1
Изобретение относится к области автоматики и контрольно-измерительной техники и может быть использовано для контроля группы следящих систем, выходным элементом которых служит исполнительный вал.
Известны устройства для контроля следящих систем синусоидальным сигналом, содержащие Б своем составе стимулирующий генератор.
Однако в известных системах формируемая синусоида имеет искажения либо для формирования синусоидального сигнала иснользуются дополнительные электромеханические устройства.
С целью устранения этих недостатков в предлагаемом устройстве между вьлходом усилителя и обмоткой управления двигателя одной из следящих систем введена схема коммутации и управления, выходные обмотки ВТ-приемНика и СКВТ-датчика соединены последовательно, а вторые выводы этих обмоток через схему коммутации н управления подключены ко входу введен-ной в устройство пороговой схемы регистрации. Причем выход источника питания СКВТ-датчика нодключен к СКВТ-датчику через регулятор установки амплитуды сигнала.
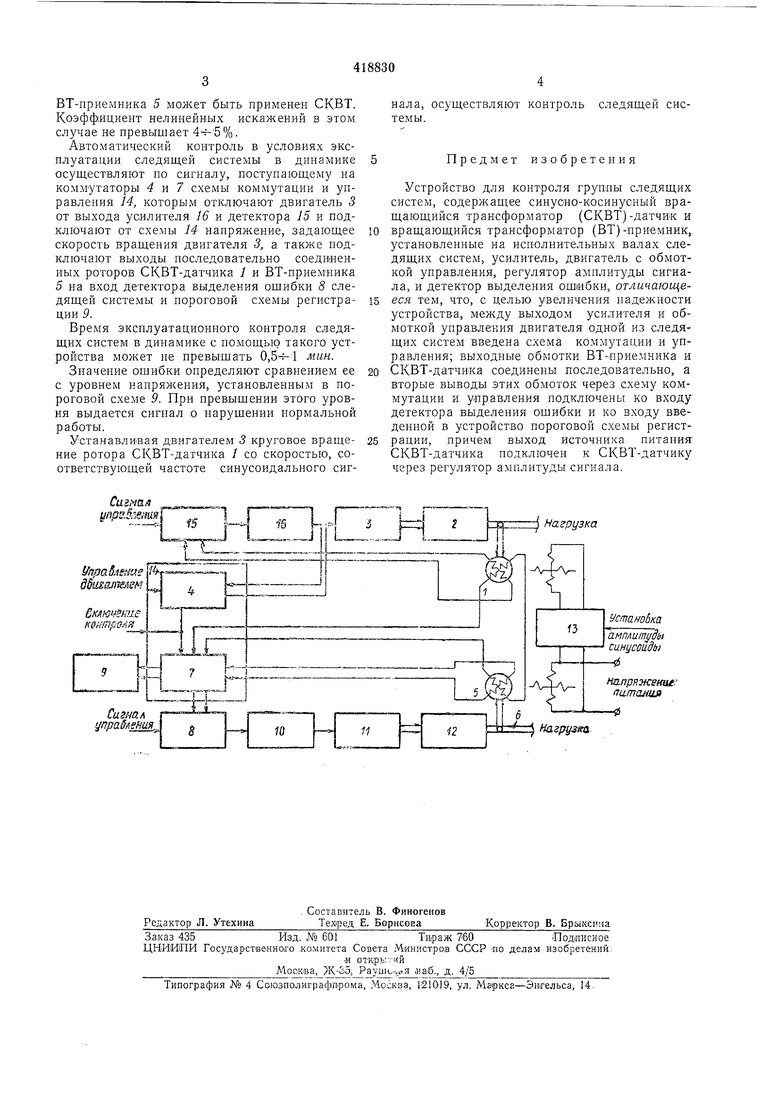
На чертеже изображена функциональная схема устройства.
