1
Изобретение относится к. средствам автоматизации производственных процессов на открытых горных разработках, а именно к. устройству автоматического управления приводом поворота роторного экскаватора.
Известно устройство автоматического управления приводом поворота роторного экскаватора, включающее задатчик нагрузки привода ротора, блок сравнения, блоки деления и умножения, датчики нагрузки привода ротора и скорости боковой подачи, усилитель и объект управления.
Целью изобретения является повышение быстродействия и точности устройства.
С э1он целью датчикн нагрузки, привода ротора и скорости боковой подачи соединены с соответствующими входами блока деления, выход которого, в свою очередь, соединен с одним входом блока умножения, к другому входу которого подключен задатчик нагрузки привода ротора, а выход -через усилитель связан с объектом управления.
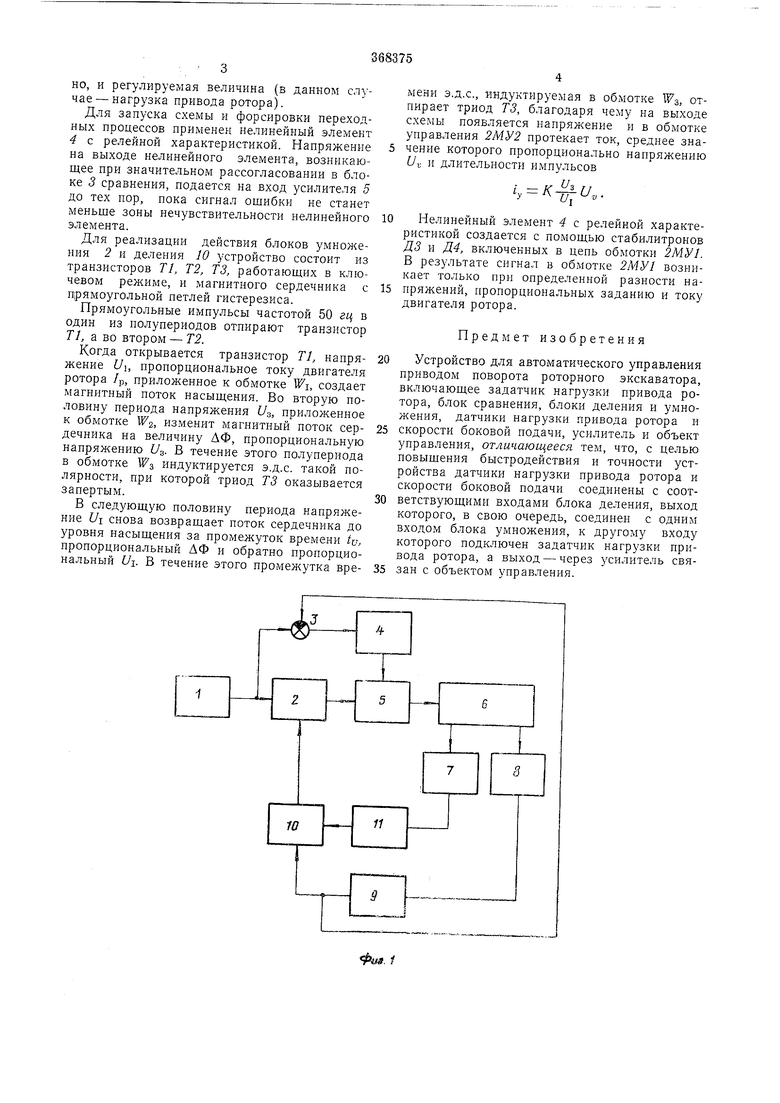
На фиг. 1 изображена функциональная схема устройства; па фиг. 2 - принципиальная схема устройства.
Устройство состоит из задатчика 1 нагрузки привода ротора, например, сельсинного командоаппарата, который соединен с одним из входов блока 2 умножения и блока 3 сравнения. Выход блока сравнения 3 через нелинейный элемент 4 соединен с одним из входов усилителя 5 второй вход которого связан с выходом блока 2 умножения, а выход с объектом 6 управления, состоящим из электромеханических устройств приводов ротора и поворота экскаватора, взаимодействующих через забой.
Выходы объекта 6 соединены с датчиками 7, 8 соответственно скорости боковой подачи
и нагрузки привода ротора. Выход датчика 8 нагрузки через фильтр 9 соединен со вторым входом суммирующего блока 3 и с одним из входов блока iO деления. Второй вход блока деления через фильтр 11 связан с датчиком 7
скорости боковой подачи, а выход - со вторым входом блока 2 умножения.
Устройство автоматического управления электроприводом поворота роторного экскаватора работает следующим образо.м.
В блоке 10 деления вычисляется величина обратно пропорциональная передаточному коэффициенту объекта путем деления сигнала скорости боковой подачи на сигнал нагрузки привода ротора. Б блоке 2 выходной сигнал
задатчика / умножается на величину, обратно пропорциональную передаточному коэффициенту объекта. Таким образом, во всех случаях независимо от передаточного коэффициента объекта стабилизируется общий передаточный коэффициент устройства, а. следовательно, и регулируемая величина (в данном случае-нагрузка привода ротора).
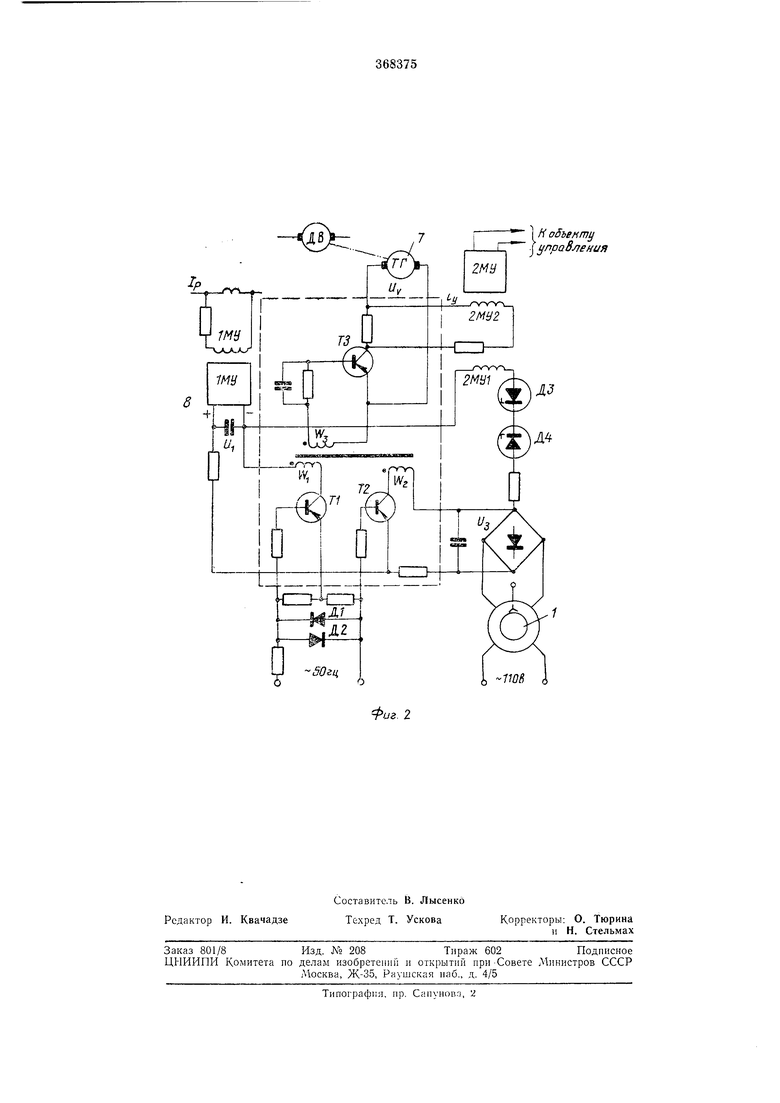
Для запуска схемы и форсировки переходных процессов применен нелинейный элемент 4 с релейной характеристикой. Напряжение на выходе нелинейного элемента, возникающее при значительном рассогласовании в блоке 3 сравнения, подается на вход усилителя 5 до тех пор, пока сигнал ошибки не станет меньше зоны нечувствительности нелинейного элемента.
Для реализации действия блоков умножения 2 и деления 10 устройство состоит из транзисторов Т1, Т2, ТЗ, работаюш;их в ключевом режиме, и магнитного сердечника с прямоугольной петлей гистерезиса.
Прямоугольные импульсы частотой 50 гц в один из полупериодов отпирают транзистор Т1, а во втором - Т2.
Когда открывается транзистор Т1, напряжение Ui, пропорциональное току двигателя ротора /р, приложенное к обмотке Wi, создает магнитный поток насыщения. Во вторую половину периода напряжения Us, приложенное к обмотке , изменит магнитный поток сердечника на величину АФ, пропорциональную напряжению Us- В течение этого полупериода в обмотке индуктируется э.д.с. такой полярности, при которой триод ТЗ оказывается запертым.
В следующую половину периода напряжение Ui снова возвращает поток сердечника до уровня насыщения за промежуток времени tu, пропорциональный АФ и обратно пропорциональный Ui. В течение этого промежутка времени Э.Д.С., индуктируемая в обмотке W, отпирает триод ТЗ, благодаря чему на выходе схемы появляется напряжение и в обмотке управления 2МУ2 протекает ток, среднее значение которого пропорционально напряжению и и длительности импульсов
и„
iy к
и.
Нелинейный элемент 4 с релейной характеристикой создается с помощью стабилитронов ДЗ и Д4, включенных в цепь обмотки 2МУ1. В результате сигнал в обмотке 2МУ1 возникает только при определенной разности напряжений, пропорциональных заданию и току двигателя ротора.
Предмет изобретения
Устройство для автоматического управления приводом поворота роторного экскаватора, включающее задатчик нагрузки привода ротора, блок сравнения, блоки деления и умножения, датчики нагрузки привода ротора и
скорости боковой подачи, усилитель и объект управления, отличающееся тем, что, с целью повышения быстродействия и точности устройства датчики нагрузки привода ротора и скорости боковой подачи соединены с соответствующими входами блока деления, выход которого, в свою очередь, соединен с одним входом блока умножения, к другому входу которого подключен задатчик нагрузки привода ротора, а выход - через усилитель связан с объектом управления.
Р
Н объенту упраВ ения
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЬ[М ЭКСКАВАТОРОМ | 1971 |
|
SU304333A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| Многодвигательный электропривод | 1988 |
|
SU1649632A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |