1
Изобретение относится к портальным газорезательным машинам, работающим или по принципу масштабного фотокопирования по чертежу или по заданной программе, или к машинам с копированием по металлическому шаблону.
Оно может быть использовано для скоростной прямолинейной газовой кислородной резки листового матери1ала, а также для вырезки деталей с большим радиусом кривизны в разных отраслях промышлеиности.
Известные машины, содержащие смонтированный iB направляющих плавающий суппорт с резаком, установленный с возможностью перемещения при взаимодействии с датчиком, не обеспечивают плавного изменения угла наклона резака с сохранением постоянного расстояния от резака до обрабатываемой поверхности.
Для плавного изменения угла наклона резака с сохранением постоянного расстояния от резак-а до обрабатываемой поверхности в предлагаемой машине суппорт выполнен в виде приводной штанги, установленной с возможностью поворота вокруг своей оси в плоскости, параллельной обрабатываемой поверхности и жестко связанной с резаком и датчиком, оси перемещения которых размещены под углом друг к другу, при этом ось перемещения датчика проходит через ось вращения
приводной штанги и наклонена к обрабатываемой поверх1юстп под углом не менее 60. Кроме того для обеснечен 1я работы одним резаком, оси перемещения датчика и резака
размещены в одной плоскости, а для обеспечения работы несколькими резаками оси перемещения резаков и датчиков размеп ены в разных плоскостях.
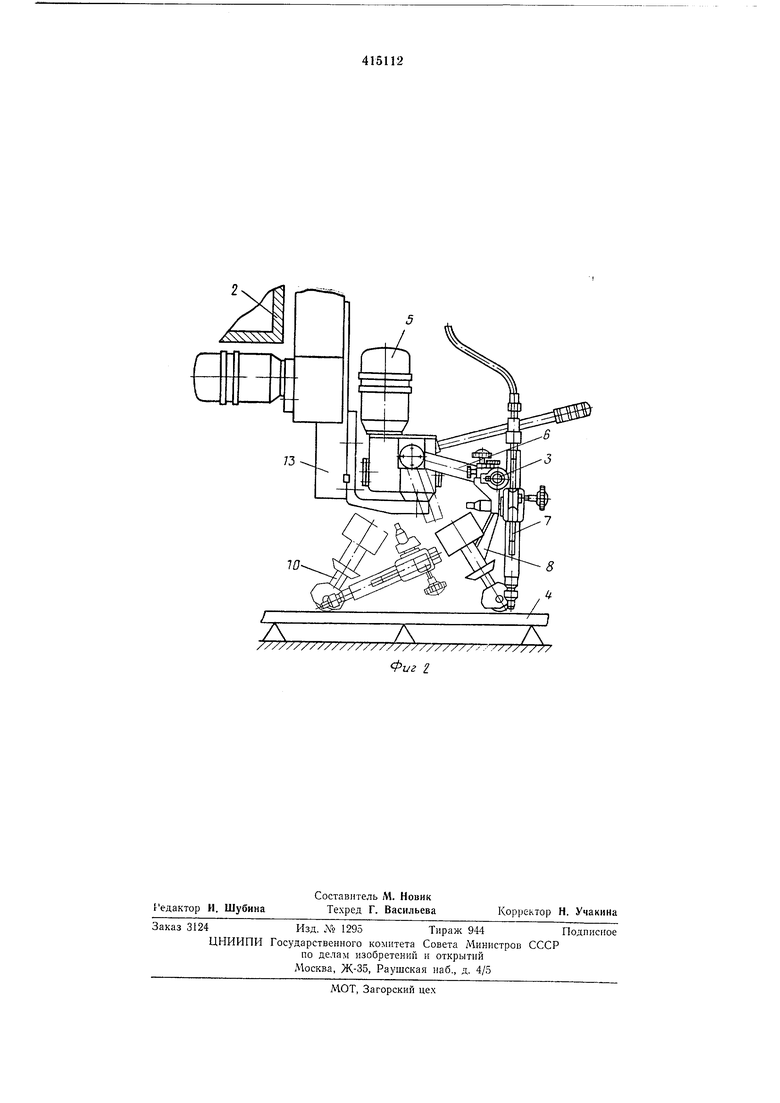
На фиг. 1 изображена кинематическая схема поворотного устройства описываемой маHJHHbi; на фиг. 2-общий вид суппорта сбоку. Плавающий суппорт / смонтирован в направляющнх 2 портала (на чертеже не показан).
Суппорт содержит щтангу 3, имеюп ую возможность вращения в плоскости, параллельной обрабатываемой поверхности 4. Привод штанги 3 осуществляется от редуктора 5, На штанге 3 жестко закреплены рычаги 6, в кокоторых установлены резаки 7. Резак 7 в случае необходимости прн настройке системы может перемещаться в осевом направлении относительно рычага 6. Угол наклона резака 7 к поверхности 4 составляет 25°
К рычагу 6 прикреплен рычаг 8, на котором укреплена втулка 9. Втулка 9 может быть прикреплена непосредственно к штанге 3.
Во втул-ке 9 свободно перемещается ось 10
с датчика.ми //. Датчики // постоянно прижаты пружмион 12 к поверхности 4. В верхнем положении, когда суппорт приподнят над листом и датчики не касаются листа, ось 10 с датчиками // удерживается от выпадепия специальным стопором. Ось втулки 9 всегда проходит через ось вращения пгтанги 5.
К оси 10 крепят один либо два датчика //, перекатывающиеся по поверхности 4.
Когда на каждый резак устанавливают свой индивидуальный датчик, па оси 10 крепят два датчика 11, причем датчики располагают по разные стороны от линии реза (по разиые стороны от резака). В случае, если иа штапге 3 установлено три резака 7, то датчики располагают между резаками, и иа оси 10 крепят только одии датчик //. В первом случае оси перемещения датчика и резака 7 иаходятся в одной плоскости и пересекаются между собой, а во втором случае их оси находятся в разных плоскостях и перекрещиваются в одной точке.
Ось 10, перемещающаяся во втул1се 9, имеет на коппе толкатель 13, которьи нажимает при работе на нижний контакт 14 либо иа верхний контакт 15, расположеииые по разпые стороны от толкателя.
Штаига 5 со всеми элементами закреплена на ползуне 16 и может поворачиваться относительно вертикальной осп 17. Ползун 16 может перемепдаться вертикально в паправля опл,их роликах 18, установленных на суппорте /.
Машина работает следующим образом.
При Вращении щтанги 5 рычаг 6 с резаком 7 поворачивается. Радиус поворота равен расстоянию от оси щтанги 3 до поверхности 4. При этом возможно заклинивание резака 7 в поверхности 4 и его полом.ка. Для предотвращения этого и поддержания необходимого для падежной устойчивой работы расстояиия от торца мундщтука до поверхности 4 служит датчик плавающего суппорта.
При повороте пггангп 3 (от 25 до 90°) датчики 11 катятся по поверхности 4. Так как расстояние (по радиусу) от оси щтанги 3 до поверхности 4 меняется, то ось 10 вместе с датчиками 11 перемещается во втулке 9, и толкатель 13 нажимает на контакт 15, который дает сигнал на включение двигателя вертикального подъема, п система поднимается вверх. Прулсина 12 толкает ось 10 с датчиком 11 вниз, контакт 15 размыкается и подъем прекращается. Так как вращение штанги 5 происходит непрерывно до тех пор, пока угол наклона резака 7 не изменится от 25° до 90°, то соответственно постоянно подаются сигналы от контакта 15 на двигатель вертикального подъема. Двигатель вертикальиого подъема отрабатывает вверх до тех пор, пока ось датчика не стаповится перпендикулярной к поверхности 4. После этого радиальное расстояние от оси щтангп до поверхности 4 начинает увеличиваться, пружина 12 прижимает толкатель 13 к нижнему
контакту 14, который начинает выдавать сигнал на опускание ползуна 16.
Этот процесс длится до тех пор, пока резак 7 не станет под углом 90° к поверхности 4, после чего, соответствующий контакт выключает двигатель, обеспечивающий вращение штанги 3, и система готова к работе. В этот момент подают кислород и подогревающую газокислородпую смесь, начинается пробивка отверстия.
По достижении устойчивого процесса горения металла по всей толщине разрезаемого листа подается сигнал на вращение щтангп в противоположном -направлении, угол подъема уменьшается (от 90° до 25°). Крайние положення фиксируются концевыми выключателями (контактами), на которые поочередно нажимает рычаг, закрепленный на щтанге (на чертел е не показан).
Для предотвращения заклинивания оси 10 во втулке 9 необходимо, чтобы угол, образованный осью датчика п поверхпостью 4, был не менее 60°. Поэтому точка пересечепия оси датчика и резака 7 в рабочем положепии резака взята не на поверхности 4, а несколько выще.
После достиження угла атаки 25° поворот щтанги 3 прекращается, подается сигнал на привод продольного перемещения (иа чертеже не показап), и начинается рез металла. При таком полол еппи резака происходит раскрой листа на полосы па проход. В том случае, если необходимо вырезать карты, то при подходе к месту поворота (поперечного реза) резаки 7 разворачивают так, чтобы они стояли под углом 90° к поверхности 4. Затем разворачивают штангу 3 с резаками 7 и всей системой на 90° относительно оси 17, после чего процесс начинают с поперечном направлеиии апалогичным способом. Исключение состоит в том, что в этом случае движется суппорт, а пе портал.
В процессе резки возможна внезапная остановка датчика 11, контакт 15 замкнется, но двигатель вертикального подъема может пе успеть поднять суппорт. Поэтому вводится дополнительное устройство, обеспечивающее резкую остановку мапшны (на чертеже не показано).
Когда резка осуществляется несколькими (тремя) резаками, датчики располагаются между пими. В этом случае возможен вариант работы, когда один датчик дает сигнал на подъем, а второй-на опускание. Система управления двигателем вертикального перемещения построена так, что перемещение вверх происходит, если сигнал на движение вверх поступает даже с одного датчика, а движение вниз - только при наличии сигнала па движение вниз со всех датчиков.
Применение предполагаемого изобретения позволяет в l,5-t-2,5 раза повысить производительность газокислородной резки металла.
Предмет изобретения
1. Газорезательная машина, содержащая смонтированный на раме плавающий суппорт с резаком, установленный с возможностью перемещения при взаимодействии с датчиком, отличающаяся тем, что, с целью плавного изменения угла наклона резака с сохранением постоянного расстояния от резака до обрабатываемой поверхности, суппорт выполнен в виде приводной штанги, установленной с возможностью поворота вокруг своей оси в плоскости, параллельной обрабатываемой поверхности, и жестко связаБной с резаком и датчиком, оси перемещения которых размещены под углом друг к другу, при этом ось перемещения датчика проходит через ось вращения приводной щтанги и наклонена к обрабатываемой поверхности под углом не менее 60°.
2.Газорезательная мащина по п. 1, отличающаяся тем, что, с целью обеспечения работы одним резаком, оси перемещения датчика и реза-ка размещены в одной плоскости.
3.Газорезательная мащина по п. 1, отличающаяся тем, что, с целью обеспечения работы несколькими резаками оси перемещения резаков и датчиков размещены в разных плоскостях.


| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для термической резки листов | 1979 |
|
SU872086A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1981 |
|
SU1002180A2 |
| УСТРОЙСТВО для ОБРЕЗКИ КРИВОЛИНЕЙНБ1Х КРОМОК ИЗДЕЛИЙ | 1972 |
|
SU346049A1 |
| ШАРНИРНАЯ ГАЗОРЕЗАТЕЛЬНАЯ МАШИНА | 1973 |
|
SU398365A1 |
| Устройство для термической резки | 1974 |
|
SU564113A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1982 |
|
SU1074760A2 |
| Устройство для совмещения оси вращения резака с центром отверстия,вырезаемого в стенке полого цилиндрического изделия | 1965 |
|
SU255758A1 |
| Устройство для отделения литников от стальных отливок | 1980 |
|
SU893434A1 |
| УСТРОЙСТВО для ФАСОННОЙ РЕЗКИ ТРУБ | 1972 |
|
SU335053A1 |
| Установка для термической резки труб на кольца | 1987 |
|
SU1511036A1 |
..N
f
N
-4:
JBI/
. I / /
Ш/ J-.
С
14- W 11
TV
/
TV
TV
