1
Изобретение относится к часовой технике и может быть иснользовано в автономных приборах времени или в первичных часах систем единого времеии.
Известны устройства для компенсации неизохронности маятникового осциллятора, вызванной нелинейностью восстанавливающего момента, содержащие лружинный подвес из трех расположенных в одной плоскости и соединенных между собой пружин, из которых средняя длиннее боковых. Перемещением этой пружины вдоль продольной оси подвеса регулируют изохронность маятникового осциллятора.
Однако известное устройство характеризуется сложностью процесса формирования компенсационной кривой.
Целью изобретения является упрощение формирования компенсационной кривой.
Для этого на свободном конце щтанги маятникового осциллятора закреплен якорь, взаимодействующий с дополнительной магнитной системой, выполненной в виде криволинейных полюсных наконечников, соединенных постоянным магнитом, и создающей нелинейность, компенсирующую нелинейную составляющую восстанавливающего момента.
Изобретение пояснено чертежом.
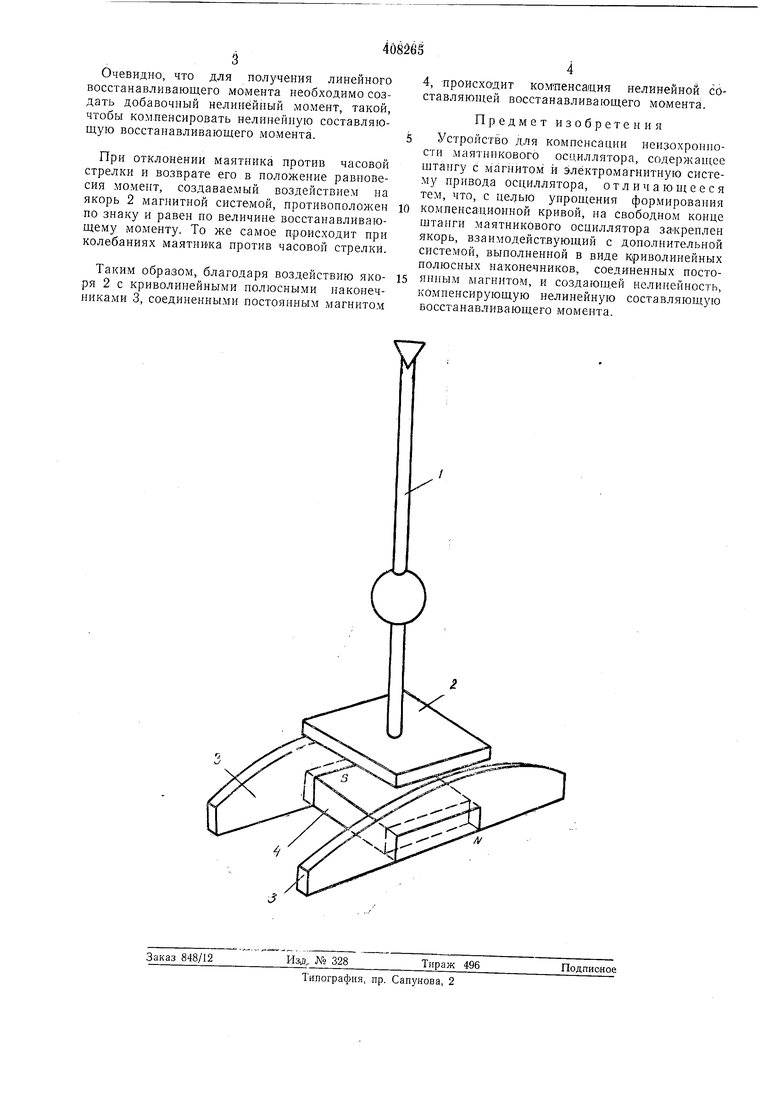
На чертеже приведена схема устройства.
Устройство для компенсации неизохронности маятникового осциллятора содержит штангу маятника 1, на сводном конце которой за1кренлен якорь 2 из магнитомягкого мате|риала, а на плите (не показана) криволинейные полюсные наконечники 3, соединенные постоянным магнитом 4.
Известно, что колебания маятника без учета потерь энергии описываются уравнением
- G,(1)
где ф - угол отклонения маятника от положения статического равновесия, /-момент инерции маятника, k - статический момент маятника.
Откуда период колебания маятника запишется как
г,2.-|/4 1+1;«Ч тУ 1(2)
где Ф - амплитуда маятника,
а - ...(2п - ) 2-4-6...2л
Из формулы (2) видно, что период То зависит от амплитуды Ф, т. е. колебания маятника неизохронны.
Очевидно, что для получения линейного восстанавливающего момента необходимо создать добавочный нелинейный момент, такой, чтобы ком.пенсировать нелинейную составляющую восстанавливающего момента.
При отклонении маятника против часовой стрелки и возврате его в положение равновесия момент, создаваемый воздействием на якорь 2 магнитной системой, противоположен по знаку и равен по величине восстанавливающему моменту. То же самое П:роисходит при колебаниях маятника против часовой стрелки.
Таким образом, благодаря воздействию якоря 2 с криволинейными полюсными наконечниками 3, соединенными постоянным магнитом
4, происходит компенсация нелинейной составляюн 1:ей восстанавливающего момента.
Предмет изобретения
Устройство для компенсации неизохронности маятникового осциллятора, содержаи(ее штангу с магнитом и электромагнитную систему привода осциллятора, отличающееся тем, что, с целью упрощения формирования компенса-ционной кривой, на свободном конце штанги маятникового осциллятора закреплен якорь, взаимодействующий с дополнительной системой, выполненной в виде криволинейных полюсных наконечников, соединенных постоянным магнитом, и создающей нелинейность, компенсирующую нелинейную составляющую восстанавливающего момента.
V7
V
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2313100C1 |
| ВПТБ | 1973 |
|
SU405100A1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441247C1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| Длиннопериодный вертикальный сейсмометр | 1977 |
|
SU712790A1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2020 |
|
RU2795114C2 |
| Маятниковый магнитометр | 1972 |
|
SU440627A1 |
