(54) ВИЛОЧНЫЙ ЗАХВАТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват | 1982 |
|
SU1041483A2 |
| Вилочный захват | 1977 |
|
SU647227A1 |
| Вилочный захват подъемно-транспортной машины | 1984 |
|
SU1266836A1 |
| Вилочный захват | 1974 |
|
SU619439A1 |
| Вилочный захват | 1984 |
|
SU1261883A2 |
| Вилочный захват для штучных грузов | 1978 |
|
SU835925A1 |
| Прижимное устройство к вилочному погрузчику | 1985 |
|
SU1291540A1 |
| Захватное устройство для ящиков | 1972 |
|
SU464516A1 |
| Вилочный захват для штучныхгРузОВ | 1978 |
|
SU804565A1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |

Изобретение относится к подъемнотранспортному оборудованиюi в частности для транспортировки тарно-штучных грузов, имеющих различные габаритные размеры.
По основному авт, св. № 647227 известен вилочный захват, содержащий вертикальные стойки с прижимными упорами, горизонтешьную траверсу с упорами. На которой шарнирно закреплены подпружиненные поворотные вилы с откидными рычагами, взаимодействующие с упорами til.
Его недостатком является необходимость ручной перенастройки регулируемых прижимных упоров при захвате грузов различных рамёров.
Цель изобретения - расишрение области применения путем обеспечения захват а грузов различных размеров без дополнительной перенастройки. т
Указанная цель достигается тем, что прижимные упоры закреплены на вертикальных стойках посредством подпружиненных относительно них зубчатых реек, при этом захват снабжен размещенными на вертикальных стойках направляющими и расположенными в них, взаимодействующими с рейками фиксаторами, соединенными нижними
своими концами с вилами, выполненными в виде двуплечих рычагов.
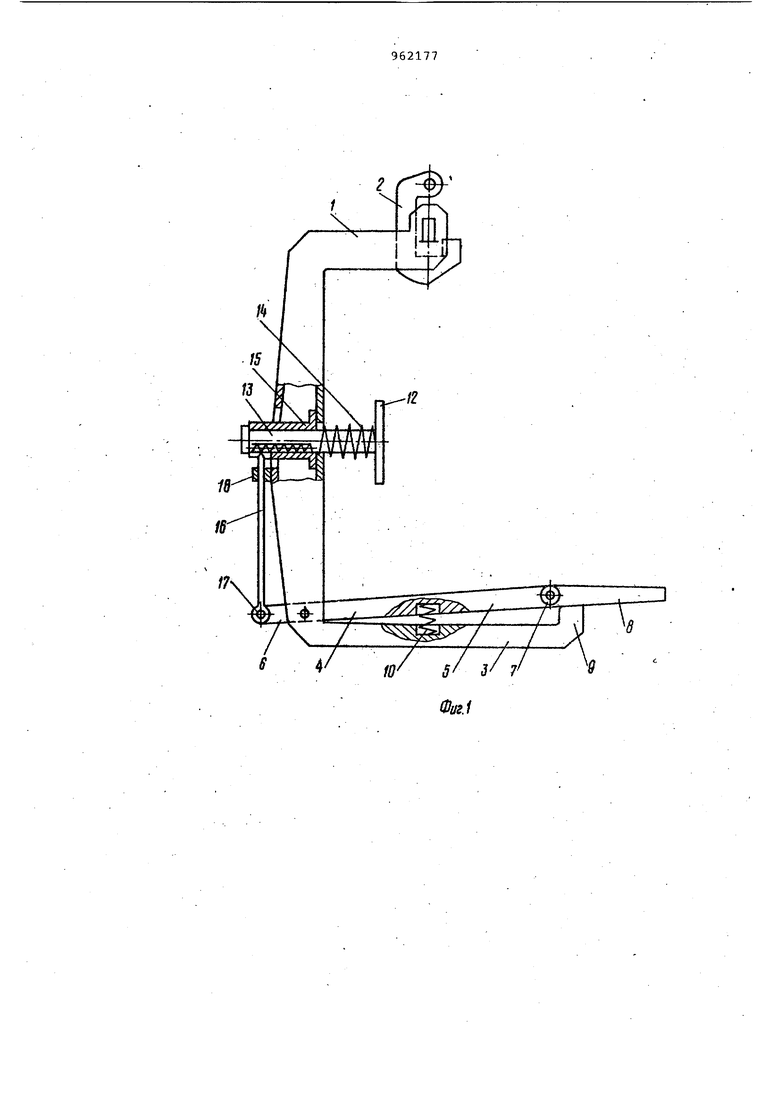
На фиг. 1 показан предлагаемый захват в незагруженном положении; на фиг. 2 - то же, с грузом.
