1
Изобретение относится к области аналоговой вычислительной техники.
Известно устройство для моделирования многоканального сервопривода, содержащее в каждом канале последовательно соединенные суммирующий усилитель, первый интегрирующий усилитель, блок умножения и второй интегрирующий усилитель, причем вы.ходы интегрирующих усилителей соединены со входамн суммирующего усилителя, другой вход блока умножения подключен к выходу блока нелинейности, вход которого соединен с переключателем; размыкающий ко ггакт переключателя каждого канала соединен с выходом выходного суммирующего усилителя.
Известное устройство не учитывает влияния взаимодействия каналов и внешней нагрузки иа скорость перемещения выходных элементом каналов сервопривода.
Предложенное устройство отличается тем, что оно содержит блок выбора среднего и последовательно соединенные в каждом канале дополнительный суммирующий усилитель и блок с релейной характеристикой. Выход второго интегрирующего усилителя каждого канала подключен к соответствующему входу блока выбора среднего и к одному из входов дополнительного суммирующего усилителя, другой вход которого соединен с выходом блока выбора среднего. Выход каждого блока с
релейной характеристикой соединен с замыкающим контактом переключателя данпого канала и с одним из в.ходов выходного суммирующего усилителя.
Указанные отличия позволили повысить точность моделирования и расширить функциональные возможности устройства.
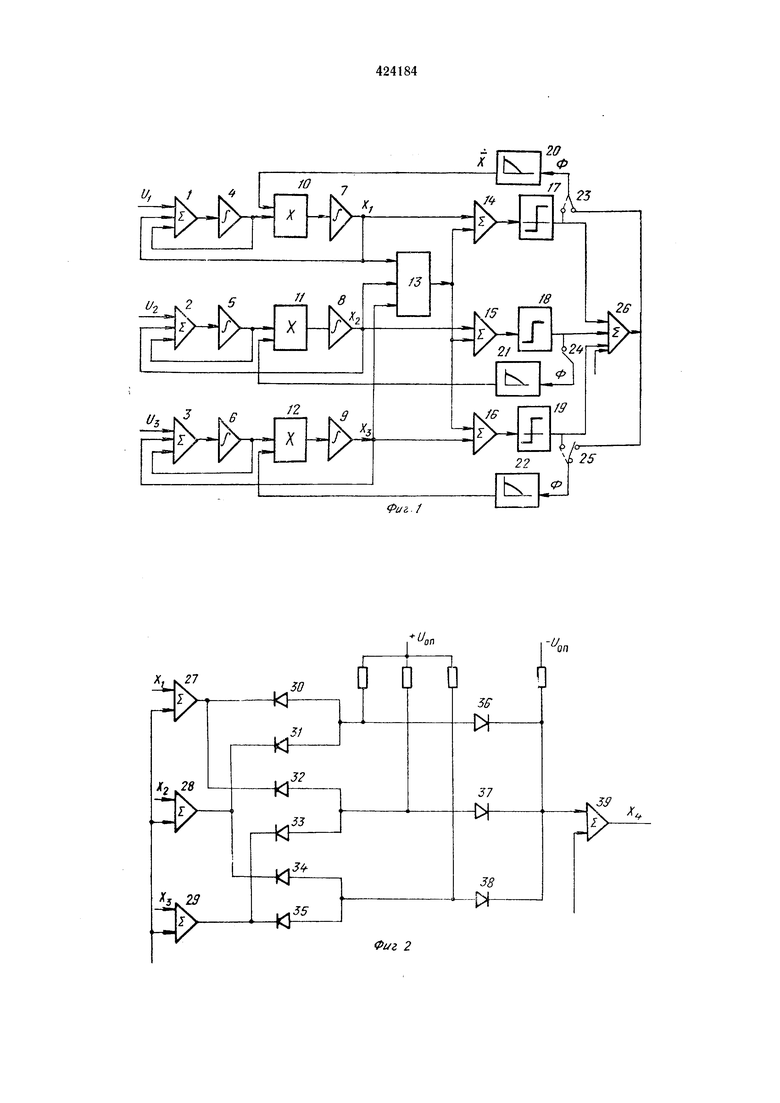
На фиг. 1 представлена схема устройства для моделирования трехканального сервопривода; на фиг. 2 - логическая схема сравнения.
Предлагаемое устройство содержит суммирующие усилители 1-3, интегрирующие усилители 4-9, блоки умножения 10-12, блок
13 выбора среднего значения, суммирующие усилители 14-16, блоки 17-19 с релейной характеристикой, блоки нелинейности 20-22, переключатели 23-25 и выходной суммирующий усилитель 26.
Входные U, U-i, Us соответственно в три канала рулевого агрегата. Передаточная функция каждого из каналов осуществляется при помощи суммирующих усилителей 1-3 и интегрирующих усилителей
4-9. Выходными величииами каналов являются сигналы перемещения поршией Xi, Х и Аз, которые поступают в блок 13. Для каждого момента блок 13 определяет величину среднего сигнала, который и является перемещепие.м выходного элемента сервопривода, так
как в общем случае при наличии рассогласования между каналами положение выходного элемента совпадает со средним по положению каналом.
Разность между сигналами перемещения выходного элемента и перемещений соответствующих каналов (полученная на суммирующих усилителях 14-16) поступает в блоки 17-19, имеющие релейную зависимость усилия Фт, создаваемого гидромуфтой от смещения каналов. Предлагаемое устройство для моделирования позволяет на выходном элементе сервопривода воспроизвести следующие усилия: внешнюю нагрузку и усилие от летчика; усилия от обжатых гидромуфт и усилие от необжатой гидромуфты.
Канал, перемещение которого совпадает с перемещением выходного элемента, имеет необжатую гидромуфту (усилие, воспринимаемое гидромуфтой этого подканала, может меняться от нуля до величины усилия, при котором гидромуфта обжимается). Если гидромуфта канала обжата, то канал нагружается усилием этой гидромуфты, так как внешняя нагрузка на канал передается только через гидромуфту. Если гидромуфта канала обжата, то канал нагружается усилием обжатия этой гидромуфты, так как внешняя нагрузка на канал передается только через гидромуфту. Если гидромуфта канала не обжата, то этот канал нагружается: суммой усилий от двух обжатых гидромуфт (для симметричных гидромуфт эта сумма равпа нулю, если гидромуфты обжаты в разные стороны относительно необжатой гидромуфты); внешней нагрузкой и усилием летчика.
С помощью переключателя, установленного в каждом канале, па блок нелинейности с параболической нагрузочной характеристикой
(Ф) (где X - коэффициент уменьшения скорости движения канала за счет влияния внешней нагрузки Ф) поступает сигнал, эквивалентный нагрузке именно этого канала.
Коэффициент уменьшения скорости X от нагрузки, полученный на выходе блоков нелинейности 20-22, поступает в блоки умножения 10-12, на выходе которых формируется сигнал, пропорциональный скорости с учетом нагрузки.
Выбор среднего значения осуществляют с помощью логической схемы сравнения (см. фиг. 2). Входными сигналами логической схемы сравнения являются перемещения каналов Xi, Xz и Хз. На суммирующие усилители 27-29 подается достоянное отрицательное напряжение -Uc, заведомо большее входных сигналов, на выходе усилителей 27-29 получаются положительные напряжения. Эти напряжения попарно сравниваются в логическом устройстве, состоящем из диодов , и на выход проходит сигнал с большим потенциалом относительно опорного напряжения L/on. Полученные три напряжения опять сравниваются в логическом устройстве, состоящем из диодов 36-38, и на выход проходит сигнал с большим потенциалом относительно опорного напряжения - Uon- Этот сигнал поступает
на суммирующий усилитель 39, складывается с постоянным отрицательным напряжением Uc, и на выходе усилителя 39 получается сигнал Xi, который является средним и эквивалентным перемещению выходного элемента.
Опытный образец предлагае.мого устройства для математического моделирования трехканального сервопривода собран из 50 блоков, исследована его работа и проведено сравнение динамических характеристик, полученных
на модели и на реальном сервоприводе. Результаты, полученные на модели, совпадают с результатами реального сервопривода. Это дает возможность анализировать характеристики систем управления самолетов без использования дорогостоящих реальных агрегатов или сложных моделирующих устройств.
Предмет изобретения
Устройство для моделирования многоканального сервопривода, содержащее в каждом канале последовательно соединенные суммирующий усилитель, первый интегрирующий усилитель, блок умножения и второй интегрирующий усилитель, причем выходы интегрирующих усилителей соединены со входами суммирующего усилителя, другой вход блока умножения подключен к выходу блока нелинейности, вход которого соединен с переключателем, размыкающий контакт переключателя каждого канала соединен с выходом выходного суммирующего усилителя, отличающееся тем, что, с целью повышения точности моделирования и расширения функциональных возможностей устройства, оно содержит блок выбора среднего и последовательно соединенные в каждом канале дополнительный суммирующий усилитель и блок с релейной характеристикой, причем выход второго интегрирующего усилителя каждого канала подключен к соответствующему входу блока выбора среднего и к одному из входов дополнительного суммирующего усилителя, другой вход которого соединен с выходом
блока выбора среднего, а выход каждого блока с релейной характеристикой соединен с замыкающим контактом переключателя данного канала и с одним из входов выходного суммирующего усилителя.
G
fO
и
Р
20 Ф
iST
/7
25
№
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА РОТОРНОГО ЭКСКАВАТОРА | 1973 |
|
SU368375A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 1972 |
|
SU351227A1 |
| Устройство для автоматического управления работой электролизера | 1981 |
|
SU1024528A1 |
| Устройство для моделирования тракта передачи данных | 1980 |
|
SU926665A1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1970 |
|
SU264812A1 |
| АНАЛОГОВЫЙ ИНТЕГРАТОР | 2014 |
|
RU2571618C1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1977 |
|
SU639999A2 |
L в
U
f//2
и
h±
Л
/S
/ I
-Г
2
Ф
ш
V
25
22
Ф
./
.и,
on
on
