1
Настоящее изобретение относится к области стаикостроения и может быть использовано в следящих приводах контурных систем пропраммного управления металлорежущими станками.
Известны электрогидравлические следящие системы с цифровым регулироваНнем скорости гидродвигателя, в которых ква;нтование расхода рабочей жидкости по времени и уровню осуществляется электрОгидравлическнм цифровым регулятором.
Система содержит но следовательпо соединенные блок цифрового преобразования, электрогндравлический цифровой регулятор с золотнн|ка-ми электромагНИтного управления и лндродв игатель, выход которого через устройство обратной связи подключен к входу элемеЕгта сравнения.
Их недостатком является сложность электрогидравлического цифрового регулятора и большие потери в нем мон иости.
С целью унрощбН:НЯ устройства гидродвигатель выпол1нен многосекциониым с общим выходным валом, причем секции соединены с магистралями слива н нагнетания через золотники электрогидравлического цифрового регулятора, а геометрические размеры секций выполнены в соответствии с соотношением 1:2:4:8.
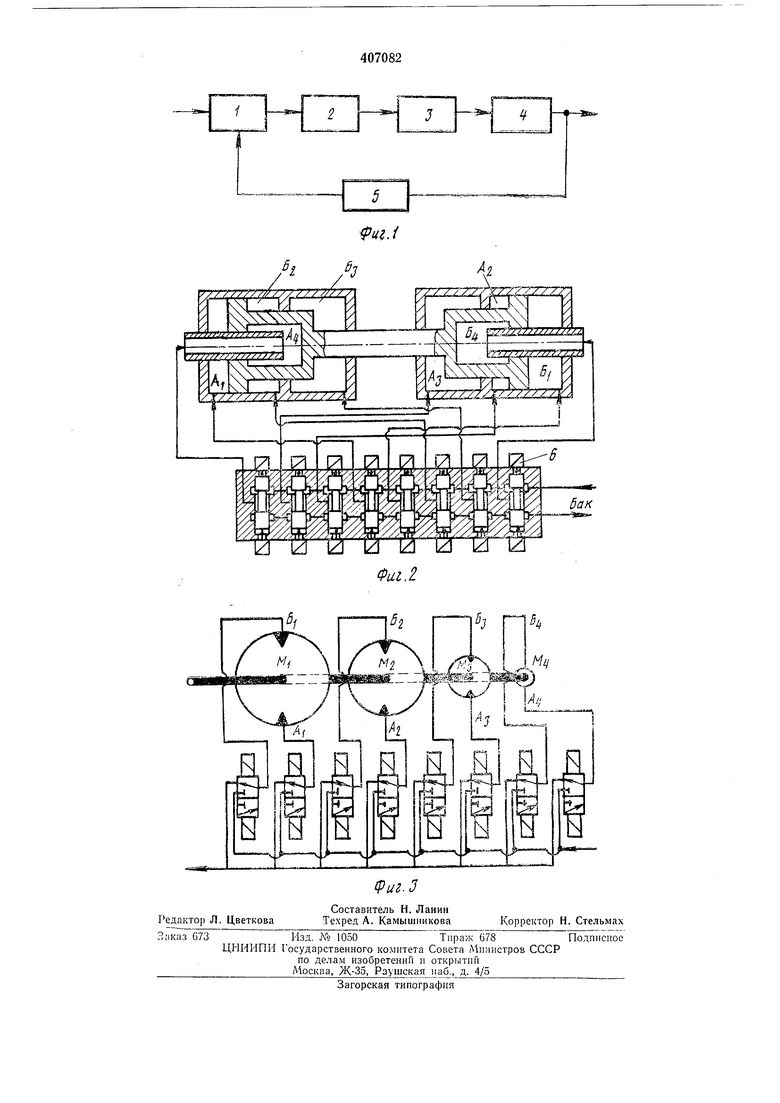
На фиг. 1-3 представлены схемы системы и блоков.
На фиг. 1 изображена структур:ная блоксхема электрогидравлической цифровой следящей с1Н1Стемы, которая содержит блок сравнения 1, блок цифрового преобразования 2, электропидраеличеок.ий цифровой регулятор 3, многосекциааный гидродвнгатель 4, устройство обратной связи 5.
На фиг. 2 представлен вар1иант схемы млтогосвкционного гидродвигателя ноступателыюго действия - гидроцилиндра, а также схема исполнительной частн электрогидравличеокого цифрового регу.тятора из восьми золотниковых распределителей с электромагнитным унравле1 :ием. Схема содержит секции ноложительного направления движения AI-А, секции отрицательного направления BI-64 и толкающие электромагииты 6.
На фиг. 3 пр|Иведен вариа нт схемы миогосекцно1гного гидродв нгателя ротационного действия - гргдромотора, а также аиалогичиая ноказаиной па фиг. 2 схема исполиительной частн электропидравлического цифрового регулятора, где - отдельиые секци;и гндромотора; Л;-А - магистрали, подключение которых к насосу приведет к положительному нанравлению вращения выходного вала; - магистрали, подключение которых к насосу приведет к отрицательному направлению вращения выходного вала.
В качестве блока сравнения использован обычный реверсивный счетчик; блок цифрового ПреобразО( 2 состоит из дешифраторов положительного и отрицательного приращений реверсивного счетчика блока сравнения и диодных матриц.
В режиме слежения система работает следующим образом.
Сигналы ирограммы и обратной связи поступают на входы блока сравнения / (фиг. 1), где в цифровом виде фор;мируется сигнал рассогласования. Блок цифрового преобразования 2 «опрашивает блок сравиеция на некоторой постоянной несущей частоте и переносит в параллельно.м коде сигнал рассогла-сования на вход электродной части элекпрогидравллческого цифрового регулятора . Электрогидравлическнй цифровой регулятор подключает к нерегулируемому иасосу (к магистралям сл:ива и нагнета1Ш- я) такую цифровую комбиатцию секций многосекционного двигателя, которая соответ ствует сигналу рассогласовакия, в результате чего и текущая скорость многосекциониого двигателя будет соответствовать сигналу рассогласоваНия. Двигатель перемещает исполл1ительный орган, который связан с той или иной системой обратной связи по пололсеН1ИЮ.
На фиг. 2 показана 1схема реверсивного четырехсекцио-нного гидроцили1ндра и схема управления секциями при помощи электрогидравлического цифрового регулятора. Гидроцилиндр 1СОСТОИТ из четырех секций А положительного направления движения и четырех секций Б отрицательного направления движения. Каждая секция может быть подключена к 1нанорной магистрали нерегулируемого насоса, либо соединена со с помощью одного из восьмИ электрогидравличеоких двухпозиционных дискретных усилителей, составляющих в своей совокупности электрогидравлнчоскнй цифровой регулятор; геометрические параметры и рабочие площади отдельных секций подобраны таким образо:м, что различаются в цифровом коде, .например двоичным. КоМб ИН:ируя включением сепщий, модсно установить для четырехсекциоиного гидроцнлиндра 15 различных рабочих площадей, что позволяет реализовать 15 фиксирова.нпых скоростей движе1Н ия с насосом постоян 11ой производительности. Важнейшей особенностью расс.мотренного здесь цифрового гидравлического двнгателя является чрезвычайно высокое быстродействие его управляющей части. З лотннки электрогидравлического цифрового регулятора могут переключаться за 0,001 сек при таком
открытии щелей, которое обеспечивает режим, близкий к насыщению по расходу. Это позволяет назначать высокую несущую частоту работы цифрового гидродвигателя - порядка 100 ГЦ.
На фиг. 3 показана схема ротационного варианта четырехсекционного гидродвигателя, состоящего из четырех гидромоторов с общим валом, рабочие нодачи которых разл1ичаются в соответствии с какиМ-Л1ибо цифровым кодом,
например двоичным. Электрогидравлические двухпозиционные дискретные усилнтели, входящие в элекррогидравлический цифровой регулятор, позволяет соединить любую из восьми магистралей четырехсекционного гидродвигателя с напорной линией нерегулируемого иасоса нли с баком. В результате некоторой комбинации установки золотников регулятора создается определенная комбинация включения рабочих секций гидродвигателя. Текущая окорость гидродвигателя при этом определится суммариым значением его рабочей подачи, зависящей от выбранной комбинации. Для четырехсекциониого гидромотора можно установить 15 вариантов рабочей подачи, что позволяет реализовать 15 фиксированных скоростей вращения с насосом постоянной производительности.
Предмет изобретения
Электрогидравлическая цифровая следя1цая система, содержащая последовательно соединенные блок сравнения, цифрового
преобразования, электрогидравлический цифровой регулятор с золотинками электромагнитного управления и гидродвигатель, выход которого через -устройство о&ратной связи подключен к входу элемента сравнения, отличаюимяся те.м, что, с целью упрон ения устройства, гндродвигатель выполнен миогосекциоиным с общим выходным валом, приче.м секции соединены с магистралями слива и нагнетания через золотниКи электрогидравлического цифpoiBoro регулятора, а геометр ическпе размеры секций выполнены в соот1ветствии с соотношением 1:2:4:8.
| название | год | авторы | номер документа |
|---|---|---|---|
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| УНИВЕРСАЛЬНАЯ ГИДР&СИСТЕМ.4 СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1971 |
|
SU307755A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| Устройство цифровой гидравлической системы с прямым цифровым управлением | 2022 |
|
RU2802159C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |