(54) УСТРОЙСТВО ДЛЯ ОКОНТУРОВКИ СТЫКУЕМЫХ ЭЛЕМЕНТОВ КОРПУСА СУДНА
Изобретение относится к области судостроения, в частности к устройствам для оконтуровки стыкуемых элементов корпуса судна.
В основном изобретении по авх. св. № 612844 описано устройство для оконтурювки стыкуемых элементов корпуса судна, содержащее прибор, задающий плоскость оконтуровки, состоящий из прожектора и фотоэлектрического приемника, тележку с приводом, снабженную вьщвижной штангой, на которой установлены фотоэлектрический приемник и подпружиненные газорезательные головки, причем устройство снабжено подвижной несущей опорой, на которой установлена .тележка и привод вертикального и гори- зонтально1х перемещения тележки, а газорезательные головки установлены на двух опорных роликах, при этом на тележке установлены фотоэлектрическая след5пдая система, датчики угловых и линейных перемещений газорезательных головок, связанные с приводами вертикального и горизонтального перемеще- , ния тележки и следящей системой, связанной с прожекторюм и фотоэлектрическим приемником, а напротив прожектора установлена визирная марка.
Недостатком такого устройства являются ограниченные функциональные возможности из-га невозможности оконту- ровки с заданной точностью криволинейных корпусных конструкций, образующие
10 которых имеют наклон к продольной оси, так как изменяется расстояние между соплом резака и оконтуровываемой поверхностью (воздушный зазор) и угол наклона резака, и как следствие, практически
5 линия реза выходит за пределы теоретической линии реза на величину, большую, чем допускается стандартом.
Цель изобретения - расширение функциональных возможностей устройства.
20
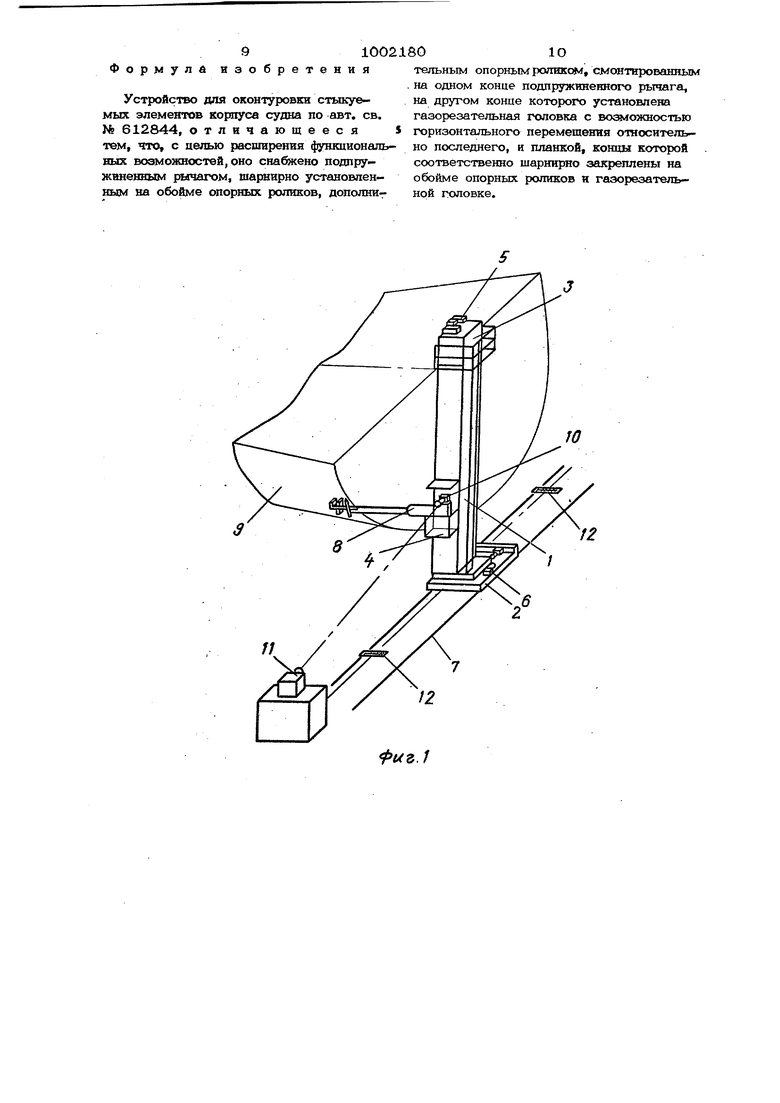
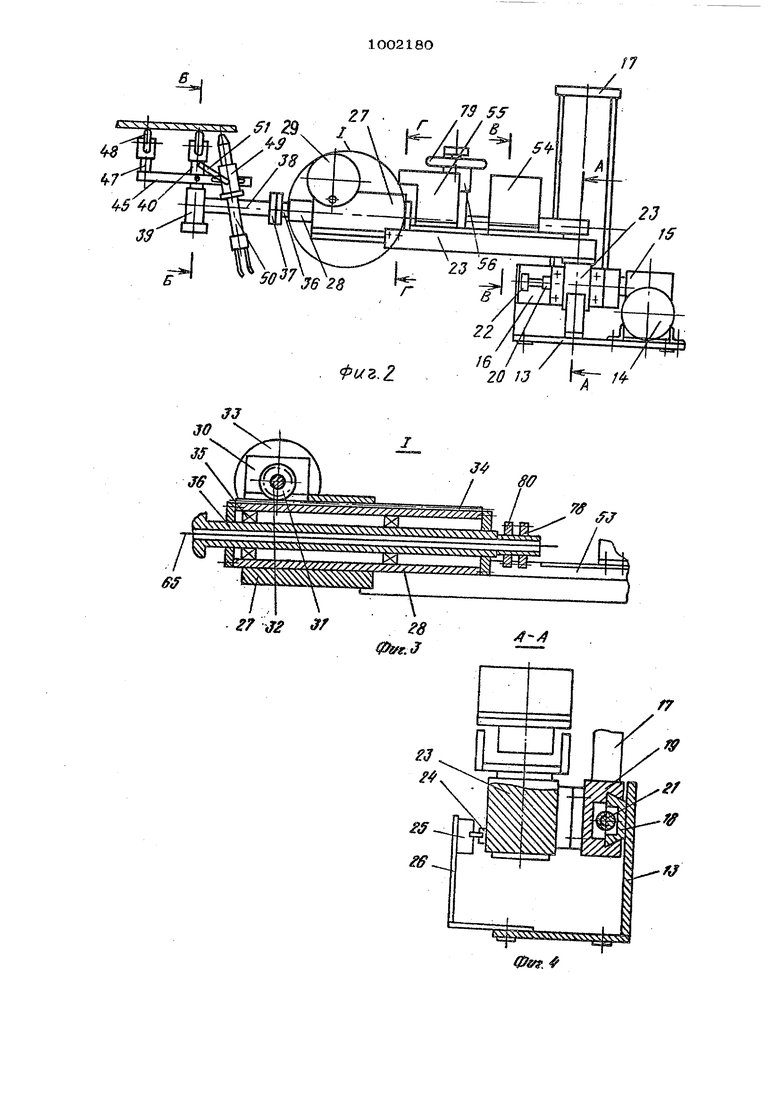
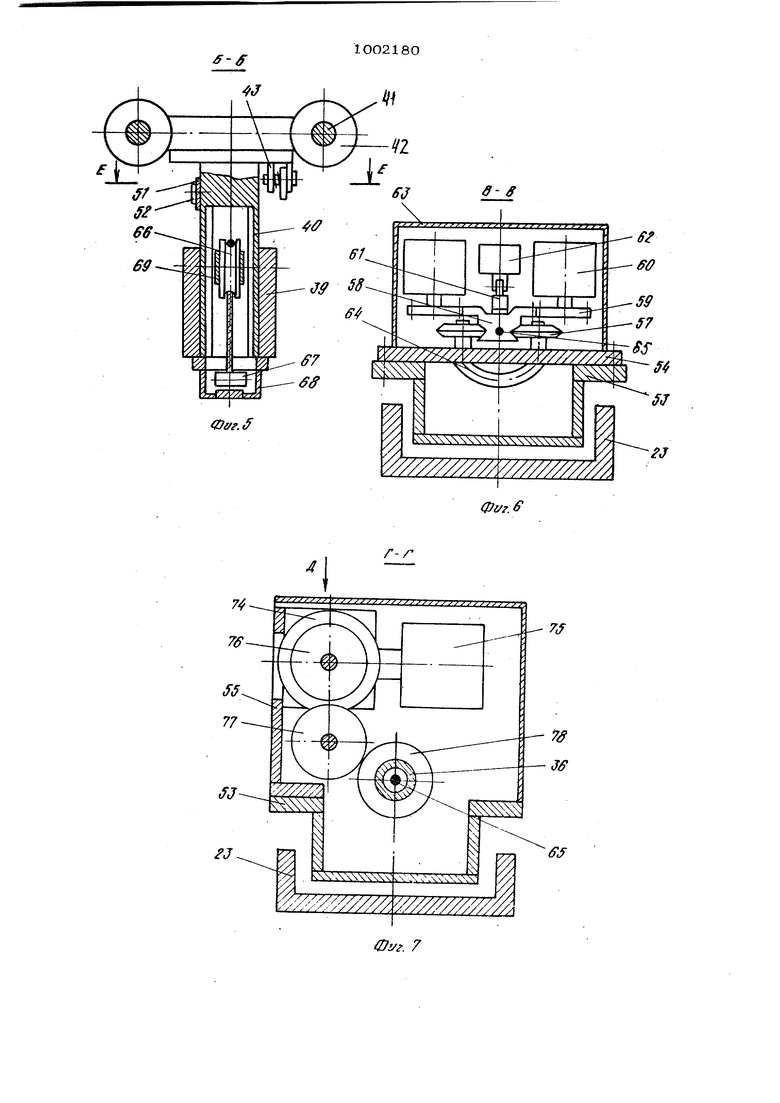
Цель достигается тем, что устройство для оконтуровки стыкуемых элементов корпуса судна по авт. св. Ns 612844 снабжено подпружиненным рычагом, шар3i0Н1ФНО установлезшым на обойме опорных роликов, дополнительным опорным роликом, смонтированным на одном конце под прр1силенного рычага, на другом конца которого установлена газорезательная головка с возможностью горизонтального перемещения относительно последнехю, и планкой, конды которой соответственно uiapHHlJHO закреплены на обойме опорных роликов н газорезательной головке. На фиг. 1 изображено устройство для оконтуровки стьшуемых элементов корпуса судна, общий вида на фиг. 2 - выдвижная штанга; на фиг, 3 - узел I на фиг, 2; на фиг. 4 - сечение на фиг. 2; на фиг, 5 - сечение Б-Б на. ф)1г. 2; на фиг, 6 - сечение В-В на фиг. 2; на фиг, 7 - сечение Г-Г на , 2j на фиг, 8 - вид Д йа фиг. 7; на фиг, 9 - сечение Е-Е на фиг, 5, Устройство для оконтуровки стыкуемы элементов корпуса судна содержит подвил ную несущую опору 1 (см. фиг. 1), вьшол ненну о в виде самоходной тележки 2, на которой установлена коло1ша 3, На колон не 3 смонтирована телеяска 4, вьшолненная в виде кабины. Тележка 4 имеет возможность вертикального перемещения поколонне 3 с помощью привода 5 вертикального хода, а также горизонтального перемещения совместно с колонной 3 и самоходной теленской 2. с помощью привода 6, установленного на самоходной тележке 2. Самоходная тележка 2 перемещается по рельсовым направляющим 7, На тележке 4 смонтирована выдвижная штанга 8, контактирующая с обрабатываемым блоком 9 Корпуса судна. На выдвиж ной штанге 8 установлен фотоэлектрический следящий приемнтпс 10, связанный фотоэлектрической следящей системой с прожектором 11, установленным на (позицией не обозначена). Элементы фотоэлектрической следящей системы установлены на фотоэлектрическом приемнике 10 и прожекторе 11 Напротив прожектора 11 установлены 1визир ные марки 12, предназначенные для установления светового потока прожектора 11. Вьщвияшая штанга 8 включает опорный кронштейн 13 (см. фиг. 2), на котором установлены электродвигатель 14, червячный редуктор 15, механизм 16 коррегшии стойку 17. Механизм 16 коррекции вьшолнен в виде направляющей 18 (см. фиг. 4), жестко закрепленной на опорном кронштейне 13 каретки 19, установленной с возможностью продольного перемещения 04 по направляющей 18 в результате взаимодействия гайки 20 (см. фиг. 2), жестко соединеююй с кареткой 19 (см. фиг. 4), и винта 21, смонтированного ё подшипниках 22 (сМо фиг, 2) и жестко соединенкого с червячным редуктором 15, С кареткой 19 (см. фиг. 4) жестко соединен корпус 23, Для oгpaн rчeш я перемещения корпуса 23 в продольном направлении предназначен упор 24, контактирующий с выключателем 25, закрепленным на кронщтейне 26. Корпус 23 вьтолнен пустотелым и жестко Связан с направляющей втулкой 27 (см. фиг, 2), в которой Смонтирована с возможностью продольного перемещения пустотелая штанга 28, Для продольного перемещения штанги 28 предназначен зубчато-реечный механизм 29, вьшолненный в виде корпуса ЗО (см. фиг. 3), жестко соединенного с ЗЕ1аправляющей втулкой 27, щестерни 31, жестко установленной на оси 32, пртчем ось 32 подвижно с возможностью поворота смонтирована в корпусе ЗО и жестко соединена с маховиком 33. Шестерня 31 входит в зацепление с зубчатой рейкой 34, жестко закрепленной на пустотелой щтан- ге 28. В пустотелой штанге 28 на подщиг никах 35 качения смонтирован пустотелый вал 36, жестко связанный муфтой 37 (см, фиг, 2) с пустотелой осью 38, которая в свою очередь жестко на с вертикально расположенной направляющей втулкой 39. Во втулке 39 (см. фиг, 5) смонтирована с возможностью вертикального перемещения обойма 40, в которой подвижно, на осях 41, установлены опорные ролики 42. На обойме 40 жестко закреплена вилка 43 (см. фиг. 9), в которой подвижно, на оси 44, смонтирован рычаг 45, поджик1аемый пружиной 46. На рьщаге 45 (см. фиг, 2) жестко установлена вилка 47 с подвижным опор- ным роликом 48 и подвижно, с возможностью льнейного перемещения в пазу (позицией не обозначен) - газорезательная головка 49 с резаком 50, Газорезательная головка 49 и обойма 40 связаны между собой планкой 51, которая крепится к головке 49 и обойме 40 шарнирно с помощью осей 52 (см. фиг. 5). Пустотелая штант а 28 (cw. фиг. 3) жестко связана с кронштейном 53, на котором смонтированы датчики 54 линейных перемещений (см. фиг, 2), датчик 55 угловых перемещений, механизм 56 поворота вала 36. Датчики линейных перемещений 54 и угловых перемещений 55 электрически связаны с приводами вертикального 5 (см. фиг. 1) и горизон тального 6 перемещений тележки 4 и предназначены для обеспечения постоянн го усшгая поджатия к срабатываемой по верхности опорных роликов 42 (см. фиг, 5) для -обеспечения постоянства скорости резания. Датчик 54 линейных перемещений (см, фиг. 6) выполнен в виде смонтиров ной с возможностью продольного переме щения в направляющих роликах 57 зубчатой рейки 58, входящей в зацепление с шестернями 59, жестко посаженными на валах (позицией не обозначены) датчиков 60, Для ограничения хода зубчат рейки 58 в продольном направлении пре назначен упор 61, .жестко связанный с зубчатой рейкой 58 и контактирующий с выключателем 62, Датчики 6О закрыты кожухом 63, Зубчатая рейка 58 одним концом связана с пружиной 64, а другим - с тросиком 65, который проходит через вал 36 (см, фиг, 3), огибает подвижный шкив 66 (см, фиг. 5) и- жестко крепится планкой 67 к нижней части 68 обоймы 4О, Шкив 66 подвижно закреплен в вшпсе 69, жестко закрепленной на направляющей втулке 39 (см, фиг. 2), Датчик 55 угловых перемещений (фиг. 7, 8) вьшолнен в виде пустотелого корпуса 7О (см, фиг, 8), в котором на подшипниках 71 качения подвижно смонтирован вал 72, жестко связанный с кулачками 73 и валом (позицией не обозначен) датчика 74, Кулачки 73, контактирующие с вьпслючателями 75 (см, фиг, 8), предназначены для ограничения угла поворота вала 36 (см. фиг. 3 На валу датчика 74 жестко посажена шестерня 76, входящая в зацепление с паразитной шестерней 77 (см. фиг. 7), которая в свою очередь входит в зацепл ние с шестерней 78, жестко посаженной на валу 36 (см, фиг, 3), Механизм 56 поворота (см. фиг. 2) предназначен для настроечного поворота вала 36 (см, фиг, 3) и в конечном счёте опорных роликов 42 (см. фиг, 5) и вьшолнен в виде маховика 79 (см, фнг, 2), жестко соединенного зубчатыми передачами (позициями не обозначены) с шестерней 80 (см, фиг, 3), жестко закрепленной на валу 3 6, Стойка 17 (см, фиг, 2) жестко уста 1ювлена на каретке 19 (см, фиг, 4) и предназначена для крепления фотоэлектрического приемника 1О (см. фиг, 1), Устройство работает следующим образом. Блок 9 корпуса судна устанавливается в стапельное положение. Прожектор 11 наводят на визирные марки 12 таким образом, чтобы направление световогоj потока прожектора 11 было параллельно базовой плоскости блока 9 корпуса суда. Включением и ручным управлеггаем риводов 5 и 6 подводят подвижную неущую опору 1 в исходное положение до оприкосновения опорных роликов 42 и 8 с оконтуровываемой поверхностью лока 9. Перед соприкосновением опорные олики 42 и 48 предварительно развораивают с помощью механизма 56 пово- ота на угол, соответствующий углу одъема криволинейной оконтуровываемой оверхности блока 9. Вращение от махош а 79 через зубчатые передачи (позициями не обозначены), шестерню 8О передается валу 36, оси 38, налравляюще;й втулке 39 и обойме 40, в которой .установлены опорные ролики 42. Рычаг 4 5 при соприкосновении опорного ролика 48 с оконтуровЬюаемой пове-рхностью блока 9 занимает положение, параллельное оконтуровываемой поверхности, и обеспечивает необходимый возщгщ-. ный зазор между соплами резака и окон- туровьтаемой поверхностью. Величину обрабатываемого припуска устанавливают продольным перемещением пустотелой штанги 28 с помощью зубчатореечного механизма 29, Для этого поворачивают маховик 33, вращение от которого передаетсяна ось 32, шестерню 31, рейку 34, Шт.нга 28 выдвигается совместно с валом 36, осью 38, обоймой 40, опорными роликами 42 и газорезательной головкой 49, которая смещается относительно существующей кромки оконтуровываемой поверхности блока 9 на величину, задаваемую чертежом. Фотоэлектрический приемник 10, уста новленный на стойке 17, вводят в световой поток прожектора 11 перемещением стойки 17 совместно с кареткой 19 и . корпусом 23, для чего включают двигатель 14, приводящий во вращение червячный редуктор 15 и винт 21, взаимодействующий с гайкой 20 каретки 19, Таким образом осуществляется ввод и корректировка положения фотоэлектрического приемника 10 относительно прожектора 1L Затем фотоэлектрическую следящую систему (лозшгией не обозначена) переводят в режим авахэматт-гческого отслеживания, при происходит взаиглосвязанное автоматическое перемещение прожектора 11 и приемника 10 в плоскости реза. После этого газорезательной головкой 49 производят оконтуровку кромки блока 9 корпуса судна в автоматическом режиме. При движении газорезательной головки 49 вдоль оконтуровываемой поверх ности опорные ролики 42 ударж1шают га- зорезательную головку 49 с резаком SO по нормали к обрабатываемой поверхности, а опорный ролик 48, поворачивая че рез рычаг 45 газорезательную головку 49, обеспечивает постоянный воздушный зазор мелдцу соплом резака 50 и обрабаты ваемой поверхностью, а постоянны угол наклона резака 50 к обрабатьшаемой поверхности. При- движении вдоль оконтуровываемой поверхности опорные ролики 42, копируя указанную поверхность, поворачиваются совместно с обоймой 40 и валом 36 относительно штан- ги 28. Вращение вала 36 через шестерни 78, 77, 76 передается на датчик 74 угловых перемещений, который воздейст нует на приводы вертикального 5 и гори зонтального 6 перемещений, обеспечивая постоянную линейную скорость перемеще кия газорезательной головки 49 относительно оконтуровываемой поверхности. При продольном угле, например 180 .поворота вала 36 срабатьтает переключа тель 75, который останавливает двилсение опоры 1. Если по кшсой-то причине опорные ролики 42 уменьшают или увеличивают усилие поджатия к оконтуровываемой поверхности (это происходит при измв нении уг-ла подъема оконтуровываемой поверхности в плоскости, параллельной плоскости светового потока прожектора 11), то изменяется положение обоймы 40 относительно втулки 39. Поскольку обойма 4О посредством тросшса 65 свя,зана с рейкой 58, то при перемещении обой.мы 4О перемещается и рейка, воздействующая через шестерни 59 з-ш даТ чики 60j/ 1соторые подают корректирующи сигналы на приводы вертикального 5 и горизонтального 6 перемещений, в резул тате чего происходит соответствующее изменение горизонтальной и вертикаль- ной скорости перемещения телелжи 4 и обеспечивается посто5шное поджатие опорных роликов 42 к оконтуровываемой поверхности. Приемник 1О при проведении оконтуровки удерживает горизонтальную головку 49 в плоскости оконтуровки, задаваемой прожектором 11. В случае изменения наклона образук шей оконтуровьшаемой-поверхности по отношению к продольной оси блока 9 (изменение угла подъема оконтуровьгоаемой поверхности в плоскости вертикально перпендикулярной плоскости светового потока прожектора 11), например при оконтуровке усеченных (кормовых или носовых) корпусных конструкций,изменяется и наклон рычага 45, который, поворачиваясь на оси 44, под действием пружины 46 прижимает опорный ролик 48 к оконтуровьюаемой поверхности. При этом изменяется и положение связанной с рычагом 45 газореза тельной головки 49, которая сохраняет постоянным заранее заданное расстояние от сопла ре- Зс1ка 50 до оконтуровываемой поверхности (воздушный зазор)... Сохраняется также первоначальный нагшон оси резака 50 к оконтуровьшаемой поверхности. При повороте рычага 45 также происходит продольное перемещение газо- резательной головки 49 относительно паза (позицией не обозначен), поскольку газорезательная головка 49 связана посредством закрепленной на осях 52 планкой 51 с обоймой 4О, что обеспечивает автоматический возврат резака 50 в плоскость реза. По окончании оконтуровки опору 1 перемещают в исходное состояние., Таккм образом, устройство для окончуровки стыкуемых элементов корпуса судна обеспечивает оконтуровку с заданной точностью ( ± 1мм) криволинейных корпусных конструкций, образующие которых имеют наклон к продольной осн. Задатшя точность гарантируется тем, что в процессе оконтуровки обеспечивается постоянство воздушного зазора между соплом резака и оконтуровываемой .поверхностью, сохраняется первоначаль- :кый угол наклона оси резака и оконтуровываемой поверхности н осуществляется автоматический возврат резака в плоскость реза. Предлагаемое изобретение обеспечивает расширение номенклатуры обрабатьтае- мых, изделий, а именно оконтуровку кор.мовых и носовых оконе шостей корпуса судна, что в конечном счете сокращает цикл постройки судна, повышает производительность труда.
Формула изобретения
Устройство для оконтуровки стыкуемых элементов корпуса судна по авт. св. № 612844, отличающееся$
тем, что, с целью расширения функциональных возможностей, оно снабжено подпружш1енным рычагом, шарннрно установленным на обойме опорных роликов, дополниг
тельным опорным роликом, смонтированным на одном конце подпружиненного рычага, на другом конце которого установлена газорезательная головка с возможностью горизонтального перемещения относительно последнего, и планкой, концы которой соответственно шарнирно закреплены на обойме опорных роликов и газорезательной головке.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1978 |
|
SU740592A2 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1982 |
|
SU1074760A2 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1975 |
|
SU612844A1 |
| УСТРОЙСТВО ДЛЯ ОКОНТУРОВКИ СТЫКУЕМЫХ ЭЛЕМЕНТОВ | 1973 |
|
SU380520A1 |
| Устройство для обрезки по контуру стыкуемых элементов корпуса судна | 1981 |
|
SU965874A1 |
| Устройство для термической обрезки стыкуемых кромок листовых конструкций | 1982 |
|
SU1082572A1 |
| Стенд для контуровки корпусных конструкций | 1983 |
|
SU1100187A1 |
| Устройство для обрезки стыкуемых элементов корпуса судна | 1975 |
|
SU529916A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1980 |
|
SU990577A1 |
| Стенд для вырезки клиньев из профильного проката | 1977 |
|
SU659305A1 |

. фиг.2. I
ia t liKMWVOXXX VV4VV liVk.V4
Ф&9. 2Q /J
Фг/г.
Фг/г.
Г-Г
ЛГ
Ф:/г. 7
фуг. 8
Фиг.
