Кривая эксцентриков, получаемая на существующих станках (архимедова спираль), не обеспечивает равномерной подачи инструмента на автомате; отклонения здесь для существующих автоматов достигают часто 10-15% от допустимой подачи в сторону увеличения или уменьщения. Не выдерживается также рабочий путь 5 инструмента: для некоторых автоматов („Индекс) он получается больше требуемого, для других („БраунШарп)- меньше требуемого.
Конструкция предлагаемого станка представляет собою противоположность автомату; если на автомате равномерным вращением эксцентрика осуществляется равномерное перемещение инструмента, то здесь равномерным вращением эксцентрика и равномерным перемещением рейки (тождественно перемещению револьверной головки на автомате) и сцепленной с зубчатым сектором одного колена углового рычага, сообщается подача по окружности инструменту, поворотно укрепленному на втором колене рычага, чем осуществляется получение точной кривой эксцентрика.
Отличие этого станка от существующих в настоящее время (фирмы Бешле и др.) заключается, таким образом, в том, что здесь подача инструмента (фрезы или шлифовального камня) производит(507)
ся тем же угловым рычагом, который на автомате перемещает салазки, по окружности определенного радиуса, а на тех станках подача инструмента производится прямолинейно.
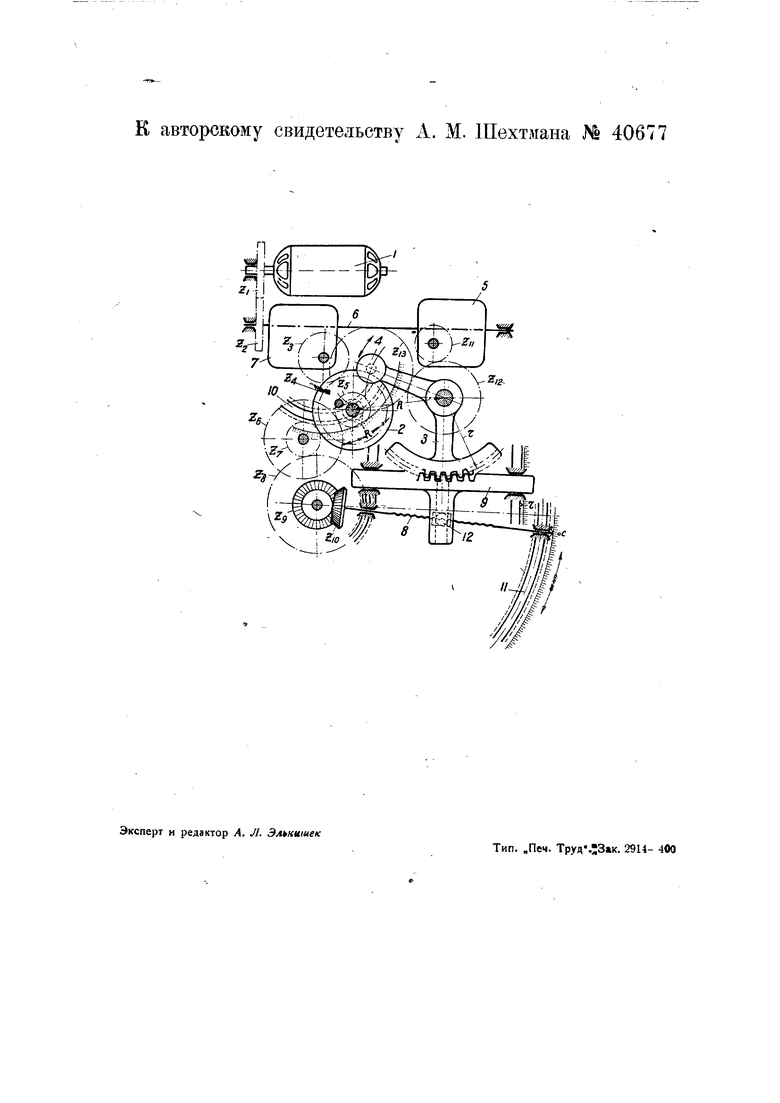
На чертеже дана кинематическая схема предлагаемого станка.
Станок состоит из стола, на котором укреплены мотор /, приводящий в движение через системы передач эксцентрик 2, угловой рычаг 3 и инструмент 4 (фреза или шлифовальный камень).
Основные движения на станке: 1) вращение эксцентрика2, 2) вращение инструмента 4 иЗ) вращение углового рычагаЗ.
Скорость вращения инструмента 4 определяется, как обычно, допустимой для него скоростью резания. Передача движения к инструменту идет от коробки скоростей 5, получающей движение От мотора 7 через зубчатую передачу i, Zj, и главный вал 6-через передачу Z, Zi2, Zi3. Диаметр инструмента должен быть равен диаметру ролика, скользящего по эксцентрику; размер роликрв для разных автоматов колеблется в пределах от J2 до J8 мм. Можно, поэтому, ограничиться в коробке скоростей четырьмя скоростями: двумя - для фрезы, двумя - для шлифовального камня.
Скорость вращения эксцентрика 2 определяет собою и скоростб вращения
УГЛОВОГО рычага и поэтому определяется допустимой подачей инструмента и размером плеча рычага.
Передача движения к эксцентрику идет от коробки подач 7, получающей движение от мотора / через зубчатую передачу Zj, Zg и главный вал 6-через постоянную передачу Zg, Z.
Движение от эксцентрика 2 к угловому рычагу передается через сменную зубчатую передачу Z, Zg, Z,, Zg, постоянную коническую пару Zg Zjo, ходовой винт 8 и рейку 9.
Для разных автоматов угловой рычаг имеет разные размеры, а также различное расстояние R между осями рычага и эксцентрика. Ось сменного рычага неподвижна, а ось эксцентрика может перемещаться по пазу W, представляющему собой дугу окружности с центром в оси зубчатки Zs коробки подач и укрепляться на определенном расстоянии от оси рычага. На оси эксцентрика 2 имеется стрелка-указатель, показывающая на градуированной дуге это расстояние R. Направляющие рейки также могут быть переставлены так, чтобы расстояние между начальной окружностью рейки и осью рычага равнялось начальному радиусу г зубчатого сектора рычага 5. Стрелка-указатель направляющей также указывает это расстояние г на специальной щкале.
Передаточное число от эксцентрика к сегм(нтному рычагу определяется требуемой формой кривой эксцентрика и осуществляется сменой щестерен Zg, Z, Zy и Zs, а также изменением угла а между ведущим ходовым винтом 8 и рейкой 9. Подшипники ходового винта перемещаются по пазам //, представляющим собою дуги окружностей с общим центром в оси зубчатки Zg и укрепляются под определенным углом а к рейке.
Стрелка-указатель на подщипнике указывает этот угол а. При одном обороте винта гайка /2, связывающая рейку с винтом, перемещается по винту на шаг Н винта, а рейка перемещается на расстояние И. cos а.
ЕСЛИ обозначить передаточное число от эксцентрика к ходовому винту Zj, Zj, Zy, Zg, Zg, ZIQ через г, щаг ходового винта через //.„.„, угол установки винта через а, то для кривой с параметрами
а сотых (лучей) и 5.,,.,, (рабочий путь) получим равенство:
cos о; 5 ТбО
или
100. S
г- cosa Н- т.
Как видно из полученной зависимости, для каждой определенной кривой требуется постоянство произведения i cos а, независимо от величин отдельных сомно5 ителей. Очевидно, для сильно.-различающихся по своим константам (S и а) кривых- потребуются различные сменные передачи (г), для слабо различающихся - разный угол (а) установки ходового винта.
Таким образом, совокупность обеих переменных дает возможность получить любую кривую эксцентрика.
Предмет изобретения.
Станок для изготовления эксцентриков однощпиндельных автоматов с использованием углового рычага, отличающийся тем, что на одном колене этого рычага 3 помещен вращающийся режущий инструмент 4 с целью сообщения ему подачи по окружности при перемещении второго колена при помощи помещенного на нем зубчатого сектора, сцепленного с получающей равномерное движение рейкой 9.
-те.
rv