1
Изобретение относится к устройствам сочленения и привода звеньев манипуляторов, Предназначеиных, наиример, для строительномонтажных, технологических, погрузо-разгрузочных, Подъелшо-транспортных и други операций.
Известен механизм шарнира 1мани1пулятора, КОриус которого шарнирно соединен с исполнительным звеном и приводными звеньями переменной длины.
Предлагаемый механизм отличается от известных тем, что с целью повышения мавевренности корпус его снабжен жестко закрепленным на нем стержнем, свободный конец которо-го несет крестовину, шар-иирно соединяющую исполнительное звено с корпусом.
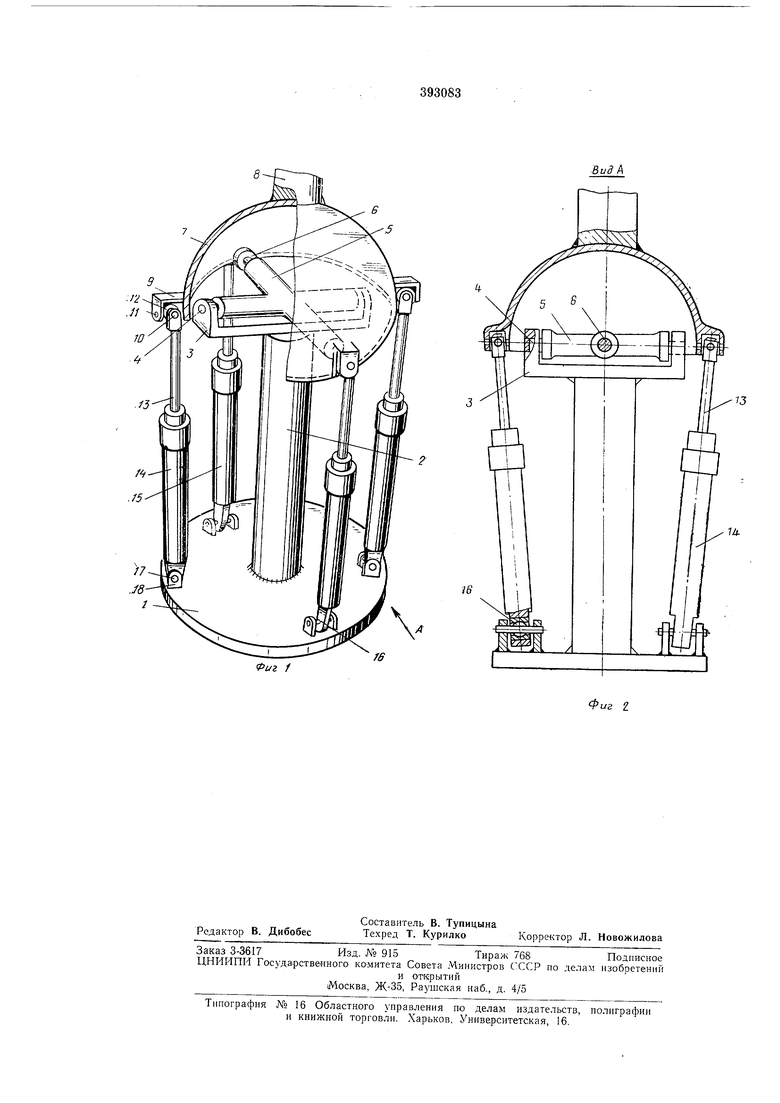
На фиг. 1 локазан описываемые механиз.м, общий вид; на фиг. 2 - вид А.
На корпусе 1 механизма жестко закреплен стержень 2, а на верхнем конце стержня - кронщтейн 3, несущий ось 4, размещенную перпендикулярно оси стержня. На -оси 4 щарнирно установлена крестовина 5 с осью 6, расположенный перпендикулярно оси 4. Крестовина щарнирно соединена с исполнительным звеном 7, выполненным в вид полусферы, охватывающей крестовину. В верхней части полусферы жестко закреплен стержень 8, а на Периферии - кронщтейн 9, в которых
С помощью осей 10 и 11 и крестовины 12 смонтированы штоки 13 гидрошилиндров 14 и 15. Нижний конец гидроцилиндра посредством щарнирното подщипника 16 я оси 77 установлен в кронщтейне 18, жестко закрепленном на корпусе 1. Механизм может быть выполнен с одной или двумя парами гидро-цилиндров 14 и 15.
При наличии в механизме одной лары гидроцилиндров 14 или 15 оба шарнира, соединяющие исполнительное звено 7 со штоками 13 гидродилиндров 14 или 15, не лежат на одной прямой, проходящей через центр крестовины 5; наиболее выгодное расположение одной пары гидрОЦилиндров при центральном угле, равно.м 90°. Шарниры штоков 13 быть размещены против оси 4 6 крестовины 5. Цилиндры раздельно подключены к магистрали питания через систему, которая обеспечивает их раздельное управление.
При наличии в механизме двух пар гидроцилиндров их шарниры размещены симметрично, а центры шарниров расположены на одной прямой, проходящей через дентр крестовины. В этом случае цилиндры подключены к магистралям питания и управления попарно. Каждая пара цилиндров соединена между собой .разноименными полостями. Все пары подключены к магистрали питания через систему управления, обеспечивающую
раздельное управление этими парами цилиндров.
В механизме используются две пары гидроцилиндров 14 и 15, равно |раоположеН1Ные вокруг стержня 2 корпуса /.
В исходном положении все гидроцилиндры 14 и 15 закрыты системой у1Нравления; штоки 13 образуют с .цилиндрами единые звенья и фиксируют положение исполнительного звена 7 относительно кориуса 1.
При повороте иаполнительного звена 7 в плоскости чертежа (фиг. 2) влево от центральной оси стержня 2, жидкость подается одновременяо в левый и правый гидроцилиндры 14, расположенные в ллоокости чертежа, но в левом циливдре жидкость поступает в верхнюю, а в правом - (В нижнюю полость. Цилиндры 15, расположенные в плоскости, перпендикулярной плоскости чертежа, остаются закрытыми . Левый цилиндр 14 сокращается, а правый удлиняется, исполнительное звено 7 поворачивается влево вокруг оси 6, (Проходящей через центры шарниров цилиндров 15, не изменяющих длину; при этом крутящий .момент, передаваемый от цилиндров 14 исполнительному звену 7, суммируется. Крестовина 5 не вращается, исполнительное звено 7 поворачивается на осях 6. Поворот наполнительного звена 7 прекращается по прекращении подачи жидкости в цилиндры; щя этом система управления закрывает цилиндры, фиксируя тем самым положение исполнительного звена 7 относительно корпуса /. При повороте исполнительного звена 7 вправо работа механизма аналогична, только меняется порядок подачи жидкости в цилиндры; в этом случае жидкость поступает одновременно в верхнюю полость лравото и в нижнюю полость леваго цилиндров 14.
При повороте исполнительного звена 7 в плоскости, перпендикулярной плоскости чертежа (фиг. 2), цилиндры 14, расположенные в плоскости чертежа, все время остаются закрытыми и длину не меняют, а цилиндры 15, расположенные в плоокости, перпендикулярной плоскости чертежа, изменяют длину соответственно направлению поворота. В этом случае исполнительное звено 7 поворачивается вокруг оси 4, проходящей через шарниры левого и правого цилиндров 14, вместе с крестовиной 5 на осях 4. При повороте исполнительного звена в плоскости чертежа и в плоскости, ей перпендикулярной, цилиндры, не изменяющие своей длины, от исходного положения не отклоняются, а цилиндры, изменяющие длину, отклоняются на шарнирных лодшипниках 16 к центру стержня 2, но угол их поворота при этом значительно меньше угла поворота исполнительного звена, а отклонение происходит в разные стороны.
При необходимости поворота иополнительного звена 7 в плоскости, размещенной к плоскости чертежа под углом, не равным 90°, жадность одновременно подают в обе пары цилиндров 14 и 15. Величина угла наклона плоскости поворота определяется соотнощениехм количества подаваемой в цилиндры этих пар жидкости: при одинаковой - подаче жидкости в обе пары цилиндров ианол.нительного звена, а следовательно, усложняется .размещенной к плоокости чертежа под углом 45°. При этом одновремвнйо поворачивается крестовина 5 на осях 4 и исполнительное звено 7 на осях 6, поворачивающихся вместе с крестовиной 5, таким образом крестовина одновременно поворачивается вокруг двух осей 4 и 6.
Исполнительное звено может поворачиваться в заданное положение постепенно-: сначала, наприме р, в плоокости чертежа, а затем в плоскости, ей перпендикулярной. Это упрощает систему управления механизмом щарнира, так как исключается точная дозировка подачи жидкости в пары гидроцилиндров, но при этом удлиняется путь исполнительного звена и ухудшается маневренность, так .как траектория движения уже будет не прямая, а ступенчатая.
Шарниры для крепления штоков 13 с исполнительным звеном 7 могут раз(мещаться как против оси крестовины, так и между ними. При несимметричном расположении шарниров Между осями крестовины работа механизма аналоги1чна, меняется только вращение крестовины относительно корпуса и исполнительного звена, а следовательно усложняется система управления с датчиками по углу поворота.
При наличии одной -пары гидроцилиндров с шарнирами, раоположеннькми на центральном угле крестовины, равном 90°, работа механизма аналогична.
Таким образом, механизм шарнира независимо от числа пар гидроцилиндров ojgecneчивает управляемое перемещение исполнительного звена по сфернческой поверхности.
Предмет изобретения
Механизм щарнира манипул.чтора, корпу.: которого шарнирно соединен с наполнительным звеном и приводными звеньями переменной длины, отличающийся тем, что, с целью повышения маневренности, корпус снабжен жестко закрепленным на нем стержнем, свободный конец которого несет крестовину, шарнирно соединяющую исполнительное звено с корпусом.
Фиг f
Вид f

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ШАРНИРА МАНИПУЛЯТОРАВ П ТБ | 1972 |
|
SU422580A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНАВСЕСОЮЗНАЯnATEHTHO-TEXH^^iECri^r | 1970 |
|
SU282800A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| ЗАПЯСТЬЕ МАНИПУЛЯТОРА | 1972 |
|
SU428934A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| КОНВЕЙЕР ГОРНОЙ МАШИНЫВсесоюзнаяпатентно-техм,...ссная ^иблиотена МР;д | 1970 |
|
SU259007A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ДЛЯ АГРЕГАТОВ | 1970 |
|
SU272235A1 |
| Устройство для стабилизации прямолинейного движения прицепной асимметричной машины | 2023 |
|
RU2819375C1 |
| КОНТЕЙНЕРОВОЗ«Г- ('" | 1972 |
|
SU357129A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |