1
Известны устройства для контроля прямолинейности движения землеройных машин, например роторных экскаваторов, включающие источник светового луча, систему слежения за лучом в плапе с винтовой нарой и фотоприемииками, датчик смещения корпуса машины относительно луча и сумматор.
Цель изобретения - повыщепие качества регулирования и надежиости системы.
Достигается цель тем, что к гайке винтовой пары жестко прикреплена консоль с установленными на ней дополнительными фотоприемни сами, выходы которых электрически связаны с сумматором.
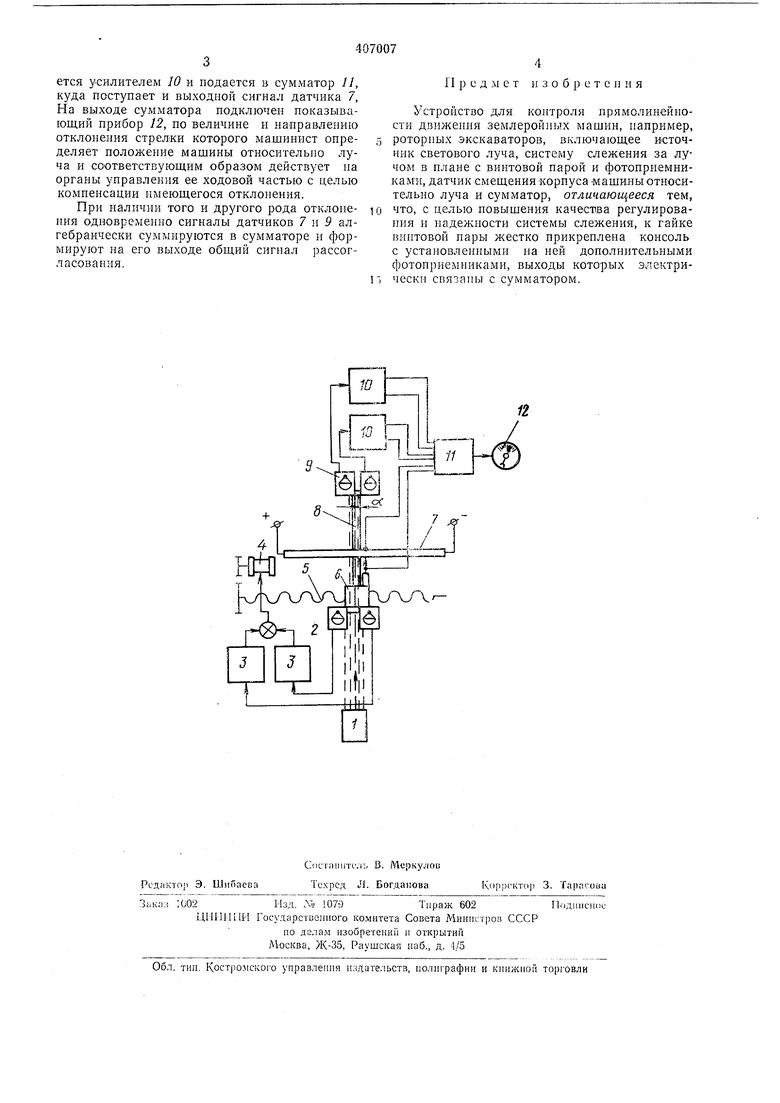
На чертеже изображена принципиальная схема устройства.
Устройство включает задающий элемент в виде источника света /, следящую систему, установленную на машине и состоящую на фотоприемников 2, фотоусилителей 5, электродвигателя 4 с редуктором, винтовой пары с винтом 5 и гайкой 6, датчик 7 смещения машины относительно луча, консоль 8, фотоприемники 9, установленные на консолн и измеряющие угловое отклонение машииы, фотоусилители 10, сумматор // и показывающий прибор 2.
Устройство работает следующим образом.
Источник света 1 устанавливается за машиной и ориентируется ио линии задания.
При нормальном положении мащииы все элемеиты устройства занимают нейтральиое положение, а световой луч располагается между фотоцриемииками 2.
При малейшем отклоиеиии машины относительно луча один из фотоприемииков попадает под свет и на его выходе появляется сигнал рассогласования. Этот сигнал носле усиления усилителем .: приводит в действие двигатель 4, который посредством винта 5 неремещает гайку 6, несущую фотонриемники 2, движок датчика 7 и консоль 8 с фотоцриемииками 9, в стороиу нейтрального положения. Гайка 6 с закрепленными на ней элементамн постоянно поддерживается на лииии задания.
Аналогичиая следящая система (иа чертеже ие показаиа) имеется и для слежеиия за лучом в вертикальиой плоскости.
При смещеиии машииы отиосительио луча иа величину, превышающую зону нечувствительностн датчнка 7, на выходе последнего появляется сигнал рассогласования, пропорциональный указанному смещению. На выходе одного из фотопрцемников 9 сигнал рассогласования ноявляется только тогда, когда между нродольной осью консоли и осью луча и.меется некоторый угол а, так как в противном случае эти фотоприемники загораживаются перед ними фотонриемннка.ми 2. Выходной сигнал одного из фотонриемников 9 усиливается усилителем 10 и подается в сумматор 11, куда поступает и выходиой сигнал датчика 7, На выходе сумматора подключен показывающий прибор 12, по величине и направлению отклонения стрелки которого машинист определяет положение машины относительно луча и соответствующим образом действует па органы управления ее ходовой частью с целью компенсации имеющегося отклонения.
При наличии того и другого рода отклонения одновременно сигналы датчиков 7 и 9 алгебраически суммируются в сумматоре и формируют на его выходе общий сигнал рассогласования.
11 р с д м е т н 3 о б р е т е н и я
Устройство для контроля прямолинейности движения землеройных машин, например, роторных экскаваторов, включающее источник светового луча, систему слежения за лучом в плане с винтовой парой и фотоприемниками, датчик смещения корпуса машилы относительно луча и сумматор, отличающееся тем, что, с целью новышения качества регулирования и надежности системы слежения, к гайке винтовой пары жестко прикреплена консоль с установленными на ней дополнительными фотонриемниками, выходы которых электрически связаны с сумматором.