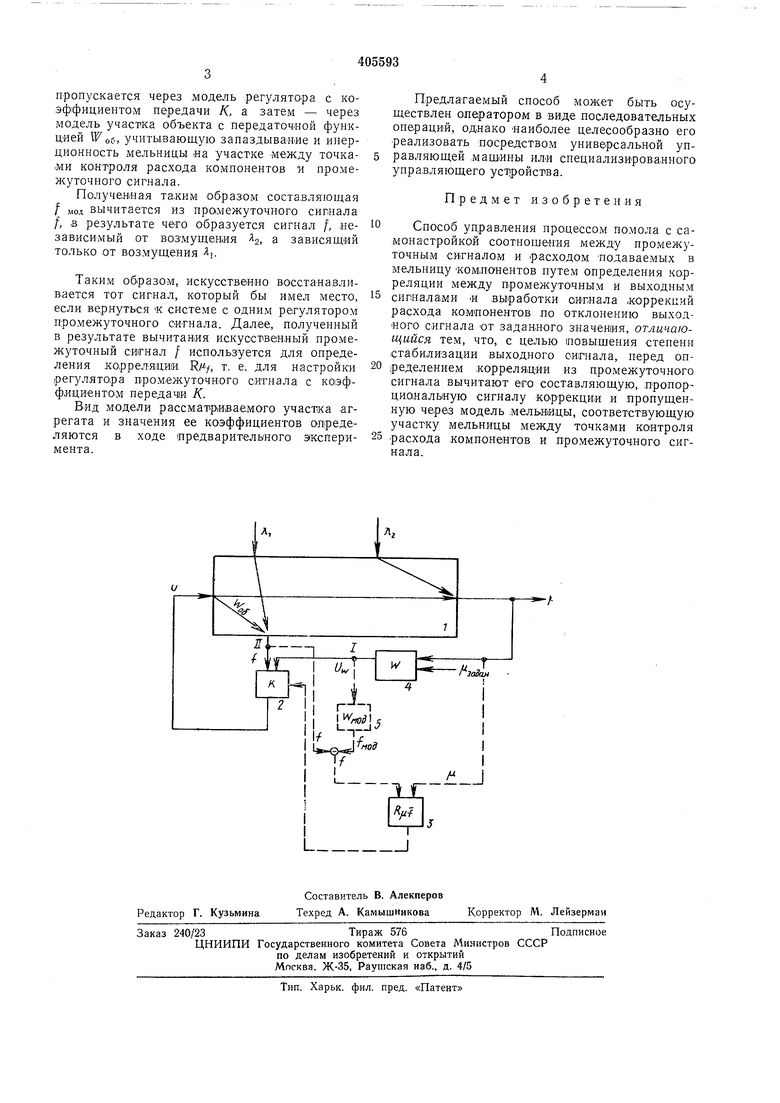
Это достигается тем, что перед определением корреля:ци.и из промежуточного сигнала вычитают его составляющую, пропорциональную сигналу коррекции и пропущенную через
модель мельницы, соответствующую участку мельницы между точками контроля расхода компонентов и промежуточного сигнала. Сущность способа поясняется чертежом. Устройство для осуществления способа содержит мельницу / с расходом .компонентов и, неконтролируемыми возмущениями ij, 2 и выходным сигналом /J-, регулятор 2 промежуточного сигнала с коэффициентом передачи К, вычислитель 3 корреляции , регулятор 4
с передаточной функцией w, осуществляющий непрерывную коррекцию задания регулятору промежуточного сигнала по отклонениям сигнала ,« от заданного значения .зад. Модель участка 5 системы от точюи I до точки II с
передаточной функцией W молt/,p - управляющее воздействие регулятора 4.
Для настройки коэффициента передачи /С необходимо, чтобы сигнал / не зависел от возмущен.ия 2- Способ состоит в том, что из сигнала / удаляется та его составляющая f нод-, которая обусловлена наличием сигнала i/w Для получения этой составляющей сигнал Uw пропускают через модель участка системы от
точки I до точки II, т. е. сигнал Uw сначала
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом помола | 1980 |
|
SU939080A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПОМОЛА В ШАРОВОЙ МЕЛЬНИЦЕ | 1970 |
|
SU265697A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПОМОЛА ПО КОРРЕЛЯЦИИ ПРОМЕЖУТОЧНОГО И ВЫХОДНОГОСИГНАЛОВ | 1971 |
|
SU309733A1 |
| Система автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491579A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491580A1 |
| Способ управления процессом выращивания монокристаллов под защитной жидкостью методом Чохральского и устройство для его осуществления | 1988 |
|
SU1745780A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| Способ управления процессом помола | 1979 |
|
SU774590A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1414461A1 |