Ротор СКВТ-датчика 1 через редуктор 2
приводится 30 вращеппе двигателем 3. К обмотке двигателя через оммугагор 4 иодпед/но напряжение, регулирующее скорость его вращения. Один вывод ротора СКВТ-даг ка / прнсоединеп к ротору ВТ-)рпемн ;ка 5, устаповлениому на исполнительном валу 6 следящей системы. Вторые вьгводы роторов через коммутатор 7 подключепы на входы дегс1чтора выделения 8 следящей системы и пороговой схемы регистрации 9. Сигнал оглюки с детектора 8 через усн.;ич-ель 10 поступг ет на управ.ченпе Д15игателем //. Двнгатель // соединен через редуктор 12 и исполпительикй D с :1Ягрузкой.
Началь:1ым Г|0;:о}л:ен к-м jioropa С ВГ-датчика / является угол, при которол н;-;: 1я 1 емие на роторе мики 1алы10. Пш; iiOiiCpOTe ротора СК13Т-д;Т1М 1-;а / на угол 90° Н :1ря ке:|; е па нем с ;;с:чс1нью регулятора J3 устпирз.чмиоиот
равным 1-;г;пряже;1;по на роторе ВТ- р-;елг1;1ка 5 при угле его поворота, соответствующем заданной амплитуде синусоидального колебания исиолнительпсго вала 6. Для получения амплигуды синусоидального сигнала, соответствуюгцего угловому колебанию вала 6 следящей системы до 80 при коэффи шеитс иел нейности синусоиды 2%, в качестве ВТ-приемпика 5 примепяют линейный вращающийся трансформатор (ЛВТ). Если угловые колебания вала 6 не нревыщают 30°, в качестве ВТ-приемника 5 может быть применен СКВТ. Коэффициент нелинейных искажений в этом случае не превышает . Автоматический контроль в условиях эксплуатации следящей системы в динамике осуществляют по сигналу, поступающему на коммутаторы 4 и 7 схемы коммутации и управления 14, которым отключают двигатель 3 от выхода усилителя 16 и детектора 15 и подключают от схемы 14 напряжение, задающее скорость вращения двигателя 3, а также подключают выходы последовательно соедийенных роторов СКВТ-датчика / и ВТ-приемника 5 на вход детектора выделения ощибки 8 следящей системы и пороговой схемы регистрации 9. Время эксплуатационного контроля следящих систем в динамике с помощью такого устройства может не превышать 0,5-f-1 мин. Значение ощибки определяют сравнением ее с уровнем напряжения, установленным в пороговой схеме 9. При превыщении этого уровня выдается сигнал о нарущении нормальной работы. Устанавливая двигателем 5 круговое вращение ротора СКВТ-датчика / со скоростью, соответствующей частоте синусоидального сиг„,««.«,„«|--. yfis&§,s,ml f5 fo h mzm™ llllli l/iysa Asms deusofi WM 4 .I ЁХАЮ&ше - rliihi: - Keffff/ps/if „ t/npaSf.sfm следящей сиснала, осуществляют контроль темы. Предмет изобретения Устройство для контроля грунпы следящих систем, содержащее синусно-косинуоный вращающийся трансформатор (СКВТ)-датчик и вращающийся трансформатор (ВТ)-приемник,, установленные на исполнительных валах следящих систем, усилитель, двигатель с обмоткой управления, регулятор амплитуды сигнала, и детектор выделения ощибки, отличающееся тем, что, с целью увеличения надежности устройства, между выходом усилителя и обмоткой управления двигателя одной из следящих систем введена схема коммутации и управления; выходные обмотки ВТ-приемника и СКВТ-датчика соединены последовательно, а вторые выводы этих обмоток через схему коммутации и управления подключены ко входу детектора выделения ошибки и ко входу введенной в устройство пороговой схемы регистрации, причем выход источника питания СКВТ-датчика подключен к СКВТ-датчику через регулятор амплитуды сигнала. --5г--j brcj г ffl Нагрузка l JlJJ I- 1 Ж 4I i I ц , .- I , I на.прязке(ше: питалил r 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2580153C1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