Захват содержит две парал.пельные стойки 1, жестко связанные между собой и навешиваемые на крюк 2, Например, мостового крана. В нижней
10 части стойки несут траверсу 3, на которой шарнирно закреплены вилы 4, .выполненные в виде двуплечих рычагов , имеющих плечи 5 и 6. К плечам 5 посредством шарниров 7 крепятся
15 откидные рычаги 8, которые взаимодейсЗ вуют с упорами 9 траверсы 3,
В средней части вил 4.установлен ны пружины 10, контактирующие с траверсой 3,
20
Для обеспечения возможности транспортировки грузов 11, имеющих различные габаритные размеры, в средней части вертикальных стоек захватов
25 расположены прижимные упоры 12, установленные на подпружиненных в сторону захватываемого груза зубчатых рейках 13 пружинами 14, расположенных в горизонтальных направ30ляющих 15,
С рейками 13 взаимодействуют фиксаторы 16, закрепленные на плечах 6 с помощью шарниров 17, и находя1циеся в направляющих 18.
Для работы захвата необходима боковая поверхность А груза,
Захват работает следующим образом,
В незагруженном состоянии вилы 4 приподняты пружинами 10, плечи 5 вил и шарниры 7 занимают крайнее верхнее положение выше упоров 9, а плечи 6 с шарнирами 17 - крайнее нижнее положение. При этом рычаги 8 |под действием собственного веса занимают горизонтальное положение, фиксаторы 16 введены из зацепления с зубчатыми рейками 13 и прижимные упоры 12 под действием пружин 14 выдвинты внутрь захвата,
Захват подводят под стоящий на подставках груз 11, сжимая пружину 14, и ориентируют его так, чтобы боковые поверхности груза располагалис между упорами 9 и 12, .
атем захват поднимают. Груз onyc кается на вилы 4 траверсы 3, пружины 10 при этом сжимаются, шарниры 7 опукаются вниз, рычаги 8, контактируя с упорами 9 траверсы 3 поворачиваются в сторону груза. При этом захват ориентируется относительно груза под действием подпружиненных упоров 12,
После достижения шарнирами 7 и 17 крайних положений, фиксаторы 16 входят в зацепление с зубчатыми рейками 13, осуществляя фиксацию прижимных упоров 12 относительно стоек 1, а рычаги 8 занимают вертикальное положение, удерживая груз на вилках захвата.
Разгрузку вилочного захвата производят, опуская груз на подставки, При этом захват опускается ниже груза. Под действием пружин 10 вилы 4 приподнимаются вместе с рычагами 8,Когда шарниры 7 занимают крайнее йерхнее положение, рычаги 8 горизонтёшьное, фиксаторы 16 выходят из зацепления с зубчатыми рейками 13, Захват готов к очередному циклу захвата груза.
Предлагаемый захват позволит осуществлять захват грузов, имеющих различные габаритные размеры, без дополнительной переналадки, что повысит производительность труда и удобство в работе при транспортировке штучных грузов.
Формула изобретения
Вилочный захват по ав, ев, , отличающийся тем, что, с целью расширения област применения путем обеспечения захвата грузов различных размеров без дополнительной перестройки, прижимные упоры закреплены на вертикальных стойках посредством подпружиненных относительно них зубчатых реек, при этом захват снабжен размещенными на вертикальных стойках направляющими и расположенными в ни взаимодействующими с рейками фиксаторами, соединенными нижними своими концами с вилами, выполненныг-ш в виде двуплечих рычагов.
Источники информации, принятые во внимание при экспертизе
1, Авторсгяве свидетельство СССР 647227, кл, В 66 С 1/22, 1977,,
/
4 w
11
