1
Изобретение относится к станкостроению.
Известны устройства для снятия заусенцев на изделиях типа круглых пластин, содержащие привод главного движения, привод рабочей подачи, резцедержатель с режущим инструментом ц механизм зажима с вращающимися ведущим и ведомым захватами. Диаметр вращающихся захватов выполнен меньщим диаметра изделия па величину обрабатываемого участка. Осевой опорой ведомого захвата служит подщипник скольжения.
Захваты, между которыми установлена заготовка, приводятся во вращение и подаются к инструменту, движущемуся возвратнопоступательно. Механизм подачи при этом перемещает значительную массу привода главного движения в направлении рабочей подачи. Наблюдаются зпачительные инерционные нагрузки и проскальзывающие изделия.
Предлагаемое устройство отличается от известных тем, что привод рабочей подачи разобщен с приводом главного движения и кинематически связан через клиновой механизм с резцедержателем, ведущий захват снабжен подвижным, охватывающим изделие базовым упором, периодически взаимодействующим через клинорычажное устройство с механизмом зажима, а ведомый захват - упорным шарикоподщипником.
Такое выполнение увеличивает производительность устройства.
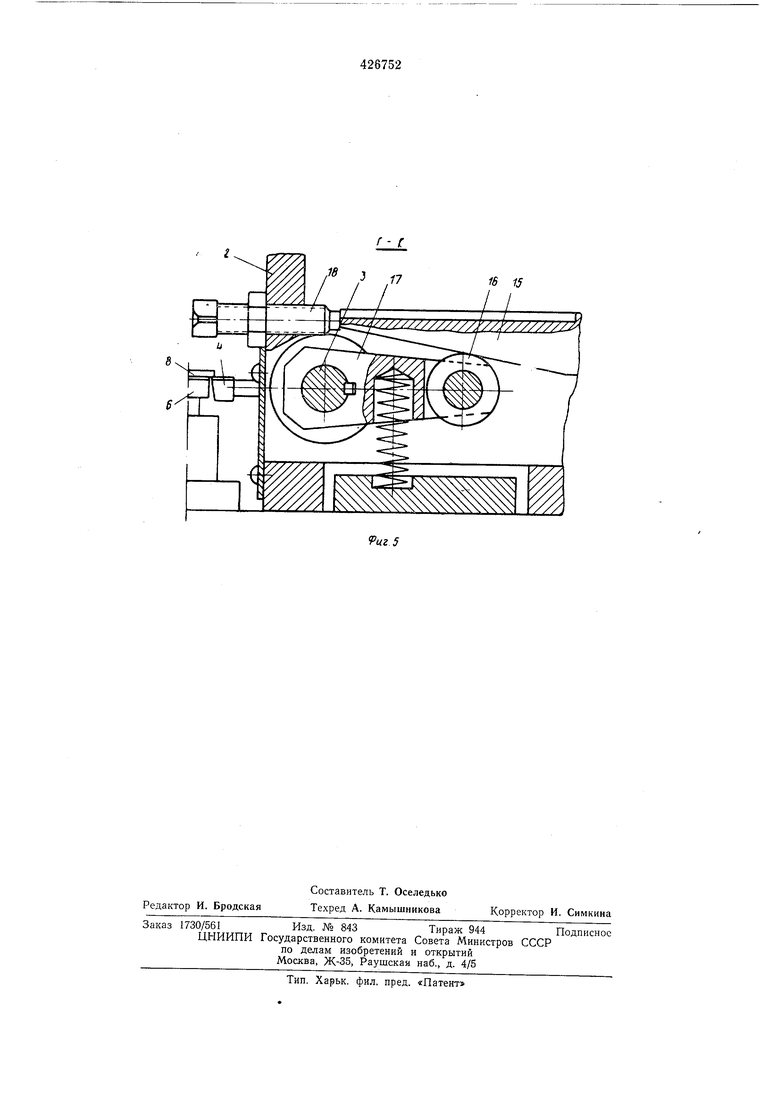
На фиг. 1 схематично изображено предлагаемое устройство, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; па фиг. 3 - разрез по Б-Б па фиг. 1; на фиг. 4 - разрез по В-В на фиг. 2; на фиг. 5 - разрез по Г-Г на фиг. 2.
Устройство состоит из привода / рабочей подачи, привода 2 главного движения, резцедержателя 3 с режущим инструментом 4 и механизма 5 зажима с вращающимися ведущим 6 и ведомььм 7 захватами, диаметр которых меньше диаметра изделия 8 на величину обрабатываемого участка. Вращающийся ведомый захват 7 щарнирно связан со щпинделем 9, смонтированным в механизме 5 зажима посредством радиальных шарикоподшипников 10 и упорного шарикоподщиппика 11. Вращающийся ведущий захват 6 через вал-щестерню 12 соединен с приводом 2 главного движения. Вал-шестерня 12 установлен в радиальных щарикоподщиганиках 13 и упорном шарикоподщиппике 14. Привод 1 рабочей подачи разобщеп с приводом 2 главного дзиже-шя и кинематически связан через подвижный клин 15 с резцедержателем 3 посредством ролика 6 п подпружиненного рычага /7. Рабочий ход механизма подачи и режущего инструмента 4 регулируется жестким упором 18. Ведущий захват 6 снабжен подвижным, охватывающим изделие базовым упором 19, поджатым пружиной 20 и периодически взавмодействующим с механизмом 5 зажима через поворотный рычаг 21, подпружиненный клин 22, толкатель 23 с роликом 24, винтовым упором 25 и резьбовой пробки 26. В исходном положении механизм 5 зажима отведен вверх пневмоприводом (не показано), при этом подпружиненный клин 22 находится (фиг. 4) в верхнем положении, а подвижный базовый упор 19 посредством пружи-ны 20 введеп в рабочую зону. Подвижный клин J5 (фиг. 5) отведен от жесткого упора 18 пневмоприводом (не показано), а реж)щий инструмент отведен вниз подпружиненным рычагом 17.
Устройство работает следующим образом.
Изделие 8 устанавливается на захват 6 и перемещается до соприкосновения с охватывающим изделие базовым упором 19, обеспечивающим точную установку изделия, после чего механизм 5 зажима с ведомым захватом 7 опускается вниз и зажимает изделие 8. При этом механизм зажима нажимает на поворотный рычаг 21, он перемещает вниз подпружиненный клип 22, который через ролик 24, толкатель 23, винтовой упор 25 и резьбовую пробку 26 выводит подвижный базовый упор 19 из рабочей зоны. Далее включается вращение изделия 8 вместе с ведущим 6 и ведомым 7 захватами посредством привода 2 -главного движения через вал-щестерню 12 и включается перемещение подвижного клина 15 в направлении к жесткому упору 13.
Клин 15 через ролик 16, подпружиненный рычаг 17 и резцедержатель 3 перемещает режущий инструмент 4 со скоростью рабочей подачи в направлении к изделию 8 вдоль оси его вращения, и режущий и1НСТрумбнт 4 снимает заусенцы с изделия 8. В конце хода подвижный клин 15 упирается Б жесткий упор 18,
и подается команда на отвод механизма 5 зажима и подвижного клина 15 в исходное положение, режущий инструмеит 4 отводится от изделия 8 вниз подпружинеппым рычагом /7 через резцедержатель 3, а базовый упор 19
подводится в рабочую зону.
Предмет изобретения
Устройство для снятия заусенцев па изделиях типа круглых пластин, содержащее привод главного движения, привод рабочей подаi4H, резцедержатель с режущим инструментом и меха-низм зажима изделия с вращающимися ведущим и ведомым захватами, отличающееся тем, что, с целью увеличения производительности устройства, привод рабочей подачи разобщен с приводом главного движения и кинематически связан через клиновой механизм с резцедержателем, ведущий захват снабжен подвижным, охватывающим изделие базовым упором, периодически взаимодействующим через клинорычажное устройство с механизмом зажИМа, а ведомый захват - запорным щарикоподщипником.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снятия заусенцев | 1982 |
|
SU1127692A1 |
| Агрегатный станок | 1982 |
|
SU1042957A1 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ЗАУСЕНЦЕВ | 1992 |
|
RU2008128C1 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
| Штамп для резки пруткового материала | 1981 |
|
SU988471A1 |
| Резьботокарный полуавтомат | 1986 |
|
SU1366330A1 |
| Полуавтомат для заклинивания обмоток в пазах якоря | 1972 |
|
SU510766A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ | 1992 |
|
RU2036771C1 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ФИКСАЦИИ ЗАМЫКАЮЩЕГО РЫЧАГА | 2007 |
|
RU2449751C2 |

«2.4 .J rfJ S Sici i -s , I I ( ЙГ;--Й5У
/ (
