1
Изобретение относится к области дистанциопного управления исполнительными гидравлическими сервомоторами.
Известна электрогидравлическая следящая система, содержащая электромеханический преобразователь входного сигнала, соединенный с гидроусилителем, выход которого подключен к полостям сервомотора, и датчик обратной связи по положению щтока сервомотора. В состав таких систем обычно входит задающее устройство, сигнал которого поступает на элемент сравнения, где алгебраически суммируется с сигналом, поступающим от датчика обратной связи по положению регулирующего органа. Сигнал рассогласования усиливается в усилителе и после усиления поступает в электромеханический преобразователь и -далее - на исполнительный сервомотор, который перемещает регулирующий орган в заданное полол ение.
С регулирующим органом жестко связан датчик обратной связи, вырабатывающий сигнал, пропорциональный фактическому положению регулирующего органа. Однако указанные системы сложны в изготовлении и ненадежны.
В предлагаемой электрогидравлической системе, с целью повыщения надежности работы устройства, выходные обмотки датчика обратной связи соединены с управлющей обмоткой
электромеханического преобразователя, а датчик обратной связи связан со щтоком сервомотора через кинематическую передачу с фрикционом, на ведомой части которого установлены ограничительные упоры.
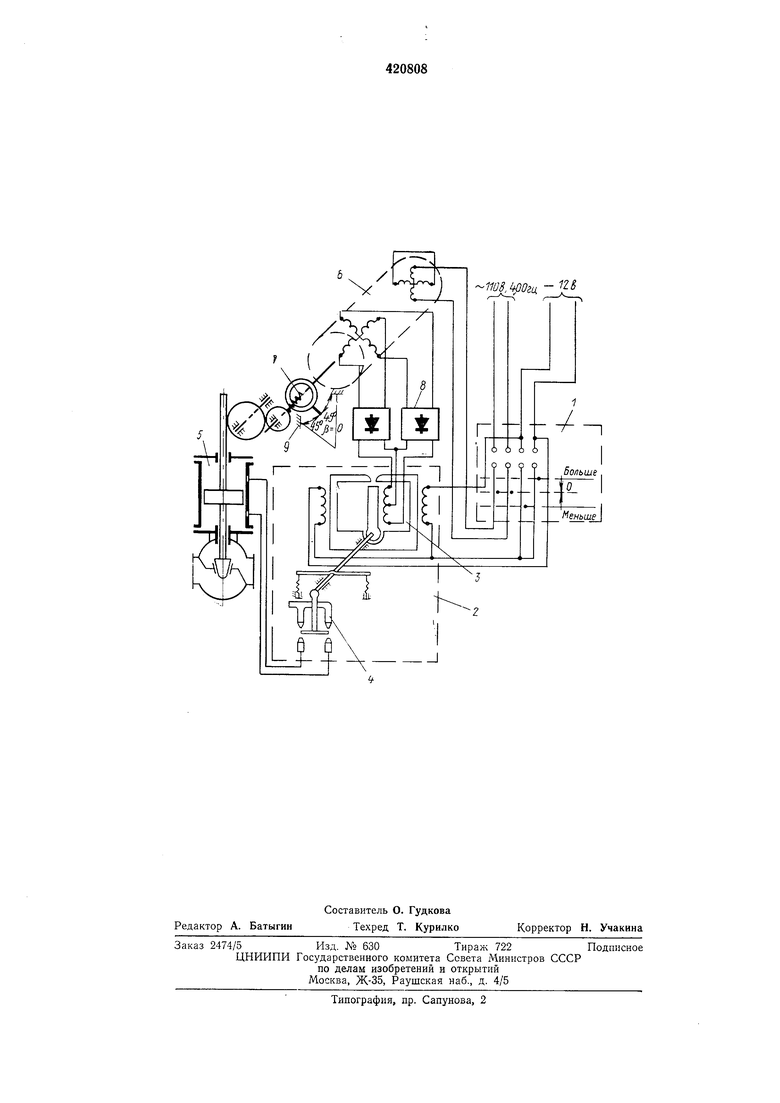
На чертеже представлена схема предлагаемой системы. Система содержит: переключатель 1 управления сервомотором; электромеханический преобразователь с гидроусилителем 2, включающий в себя электромагнитное поляризованное реле 3 и гидравлическое струйное реле 4, приемные сопла которого связаны с полостями сервомотором 5; датчик б обратной связи по положению щтока сервомотора, выполненный, например, в виде сннусно-косинусного вращающегося трансформатора. Ротор его через фрикцион 7 и кинематическую передачу связан со щтоком сервомотора, а каждая из обмоток ротора (синусная и косинусная) соединены через вынрямители 8 с одной из половин управляющей обмотки электромагнитного поляризованного реле 3.
Фрикцион 7 выполнен с упорами 9, ограничивающими разворот ротора датчика 6 углом 90° (Рмакс X ± 45° от среднего положения ротора, когда р 0°, характеризуемого равенством напряжений на синусной и косинусной обмотках датчика обратной связи).
Передаточное отношение кинематической передачи между штоком сервомотора и ротором датчика 6 выбирается таким, чтобы выход ротора датчика на упоры происходил при леремеш:ении штока сервомотора на величину А-Мщакс составляющую незначительную долю (1-5%) от полного хода сервомотора.
Устройство работает следуюш,им образом.
При установке переключателя 1 в одно из крайних положений («Больше или «Меньше) разрывается цепь питания датчика 6 обратной связи по положению штока сервомотора и закорачивается одна из половип поляризующей обмотки реле 3. При этом якорь отклоняется в сторону незакороченной половины поляризующей обмотки. На поршне сервомотора регулирующего органа появляется перепад давления, под воздействием которого поршень сервомотора и регулирующий орган перемещаются в соответствующем направлении. Ротор датчика 6 обратной связи при этом выйдет на какой-либо из упоров 9, и фрикцнои 7 начнет проскальзывать. Это будет продолжаться до тех пор, пока регулирующий орган не достигнет задапного значения, и переключатель не будет возвращен в среднее положение. При этом восстанавливается питание датчика обратной связи и поляризующей обмотки реле 3 и осуществляется автоматическая стабилизация нового положения поршня сервомотора и регулирующего органа.
Поскольку на любом установившемся режиме заслонка струйного реле 4 должна находиться в среднем положении, то должно иметь место равенство напряжений на обеих половинах управляющей обмотки, а следовательно, и на обеих роторных обмотках датчика связи; т. е. любой установившийся режим должен характеризоваться средним положением ротора датчика, соответствующим значению угла
р о.
При самопроизвольном смещении регулирующего органа от заданного положения в какую-либо сторону, например вверх на открытие, ротор датчика развернется на некоторый
угол (не более 45°), напряжение на роторной обмотке увеличится, а напряжение на другой обмотке - уменьщится. Встречно направленные в якоре нреобразователя магнитные потоки обеих половин управляющей обмотки перестанут компенсировать друг друга и в якоре обмотки возникает магнитный поток, пропорциональный по величине разности напряжений роторных обмоток, и направленный так, чтобы его взаимодействие с магнитным потоком
поляризующей обмотки вызвало отклонение якоря влево, а заслонки - вправо. Это вызовет перемещение порщня сервомотора вниз (на закрытие), т. е. в направлении ликвидации возникшего отклонения. При этом ротор
датчика 6 обратной связи также начнет возвращаться в среднее положение, характеризуемое значением Р 0; при этом сигналы на управляющих обмотках преобразователя 3 снова уравновесят друг друга.
гтf
Предмет изобретения
Электрогидравлическая следящая система, содержащая электромеханический преобразователь входного сигнала, соединенный с гидроусилителем, выход которого подключен к полостям сервомотора, и датчик обратной связи по положению штока сервомотора, отличающаяся тем, что, с целью повышения надежности работы устройства, выходные обмотки датчика обратной связи соединены с управляющей обмоткой электромеханического преобразователя, а датчик обратной связи связан со штоком сервомотора через кинематическую передачу с фрикционом, на ведомой части которого установлены ограничительные упоры.
I
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1975 |
|
SU570723A1 |
| Стабилизатор бортовой и килевой качки глиссера с носовым крылом и закрылками | 1973 |
|
SU495229A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТУРБИНЫ | 1972 |
|
SU421785A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ И ЗАЩИТЫ ПАРОВОЙ ТУРБИНЫ | 2010 |
|
RU2450128C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2527640C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО (РЕЗЕРВНОГО) УПРАВЛЕНИЯ | 1968 |
|
SU219655A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ РЕЖИМА РАБОТЫ РОТОРНОГО | 1966 |
|
SU184534A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |