1
Изобретение относнтся к области автоматики.
№ 140112 известен
По основному авт. св. способ коррекции систем автоматического регулнрования, согласно которому нроизводится изменение структуры САР в период переходного процесса в функции знаков сигнала до н после элементов САР, нодлежащих коррекций.
Предлагаемый способ отличается тем, что к основному сигналу, при разных знаках сигналов до н носле элементов системы, подлежащих коррекцни, добавляют сигнал, пропорциональный производной регулируемой величины в моменты времени, когда скорость регулирующего устройства отличгт от пуля.
Это позволяет повысить точность регулирования при сохранении иомехоустойчнвостн.
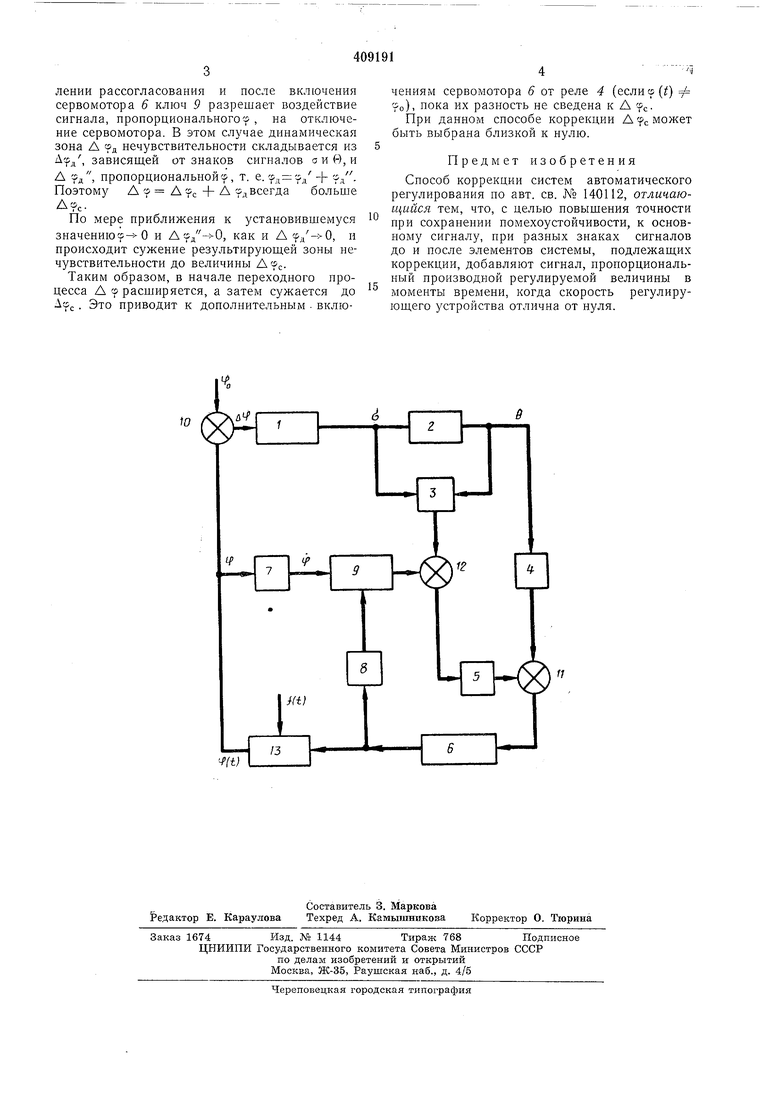
Па чертеже представлена блок-схема системы, реализующей нредлагаемый способ.
Система содержит усилитель 1, фильтр 2, знакочувствительный элеме 1т 3, реле 4 и 5, еервомотор 6, дифференциаторы 7 и 8, ключ 9, сумматоры 10, 11 и 12 н объект /5 регулирования.
Для обеспечения требуемых фильтруюш.нх свойств релейной системы с нснолмительным серводвигатсле.м постоянной скорости по отношенню к случайным возмущенням /(/) в систему вводится фнльтр 2. Однако это значнтел1,-но ухудн1ает дннамнческне и статические качества системы.
Благодаря Корректирующей цепи со знакочуветвнтельиым элементом 3 сигнал поступает на реле 5, минуя фильтр 2. Реле 5 действует только па отключение сервомотора 6.
Полную зоиу нечувствительности Л системы можно условно разбить на две составляющие: статическую , определяемую фиксированнымн параметрамн реле 4, п динамическую Ард, определяемую вред1енем действня реле 5.
Реле 5 действует только в нереходпом режнме, н его роль cocToirr в раснифеннн зоны нечувствнтелыюсти на величину , т. е. Аср Afc-b А гд.
При отсутствии сигнала ъ (ключ 9 не )азренгает прохождение сигнала) зона нечувствительности увеличивается в функции знаков сигналов о и (-) на входе и выходе фильтра 2. Такая коррекция позволяет отключать сервомотор 6 раньше, чем к этому приводит размыкание контактов реле 4. По мере приближения к установившемуся состоянию реле 5 отключает сервомотор реже, так как зиаки сигналов о н (-при t --о совпадают. Результирующая зона Д f нечувствительности становится равной статичес ой н может быть зафиксироваиа.
Согласно предла аемому снособу прп НОЯБлении рассогласования и после включения сервомотора 6 ключ 9 разрешает воздействие сигнала, пропорциональногоf , на отключение сервомотора. В этом случае динамическая зона Л срд нечувствительности складывается из Afa, зависяш;ей от знаков сигналов о и В, и Л 9д, пропорциональной р, т. е. срд срд+ 9д Поэтому А 9 Л с + « всегда больше
.
По мере приближения к установившемуся
значению - О и , как и , н происходит сужение результирующей зоны нечувствительности до величины AfcТаким образом, в начале переходного процесса А «расширяется, а затем сужается до Асре . Это приводит к дополнительным включениям сервомотора 6 от реле 4 (если® (г) 9о), пока их разность не сведена к А «,,.
При данном способе коррекции А f. может быть выбрана близкой к нулю.
Предмет изобретения
Способ коррекции систем автоматического регулирования по авт. св. № 140112, отличающийся тем, что, с целью повышения точности при сохранении помехоустойчивости, к основному сигналу, при разных знаках сигналов до и после элементов системы, подлежащих коррекции, добавляют сигнал, пропорциональный производной регулируемой величины в моменты времени, когда скорость регулирующего устройства отлична от нуля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления сервомотором рабочего колеса поворотно-лопастной турбины | 2014 |
|
RU2614232C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ | 1971 |
|
SU318907A1 |
| Регулятор | 1979 |
|
SU824133A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Способ определения прямых показателей качества регулирования промышленных автоматических систем | 1988 |
|
SU1580323A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
to
(t)
