1
Изобретение относится к кузнечно-прессовому оборудованию.
Известно устройство для подачи заготовок в рабочую зону пресса, содержащее связанные с кривошипным валом пресса посредством механической передачи, снабженной кулачками, захваты, смонтированные в каретке, установлевной на опорах качения.
Одна-ко это устройство обладает недостаточной надежностью работы.
Для повышения надежности работы механическая передача выполнена в виде тяг, связанных посредством рычагов с кулачками, при этом одна из тяг шарнирно соединена с кареткой, а другая прапуш.ена внутри последней и снабжена закрепленными на ней на заданном расстоянии один относительно другого опориымя элементами и ползушками, а также пружинами, установленными на тяге между ползушками и внутренними перегородками, предусмотренными в корпусе каретки, при этом на каждой ползушке закреплен штифт, взаимодействующий своим свободным концом с рычагом, установленным на приводном валу, смонтированным в корпусе каретки и снабженным зубчатым сектором, находящимся в зацеплении с дополнительным зубчатым сектором, закрепленным на дополнительном валу, также установленном в корпусе каретки, а захваты закреплены на приводном и дополнительном валах.
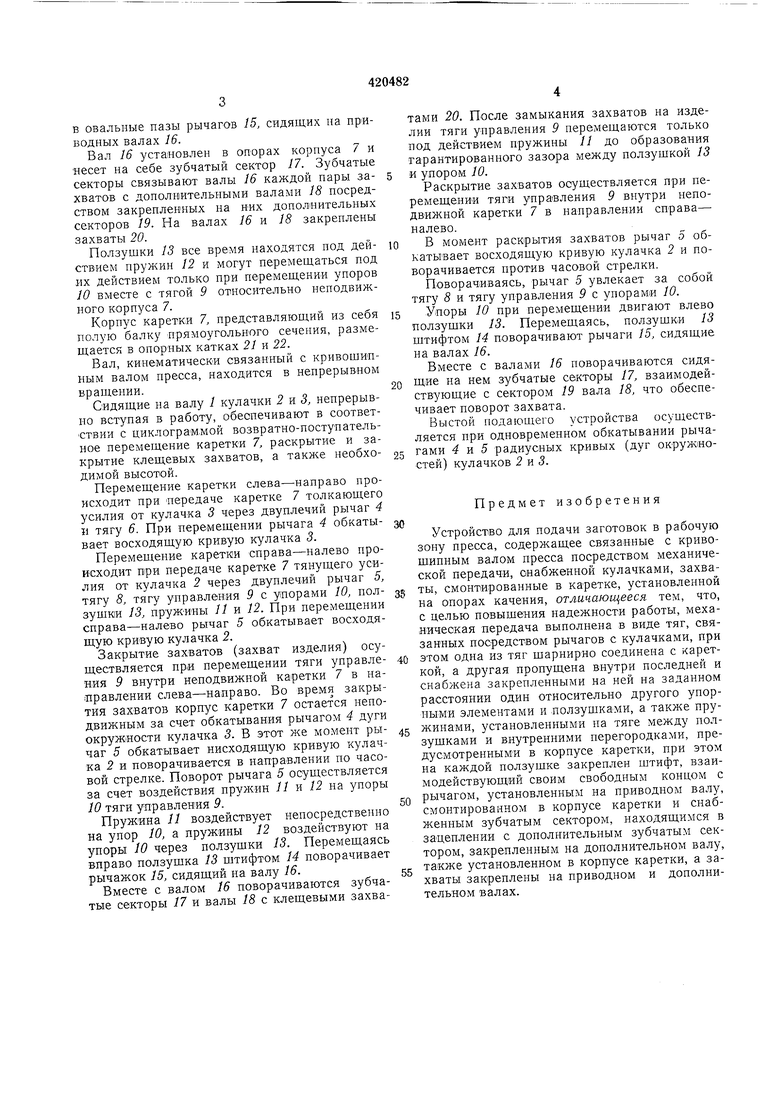
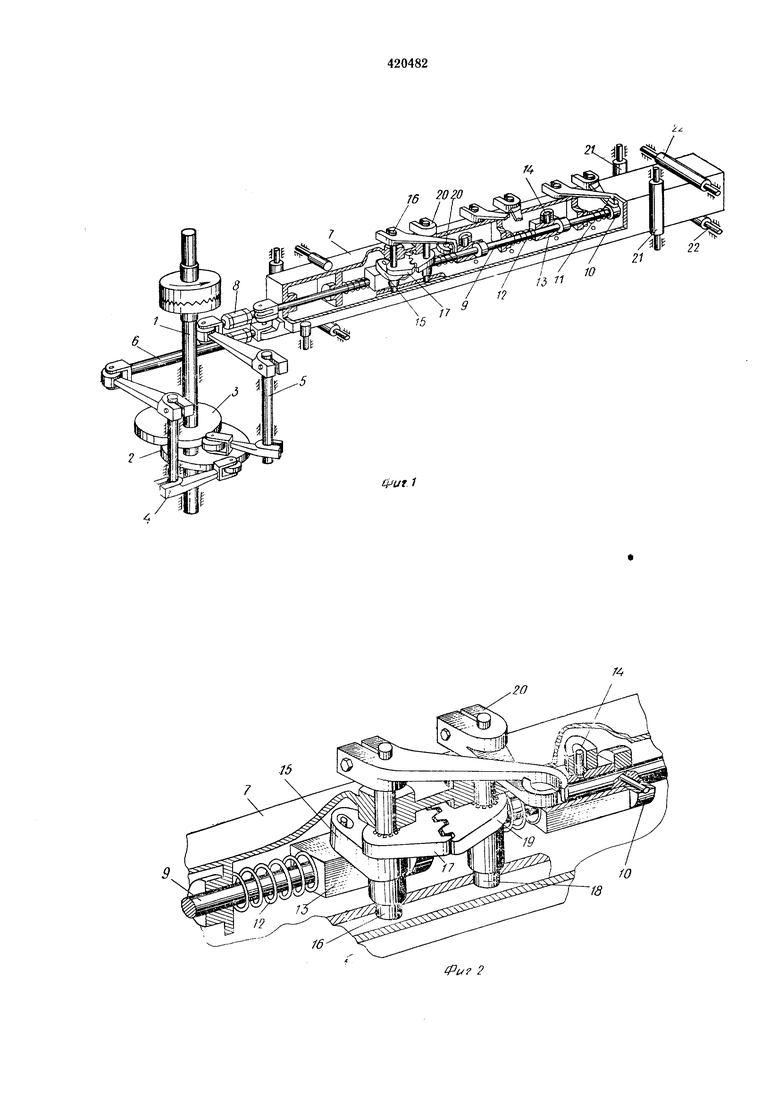
На фиг. 1 показан общий вид устройства; на фиг. 2 - общий вид клещевого захвата с элементами привода; на фиг. 3 - кинематическая схема подающего устройства.
Устройство содержит вал 1, связанный с кривошипным валом пресса, на вал посажены кулачки -2 и 3, контактирующие соответственно с двуплечими рычагами 4 н 5. Рычаг 4 через тягу 6 соединяется с корпусом каретки 7.
Рычаг 5 тягой 8, тягой yпpaiвлeния 9 с упорами 10 также связан с корпусом 7 через пру, жину //. Пружина // надета на тягу управления 9 и установлена между крайним упором 10 и стенкой корпуса каретки 7.
Распорное усилие пружины // через корпус 7 и тягу 6 прижимает рычаг 4 к кулачку 2, а через упор 10 тяги Я тягу 8 прижимает рычаг 5 к кулачку 3.
Таким образом привод устройства образует замкнутую кинематическую цепь с силовым замыканием на кулачки 2 и 5 за счет установки пружины //, что обеспечивает отсутствие люфтов в соединениях элементов кинематической цепи. На тягу управления 9 также надеты пружины 12 и ползушки 13 со штифами 14, Пружины 12 устанавливаются между стенкой
корпуса 7 и ползушками 13. Штифты 14 входят
в овальные пазы рычагов 15, сидящих на приводных валах 16.
Вал 16 установлен в опорах корпуса 7 и несет на себе зубчатый сектор 17. Зубчатые секторы связывают валы 16 каждой пары захватов с дополнительными валами 18 посредством закрепленных на них дополнительных секторов 19. На валах 16 и 18 закреплены захваты 20.
Ползушки 13 все время находятся под дейстанем нружин 12 и могут перемещаться под их действием только при перемещении упоров 10 вместе с тягой 9 относительно неподвижного корпуса 7.
Корпус каретки 7, представляющий из себя полую балку прямоугольного сечения, размещается в опорных катках 21 и 22.
Вал, кинематически связанный с кривощипным валом пресса, находится в непрерывном вращении.
Сидящие на валу 1 кулачки 2 и 5, непрерывно вступая в работу, обеспечивают в соответствии с циклограммой возвратно-поступательное перемещение каретки 7, раскрытие и закрытие клещевых захватов, а также необхоДИМОЙ высотой.
Перемещение каретки слева-направо происходит нри Передаче каретке 7 толкающего усилия от кулачка 3 через двуплечий рычаг 4 и тягу 6. При перемещении рычага 4 обкатывает восходящую кривую кулачка 3.
Перемещение каретки справа-налево происходит при передаче каретке 7 тянущего усилия от кулачка 2 через двуплечий рычаг 5, тягу 8, тягу управления 5 с упорами 10, ползушк1И 13, нруЖИНЫ 11 и 12. При перемещении справа-налево рычаг 5 обкатывает восходящую кривую кулачка 2.
Закрытие захватов (захват изделия) осуществляется при перемещении тяги управления 9 внутри неподвижной ка ретки 7 в направлении слева-направо. Во время закрытия захватов корпус каретки 7 остается неподвижным за счет обкатывания рычагом 4 дуги окружности кулачка 3. В этот же момент рычаг 5 обкатывает нисходящую кривую кулачка 2 и поворачивается в направлении но часовой стрелке. Поворот рычага 5 осуществляется за счет воздействия пружин 11 и 12 на упоры 10 тяги управления 9.
Пружина 11 воздействует непосредствеппо на упор 10, а пружины 12 воздействуют па упоры 10 через ползущки 13. Перемещаясь вправо ползущка 13 штифтом 14 поворачивает рычажок 15, сидящий на валу 16.
Вместе с валом 16 поворачиваются зубчатые секторы 17 и валы 18 с клещевыми захватами 20. После замыкания захватов на изделии тяги управления 9 неремещаются только под действием пружины 11 до образования гарантированного зазора между ползущкой 13 и упором 10.
Раскрытие захватов осуществляется при перемещении тяги управления 9 внутри неподвижной каретки 7 в направлении справа- налево.
В момент раскрытия захватов рычаг 5 обкатывает восходящую кривую кулачка 2 и поворачивается против часовой стрелки.
Поворачиваясь, рычаг 5 увлекает за собой тягу 8 и тягу управления 9 с упорами 10.
Упоры 10 при перемещении двигают влево ползушки 13. Перемещаясь, ползущки 13 штифтом 14 поворачивают рычаги 15, сидящие на валах 16.
Вместе с валами 16 поворачиваются сидящие на нем зубчатые секторы 17, взаимодействующие с сектором 19 вала 18, что обеспечивает поворот захвата.
Выстой подающего устройства осуществляется при одновременном обкатывании рычагами 4 и 5 радиусных кривых (дуг окружностей) кулачков 2 и 3.
Предмет изобретения
Устройство для подачи заготовок в рабочую зону пресса, содержащее связанные с кривошипным валом пресса посредством механической передачи, снабженной кулачками, захваты, смонтированные в каретке, установленной на опорах качения, отличающееся тем, что, с целью повышения надежности работы, механическая передача выполнена в виде тяг, связанных посредством рычагов с кулачками, при этом одна из тяг шарнирно соединена с кареткой, а другая пропущена внутри последней и снабжена закрепленными на ней на заданном расстоянии один относительно другого упорными элементами и ползущками, а также пружинами, установленными на тяге между ползущками и внутренними перегородками, предусмотренными в корпусе каретки, при этом на каждой ползушке закреплен штифт, взаимодействующий своим свободным концом с рычагом, установленным на приводном валу, смонтированном в корпусе каретки и снабженным зубчатым сектором, находящимся в зацеплении с донолнительным зубчатым сектором, закрепленным на дополнительном валу, также установленном в корпусе каретки, а захваты закреплены на приводном и дополнительном валах.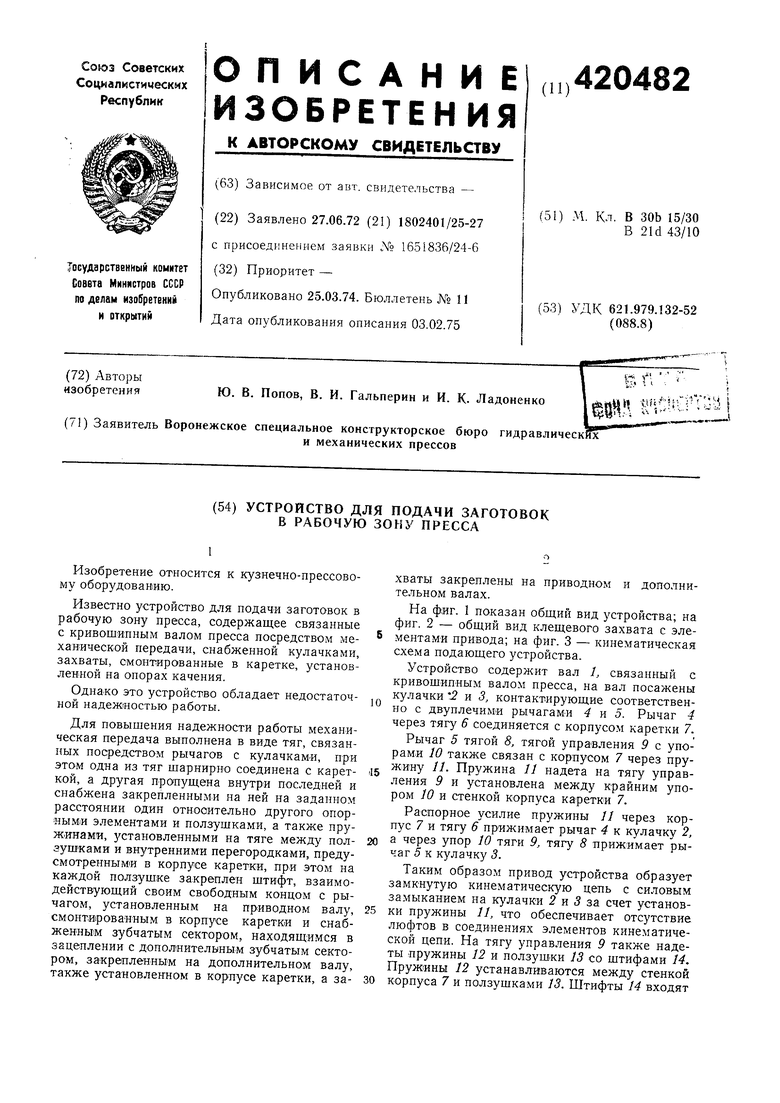
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Устройство Г.В.Зекцера для шаговой подачи длинномерного материала | 1983 |
|
SU1096181A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автомат для сборки радиаторов | 1967 |
|
SU306688A1 |
| УСТРОЙСТВО для ОТРЕЗАНИЯ ЗАГОТОВОК ИЗ КЕРАМИЧЕСКОЙ МАССЫ | 1972 |
|
SU344998A1 |
| Устройство для подачи материала в рабочую зону пресса | 1983 |
|
SU1346305A1 |
L r-T н4ш JO 12rj
