раллельно его емкости ключом, второго сум1матора и «елинейного элемента, лри етом выход лервого сумматора через релейный элемент соединен со входом второго суММатора.
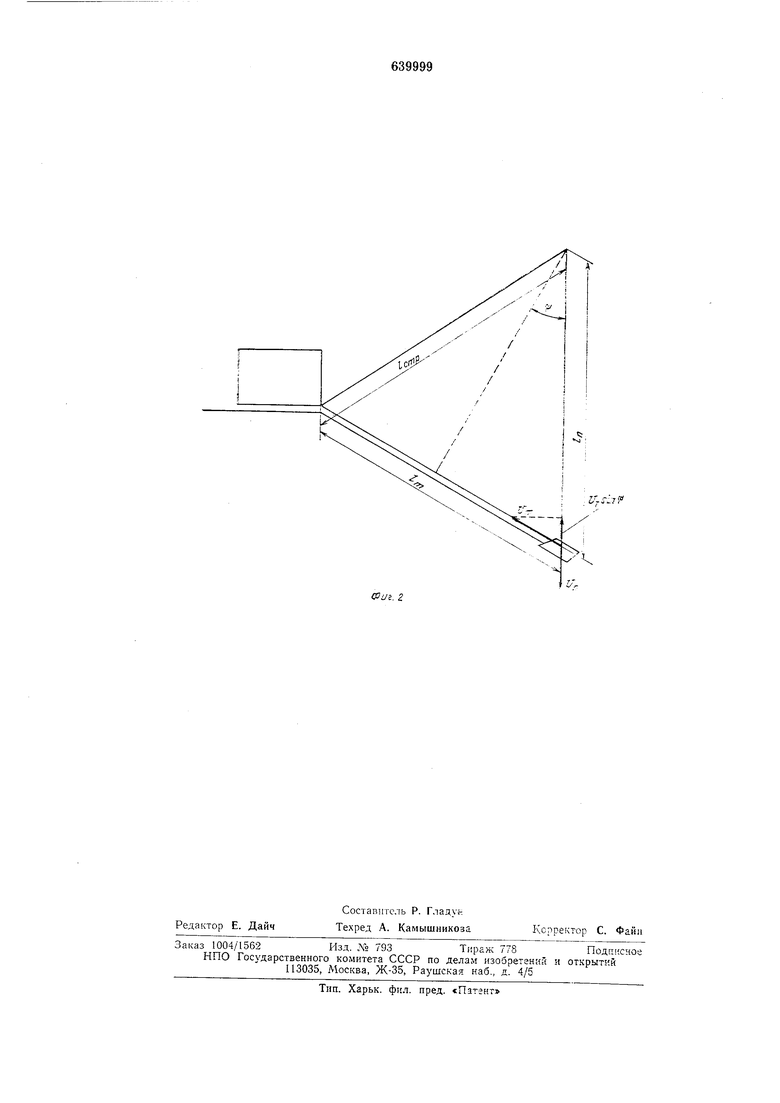
На фиг. 1 изображена схема системы стабилизации натяжения .подъемного «анатз; ка фиг. 2 - схема распределения скоростей лри движении ковша.
Система содержит устройство / у.правлен-ия приводом подъема, лреобразователь 2, двигатель 3, командоалпарат 4, датчик 5 статической составляющей тока, датчвк 6 производной статического тока, задатчик 7 натяжения подъемного каната, первый усилитель 8 и второй усилитель 9.
Ко входам первого усилителя 8 подключены выходы задатчика 7 .натяжения, датчика 5 статической составляющей тока и датчика 6 производной статического тока, а его 1выход и выход командоалпарата 4 подключены ко входу второго усилителя 9, выход которого соединен со входом устройстоза управления .приводом лодъема /.
К выходу датчика 5 статической составляющей тока Якорной щепи подъема подключен релей.ный элемент 10, управляющий ключевым элементом 11, -ко вхо.ду которОПо лрисоединен нелинейный блок 12 .кор|рекции скорости 1по.дъема. Нелинейный блок 12 коррекции скорости лодъема состоит из датчика 13 скорости подъема, приключенного ко 1ВХОДУ первого сумматора 14, интепри1рующего усилителя 15, параллельно которому подсоединен дополнительный ключ 16, дололнительного релейно.го элемента 17, 1входом связанно;го с ВЫХОДОМ первого сумматора 14, а выходом - со вторым су.мматОром 18, через (Нелинейный элемент 19 соединенного с ключевым элементом //.
Ко входам лервого 14 н второго 18 сум.матор-ов, кроме того, подключен .выход бло:г;а 20 вычисления ооста.зляющей скоросттяги.
Блок 20 вычислення составляющей скорости тяги 1включает в себя сумматор . (первый 22 и второй 23 квадраторы, первый 24, второй 25 и третий 26 блоки умножения, функциональный преобразователь 27 и источник 28 лостоянного напряжения. Ко входам сумматора 2,1 лриключены через первый -квадратор 22 датчик 29 длины подъема ого каната и через .второй квадратор 23 - датчик 30 длины тягового .ка.ната. Выход су.мматора 21 соединен со входом второго блока умножения 25, Бто1рым входом через функциональный преобразователь 27 связанного с третьим блоком умножения 26. Входы третьего блока ум1ножения 26 при.ключекы к датчикам 29 и 30.
Входы лервого блока умножения 24 связаны с датчиком 31 скорости тяги и выходо,м второго бло.ка умножения 25, а его выход П-одключен ко входам лервого суммато(ра 14 и зтораго сумматора 18.
Устройство работает следующим образом.
После касания ковшом лрунта (при опускании ковша на забой) начинает образовьшаться слабина подъемного каната и усилие 13 подъемно.м канате резко уменьшается до Минимального знач-ения 5„. В результате этого лоявляются сигналы ,на выходах второго усилителя 9 и релейного элемента 10. Ск-гнал с релейного .э.темента W замыкает ключевой элемент // и размыкает дополнительный ключ 16.
Величина слабины лодъемного каната определяется как интеграл ло времени от скорости УСЛ образования этой слабины.
Скорость образования слабины подъемного каната УСЛ определяется как сумма скорости Привода подъема и составляющей скорости тяги, т. е. ее проекции на лодъемный канат,
УСИ п ± V-rSin .
Составляющая скорости тяги опре.деляется с помощью датчика 29 длины лодъемпаго каната, датчика 30 длины тягового каната, датчика 31 скорости тяги и блока 20 вычисления составляющей скорости тяги.
Синус угла ф определяется как
I- - ;2
где /п, /т.стр-соответственно длины стрелы, подъемного и тягового каната.
Ст :гнал с датчика 29 в первом квадраторе 22 возводится в квадрат, а .во втором квадраторе 23 возводится в кзадрат сигнал с датчика 30.
С выхода источника 28 лостоянно.го напряжения снимается сигнал, лропорциональный квадрату длины стрелы /ётр.
Сишнал с квадраторов 22 и 23 и с источника 28 ностоянного напряжения суммируются в сум1маторе 21, напряжение на выходе которого про.порционально -
стрС выхода третьего блока умножения 26, соединенного с датчиками длин подъемного 51 тятового каната 29 и 30, снимается сигнал, пропорциональный удвоенному произведению этих длин, т. е. равный 2/п/г, а с выхо.да функционального преобразователя 27 - сигнал равный. Этот сигнал перемножается во втором блоке .умноже.ния 25 с сигналом на выходе сумматора 21, в результате чего с выхода STOiporo блока умножения снимается оиг.нал, пропорциональный
1
/2
/- - Г21,1,
тстр.
Этот сигнал в первом блоке умножения
24 леремножается с сигналом на выходе
65 датчика скорости тяги 31, в результате чего результирующий сигнал .пропорционален l/T-sin 6.
Нелинейный блок коррекции скорости подъема 12 предназначен для такого управления скоростью подъема, ири котором В момент окончания выбора слаблны подъемного каната скорость была бы близка к нулю.
На первый сум-матор 14 поступают сигналы Вычисления составляющей скорости тяги 20, в результате чего на выходе сумматора 14 сигнал шрОБОрционален скорости Oi6pa3OBaHHH слабины.
.T УЧ+ V, Sin6.
Этот сипнал поступает на интегрирующий усилитель 15, на выходе которого в момент касаиИЯ коашом грунта, КОгда усилие в подъемном канате резко уменьшается и размыкается дололнительны-й ключ 16, появляется .напряжение, .пропорциональное .величине слабины подъемного ка.ната .налрЯжение с выхода интегрирующего усилителя -15 поступает на вход второго сумматора 18, второй вход которого связан с дополнительным релейным элементом 17. Напряжение на выходе второго сумматора 18 равно нулю до тех .пор, пока скорость образования слабины подъемного каната V.i положительна и на вььходе до.полн.ительного релейного элемента 17 имеется отрицательный сигнал. При реверсировании привода полъема, когда слабина подъемного каната достигает .максимального значения, а скорость образования слабины ста.новится равной нулю, дополнительный релейный элемент 17 перебрасывается и напряжение на .его выходе становится равным нулю.
При этом .на выходе второго сумматора 18 появляется сигнал, пропорциональный величине сла-бины подъемного каната, скорректированный на .величину, пропордиональную составляющей скорости тяги V.f sin if. Этот сигнал .поступает на .нелинейнЫй элемент /Р, выходное напряжение которого изменяется в зависимости от скорректированной величины слабины подъемного каната таким образом, чтобы к моменту око.нчания выбора слабины скорость подъема была близка к нулю. Зависимость вход - ВЫХОД нелинейного элемента 19 рассчитывается обычным .путем, исходя из тахограммы привода подъема. Сигнал с нелинейного элемента 19 через ключевой элемент 11 поступает на вход второго усилителя 9, причем он действует встречно с напряжением на выходе иервого усилителя.
В момент окончания выбора слабины усилие в подъемном канате /возрастает, ;в результате чего перебрасывается релейный
элемент 10, размыкающий ключевой элемент // и замыкающий дополнительный ключ 16. При этом работает только система стабилизации натяжения подъемного ка.ната, стабилизирующая в процессе черпания заданное натяжение .подъемного .каната.
Использование настоящего технического решения облегчает раб-эту маши.ниста, значительно сокращает длительность выбора слабины, подъемного каната при его спуске с высокой скоростью и повышает производительность .и надежность экскаватора.
Формула изобретения
15
1.Система стабилизации натяжения подъемного каната экскаватора-драглайна по авт. ав. X9 599023. отличающаяся
тем, что, с целью повыщения производительности экскаватора путем оптимизации процесса выбора слабины подъемного каната, система дополнительно снабжена блоком вычисления составляющей скорости тяги, подключенными к его входам датчиками длин подъемного .и тягового канатов и датчиком скорости тяги не,1инейным блоком коррекции скорости подъема и последовательно соединенными релейным и ключевы.м
элементами, пр.ичем вы.чод блока вычисления составляющей скорости тяги подключен к одному ИЗ входов нелинейного блока коррекции скорости подъема, ко второму входу которого .подключен соединенный с датчиком статической составляющей тока якорной цепи привода подъема релейный элемент, а его выход через ключевой элемент подключе.нКО входу второго усилителя.
2.Система по п. 1, о т л и ч а ю щ а я с я тем, что блок вычисления составляющей
скорости тяги выполнен в виде двух ква.т,раторов, источника постоянного напряжения, трех блоков умножения, сумматора i; функционального преобразователя, причем первый :блок умножения через функциональный преобразователь подключен к одному ИЗ входов второго блока умножения, ко второму входу которого подключены через сумматор источник постоянного напряжения и квадраторы, а его вы.ход соединен со входом третьего блока умножения.
3. CiiCTCMa по п. 1, о т л и ч а ю щ а я с я тем, что нелинейный блок коррекции скорости подъема выполнен в виде релейного элемента и последовательно соединенных датчика скорости подъема. первого сумматора, илтегрального усилителя с включенным параллельно его емкости ключом, второго сумматора и нелинейного элемента, при этом выход первого сумматора через релейный соединен со входом второго сумматора.
28
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147001C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |