Изобретение относится к машиностроению.
Известны переключатели для управления, например, манипуляторами, установленный в корпусе подвижный рычаг которых снабжен рабочим звеном, взаимодействующим с микропереключателями через промежуточные элементы.
Предлагаемый переключатель отличается от известных тем, что промежуточные элементы выполнены в виде рычагов, несущих по два ролика, нижние из которых подпружинены к корпусу охватывающей их замкнутой пружиной, а верхние расположены во впадинах рабочего звена, представляющего собой, например, четырехконечную звездочку с оптимальным углом между смежными гранями 135°.
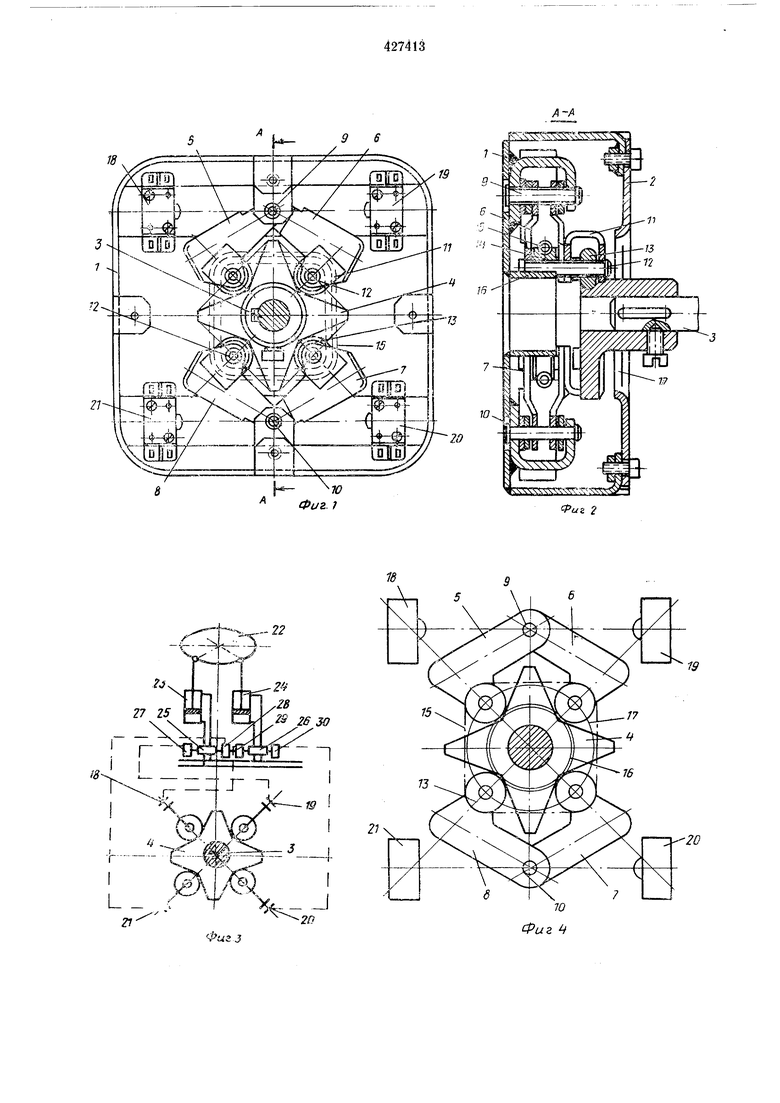
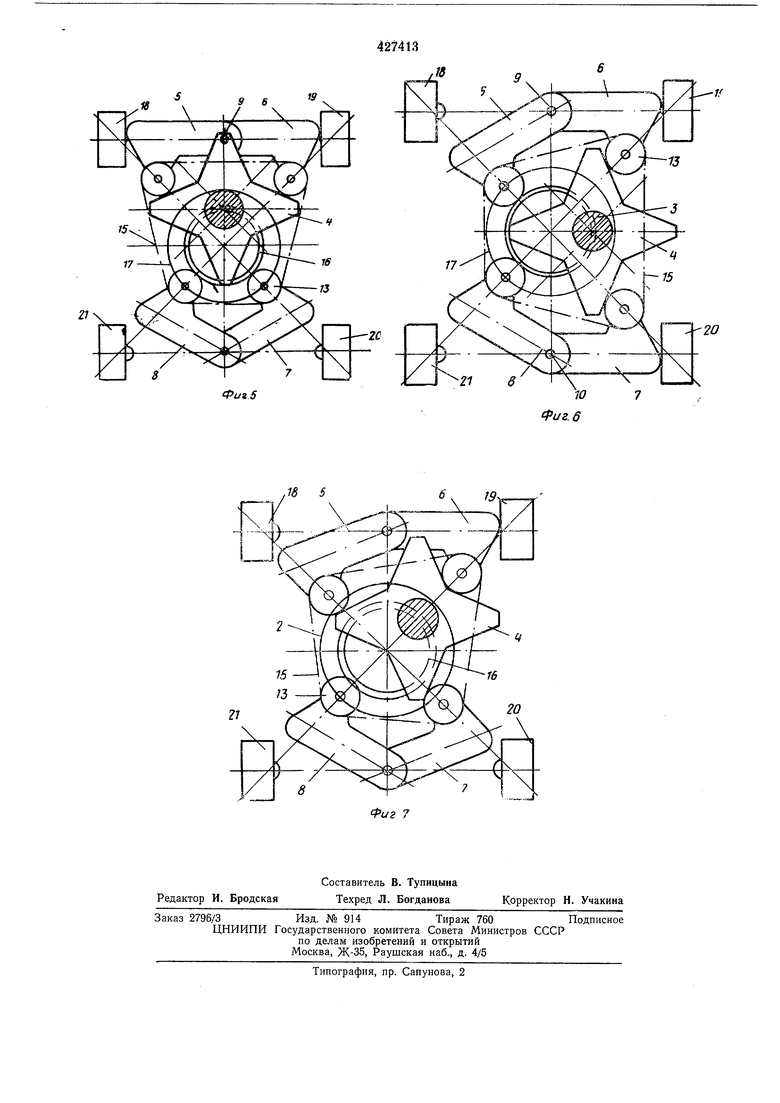
Па фиг. 1 показан предлагаемый переключатель, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - схема работы переключателя в системе управления манипулятором; на фиг. 4 - схема переключателя в исходном положении; на фиг. 5 - то же, в положении «Включено вверх ; на фиг. 6 - то же, в положении «Включено вправо ; на фиг. 7 - то же, в положении «Включено вверх - вправо.
Переключатель состоит из корпуса 1 с крышкой 2, в котором размещен подвижный рычаг 3 с жестко закрепленным на нем рабочим звеном в виде звездочки 4, расположенной между рычагами 5-8, смонтированными попарно на осях 9 и 10 в корпусе 1. На рычагах 5-8 жестко установлены кронштейны
11, в каждом из которых на оси 12 закреплены ролики 13, взаимодействующие со звездочкой 4. На осях 12 также закреплены ролики 14, с помощью которых и замкнутой пружины 15 рычаги 5-8 подпружинены к
жестко установленному цилиндру 16, являющемуся частью корпуса 1. Направляющими для роликов 13 служат грани звездочки 4. Для обеспечения постоянного усилия, необходимого для перемещения рычага 3 и одинаковой величины его перемещения, звездочка выполнена четырехконечной с оптимальным углом 135° между смежными гранями. Крышка 2 имеет в центре круглое отверстие 17, обеспечивающее кольцевой зазор между
звездочкой 4 и крышкой 2, равный величине хода рычага 3.
Справа и слева от осей 9 и 10 на расстоянии, равном длине рычагов 5-8, в корпусе 1 установлены микропереключатели 18-21.
Переключатель работает следующим образом.
Для управления манипулятором, например одним из его сферических шарниров 22, в кинематическую схему управления включают
два гидроцилиндра 23 и 24, соединенные с
напорной магистралью через золотники 25 и 26 с электромагнитами 27-30, каждый из которых подключен к микропереключателям 18-21 устройства.
В исходном положении замкнутая пружина 15 поджимает ролики 14 к цилиндру 16 корпуса 1, а ролики 13 удерживают рычаг 3 со звездочкой 4 в исходном положении. Усилие пружины 15 выбирается в зависимости от допустимой нагрузки на подвижный рычаг 3. В этом положении поводки 5-8 удалены от всех микропереключателей 18-21 (фиг. 4). Электромагниты 27-30 золотников 25 и 26 обесточены, гидроцилиндры 23 и 24 закрыты (фиг. 3).
При подаче команды, например «подъем рычаг 3 со звездочкой 4 перемещают вверх по вертикали до упора в крышку 2 (фиг. 5). При этом ролики 14 на рычагах 7 и 8 прижаты к цилиндру 16, а ролики 13, расположенные на этих же рычагах, остаются в исходном положении. Рычаги 5 и 6 с роликами 13 и 14 повернутся относительно оси 9 и замкнут микропереключатели 18 и 19.
Поданное напряжение на электромагниты 27 и 29 золотников 25 и 26 вызовет соединение напорной магистрали с нижними полостями гидроцилиндров 23, 24, а сливной магистрали- с их верхними полостями, при этом шарнир 22 повернется вверх (фиг. 3).
Для подачи команды «опускание аналогичным образом перемещают рычаг 3 со звездочкой 4 вниз по вертикали.
При подаче команды «поворот вправо (фиг. 6) рычаг 3 со звездочкой 4 перемещают вправо по горизонтали до упора в крышку 2, ролики 14 на рычагах 5 и 8 остаются прижатыми к цилиндру 16, а рычаги 6 и 7 соответственно повернутся относительно осей 9 и 10 и замкнут конечные выключатели 19 и 20. Поданное напряжение на электромагниты 27 и 30 золотников 25 и 26 вызовет соединение напорной магистрали с нижней иолостью гидроцилиндра 23 и с верхней полостью гидроцилиндра 24, а сливной магистрали - с верхней полостью гидроцилиндра 23 и нижней полостью гидроцилиндра 24, при этом шарнир 22 повернется вправо.
Таким образом, переключатель обеспечивает четыре основных команды («вверх - подъем, «вниз - опускание, «поворот влево и «поворот вправо) и четыре дополнительных команды («вверх - вправо, «вверх - влево, «вниз - вправо, «вниз - влево). Эти дополнительные команды осуществляют перемещение шарнира 22 по осям, повернутым относительно вертикальной и горизонтальной осей на угол 45°.
При подаче дополнительной команды, например, «вверх - вправо рычаг 3 со звездочкой 4 перемещают в заданном направлении до упора в крышку 2 (фиг. 7). При этом ролики 14 на рычаге 8 прижаты к цилиндру 16 корпуса I, а ролик 13 остается в исходном положении.
Ролики 13 на рычагах 5 и 7 за счет граней звездочки, расположенных под углом 135°, соответственно переместятся на половину хода звездочки 4. Таким образом, деформация пружины 15,
следовательно, и усилие на рычаге остается постоянным как для основных, так и для дополнительных команд. В результате симметричного расположения направляющих на звездочке 4 и одинакового усилия обеспечивается надежность напряжения подачи команд.
Поданное напряжение на электромагнит 27 золотника 25 вызовет соединение напорной магистрали с нижней полостью цилиндра 23,
а сливной магистрали с его верхней полостью, цилиндр 24 остается закрытым, а шарнир 22 повернется вправо.
При подаче команды, например, «вниз - влево замыкается конечный выключатель
21 и напорная магистраль соединяется с верхней полостью цилиндра 23, а сливная - с его нижней полостью.
Переключатель предусматривает быстрый переход на смежные команды, минуя нулевое
положение рабочего звена, для чего рычаг перемещают в радиальном направлении в пределах круглого отверстия в крышке 2, при этом происходит изменение комбинаций замыкаемых микропереключателей. Возврат
рабочего звена в нулевое положение, следовательно, и прерывание команды осуществляется автоматически одновременно со снятием действующего на рычаг усилия, которое задается с учетом наименьшей утомляемости
оператора, обеспечивая надежность управления за счет подбора пружины 15 по жестк1эсти и длине.
Предмет изобретения
Переключатель для управления, например, манипулятором, установленный в корпусе подвижный рычаг которого снабжен рабочим
звеном, взаимодействующим с микропереключателями через промежуточные элементы, отличающийся тем, что, с целью повышения маневренности и надежности, промежуточные элементы выполнены в виде рычагов, несущих по два ролика, нижние из которых подпружинены к корпусу охватывающей их замкнутой пружиной, а верхние расположены во впадинах рабочего звена, представляющего собой, например, четырехконечную звездочку с оптимальным углом между смежными гранями 135°С.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1972 |
|
SU349598A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЦИКЛОМ СТУПЕНЧАТОЙ ПОДАЧИ НА СТАНКАХ ГЛУБОКОГОСВЕРЛЕНИЯ | 1971 |
|
SU429927A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ЗАГРУЗКИ УБОРОЧНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 1969 |
|
SU248364A1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР ДЛЯ МОНТАЖА И СБОРКИ ИЗДЕЛИЙ | 1973 |
|
SU382559A1 |
| МЕХАНИЗМ ШАРНИРА МАНИПУЛЯТОРА | 1973 |
|
SU393083A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU929463A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
Фигз
