Известны устройства для автоматической стабилизации курса землеройных машин, например, трехо порного роторного экскаватора, включающее световое задающее устройство, фото:прием1ники с фотоусилителями и механизм для алгебраического суммирования сигналов углового отклонения и смещения центральной оси мащины.
Однако недостаточно высокое качество регулирования приводит к смещению корпуса землеройной машины от заданного пути, вызывая отклонения параметров стружки и повышение потерь производительности.
Для повышения качества регулирования в описываемом устройстве фотоприемники смонтированы на корпусе машины симметрично ее центральной оси и имеют объективы, размеры которых равны допустимым отклонениям контролируемых точек, а механизм для алгебраического суммирования сигналов углового отклонения и смещения центральной оси машины выполнен с двухтактными магнитными усилителями, входы которых соединены с фогоусилителями, а выходы - с приводом землеройной машины.
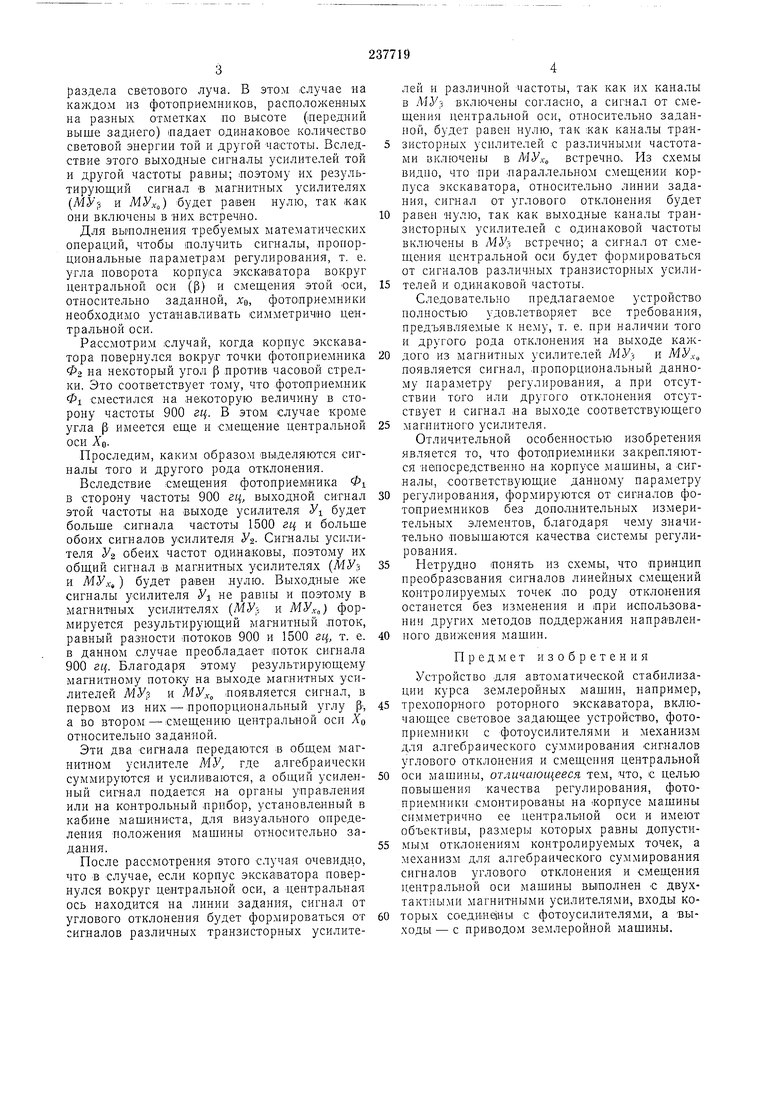
На чертеже представлена принципиальная схема предлагаемого изобретения.
Два фотоприемника, имеющие объективы с размерами, равными допустимым отклонениям контролируемых точек, закрепляются на
корпусе машины, симметрично ее центральной оси. Сигналы фотоприемников усиливаются транзисторными усилителями У и Уа и разделяются по частоте. Усиленные и разделенные сигналы по частоте после выпрямления подаются на входы магнитных усилителей МУэ и , в первом из которых выделяется сигнал, пропорциональный углу поворота машины вокруг центральной оси, а во втором- смещению этой оси относительно заданной.
Для реверсирования сигнала углового отклонения при движении машины назад выходная цепь магнитного усилителя МУ--, включена через переключатель (на схеме не показано).
Транзисторный усилитель включает три блока: общий, в котором усиливаются сигналы обеих частот с последующим разделением их, и два канальных, в каждом из которых усиливается сигнал данной частоты.
В усилителе предусмотрено автоматическое регулирование усиления.
Схема устройства работает следующим образом. Световой генератор устанавливается за машиной так, чтобы линия раздела луча по частоте совпадала с линией задания.
При правильном положении корпуса экскаватора относительно задания середины фотоприемников по вертикали совмещены с линией раздела светового луча. В этом 1случае на каждом из фотоприемников, расположенных на разных отметках по вы,соте (передний выше заднего) шадает одинаковое количество световой энергии той и другой частоты. Вследствие этого выходные сигналы усилителей той и другой частоты равны; поэтому их результирующий сигнал в магнитных усилителях (МУр1 и МУх,) будет равен нулю, так как они включены в них встречно. Для выполнения требуемых математических операций, чтобы получить сигналы, пропорциональные параметрам регулирования, т. е. угла поворота корпуса экскаватора вокруг центральной оси (Р) и смещения этой -оси, относительно заданной, Хо, фотоприемники необходимо устанавливать симметрично центральной оси. Рассмотрим случай, когда корпус экскаватора повернулся вокруг точки фотоприемника Фв на некоторый угол р против часовой стрелки. Это соответствует тому, что фотоприемник 01 сместился на некоторую величину в сторону частоты 900 гц. В этом случае кроме угла (3 имеется еще и смещение центральной оси АО. Проследим, каким образом выделяются сигналы того и другого рода отклонения. Вследствие смещения фотоприемника Ф в сторону частоты 900 гц, выходной сигнал этой частоты на выходе усилителя У будет больше сигнала частоты 1500 гц и больше обоих сигналов усилителя Уд. Сигналы усилителя УЗ обеих частот одинаковы, поэтому их общий сигнал в магнитных усилителях (МУз и My.v, ) будет равен нулю. Выходные же сигналы усилителя У не равны и поэтому в магнитных усилителях (МУ,-, и МУх„) формируется результирующий магнитный поток, равный разности потоков 900 и 1500 гц, т. е. в данном случае преобладает поток сигнала 900 гц. Благодаря этому результирующему магнитному потоку на выходе магнитных усилителей МУ и МУл-„ появляется сигнал, в первом из них - пропорциональный углу р-, а во втором-смещению центральной осп АО относительно заданной. Эти два сигнала передаются в общем магнитном усилителе МУ, где алгебраически суммируются и усиливаются, а общий усиленный сигнал подается на органы управления или на контрольный прибор, установленный в кабине машиниста, для визуального определения положения машины относительно задания. После рассмотрения этого случая очевидно, что в случае, если корпус экскаватора повернулся вокруг центральной оси, а центральная ось находится на линии задания, сигнал от углового отклонения будет формироваться от сигналов различных транзисторных усилителей и различной частоты, так как их каналы в Л1Уз включены согласно, а сигнал от смещения центральной оси, относительно заданной, будет равен нулю, так :как каналы транзисторных усилителей с различными частотами включены в /Viy.i-o встречно,. Из схемы видно, что при параллельном смещении корпуса экскаватора, относительно линии задания, сигнал от углового отклонения будет равен нулю, так как выходные каналы транзисторных, усилителей с одинаковой частоты включены в уИУз встречно; а сигнал от смещения центральной оси будет формироваться от сигналов различных транзисторных усилителей и одинаковой частоты. Следовательно предлагаемое устройство полностью удовлетворяет все требования, предъявляемые к нему, т. е. при наличии того и другого рода отклонения на выходе каждого из магнитных усилителей МУз и МУл-„ появляется сигнал, пропорциональный данному параметру регулирования, а при отсутствии того или другого отклонения отсутствует и сигнал на выходе соответствующего магнитного усилителя. Отличительной особенностью изобретения является то, что фотоприемники закрепляются непосредственно на корпусе машины, а сигналы, соответствующие данному параметру регулирования, формируются от сигналов фотоприемников без дополнительных измерительных элементов, благодаря чему значительно повышаются качества системы регулирования. Нетрудно понять из схемы, что принцип преобразования сигналов линейных смещений контролируемых точек по роду отклонения останется без изменения и при использовании других методов поддержания направленного движения машин. Предмет изобретения Устройство для автоматической стабилизации курса землеройных машин, например, трехопорного роторного экскаватора, включающее световое задающее устройство, фотоприемники с фотоусилителями и механизм для алгебраического суммирования сигналов углового отклонения и смещения центральной оси машины, отличающееся тем, что, с целью повышения качества регулирования, фотоприемники смонтированы на корпусе машины симметрично ее центральной оси и имеют объективы, размеры которых равны допустимым отклонениям контролируемых точек, а механизм для алгебраического суммирования сигналов углового отклонения и смещения н,ентральной оси .машины выполнен с двухтактны.ми магнитными усилителями, входы коорых соединенны с фотоусилителями, а выоды - с приводом землеройной машины. fJSOOZil/ f зоогц X исполнительном} Т f 900гц Й),0
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ ДВИЖЕНИЯ ЗЕМЛЕРОЙНЫХ МАШИН | 1973 |
|
SU407007A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Фотоприемное устройство для контроля положения землеройной машины | 1988 |
|
SU1602948A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАРЬЕРНОГО ЭКСКАВАТОРА В ПРОСТРАНСТВЕ | 1972 |
|
SU336400A1 |
| Приемное устройство системы навигации летательного аппарата по радиосигналам маяков | 1976 |
|
SU709013A3 |
| Двухканальный светоприемник для управления положением машины | 1988 |
|
SU1573166A2 |
| Измерительная головка | 1986 |
|
SU1409866A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕПАРАЛЛЕЛЬНОСТИГРАНЕЙ СТЕКЛА | 1972 |
|
SU431126A1 |
| Устройство для управления движущимися объектами | 1980 |
|
SU906268A1 |

