1
Ilj(;6pCiXHiie огиосится к области сварки, ToHiee к устройствам дли в)111ие 111я изделии ор.и сварке.
И;зие(пе11 манипулятор для вращения и иродолынио .перемещения инлнндрическн.х илделии, содержащий ролнкоопоры, усглиивлен.иые на раме с возможностью ловорота отн(г1(те.1Ь)1о исп, )11ер 1енднку. ярном оси BpaJueHiiH роликов и .расноложемной с указанной осью в одной илоскости, прньод 1зран1е1И1я роликов и механизмы HCxBujioia )0;iiiKt)()nop.
Предложенный манинуд ггор oivuiiaeicM от известного 1ем, что с нелыо ||0 ьниения производи гельлости ири Вран1енл11 cijiepiiierKii.x резервуаров нрн иснользованин роликоонор, каждая из которых соде)1Ж)1г 11ескол1,ки роликов, расло.)1ых но разные cropoui i ит оси ноп.рота |)(х1икоо110)ы, причем нриводпыми вынолнена только часть роликов, разме1нен.ЦЫ.Х но одну сторону от зтой ООН, а ненриводные риликооноры кинематически связаны иоHaipHO с приводными онорами посфедством механ,нзм(лв .-поворота роли-коонор. При это.м .механизм iHOBopora .каждой ролнкооиоры выполнен .в виде зубчато-реечной :иередачи с рейками, взаимодействующими со итока.ми гидроцилиидров, полости которых у нри водных роликоопор соединены .между собой и иопарно связаныС полостями гидроцилиндров ненрИ водных опор.
Такой манипулятор обеспечивает возможность вращения сферического резервуара вокруг вертикальной, горизонтальной и наклонных осей без иробуксовки роликов.
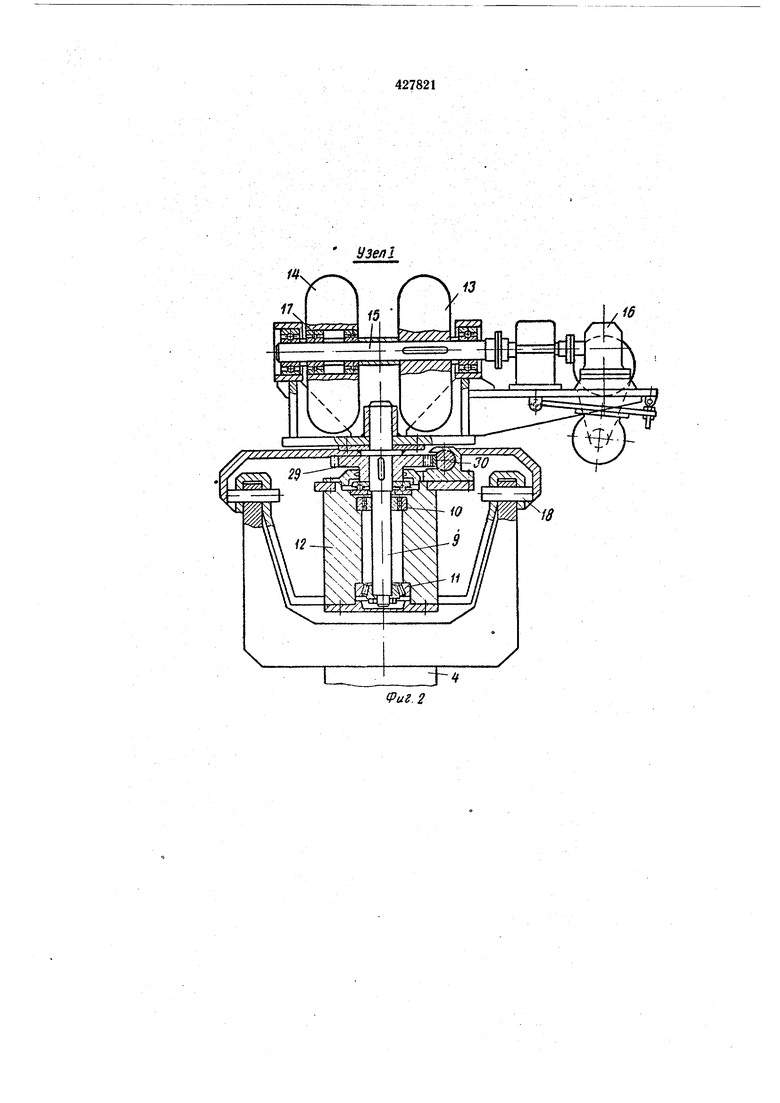
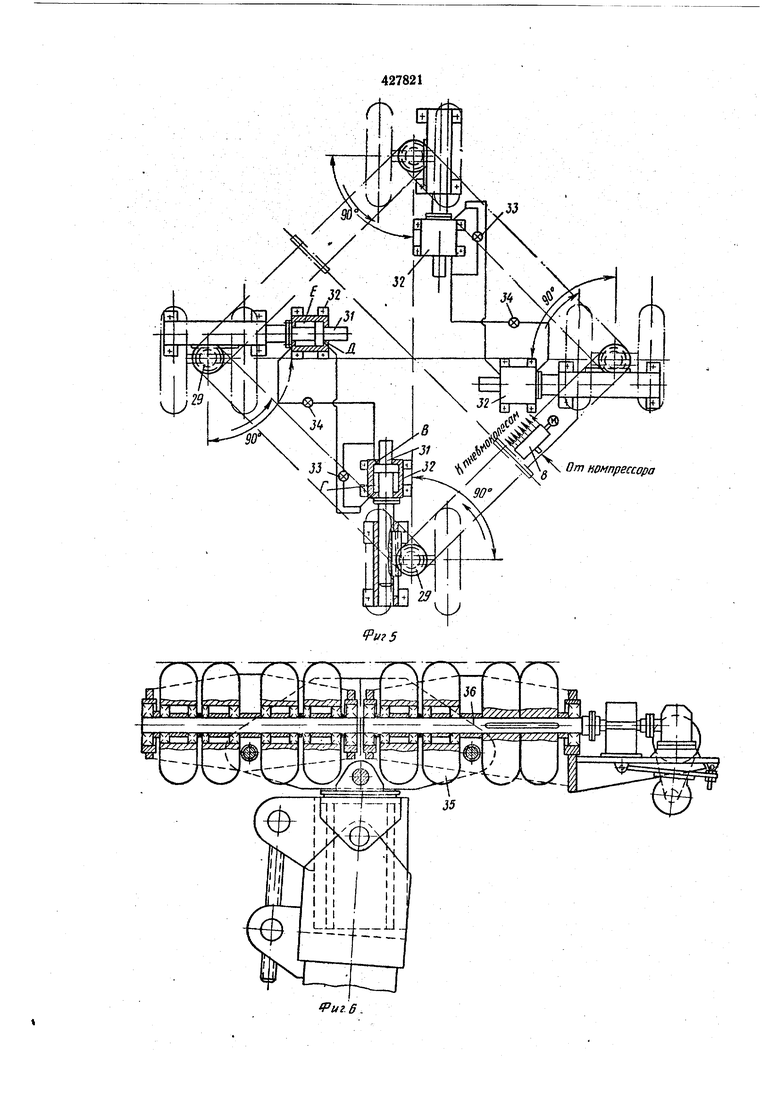
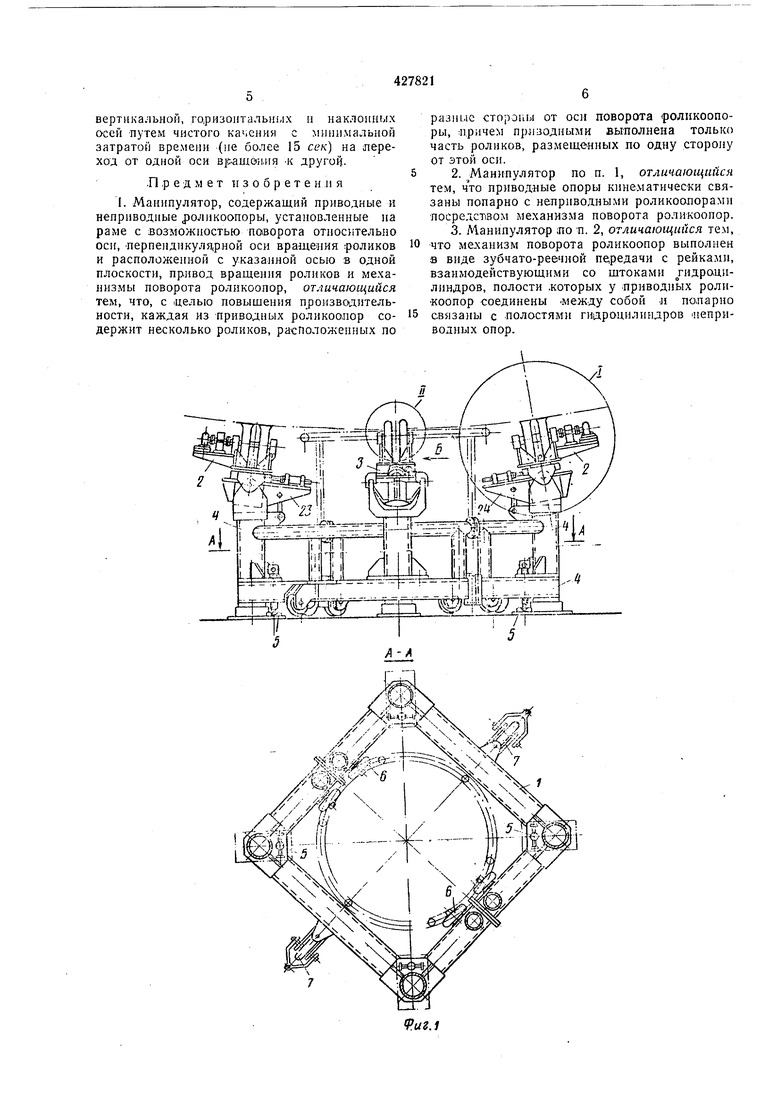
На фиг. 1 показан манипулятор, обпип вид и разрез по А-А; на фиг. 2 - узел I на фиг. 1; на фиг. 3 иоказан ннд но ст1)елке К на фи1. I; ла фиг. 4 - узел П на фиг. 1; на фиг. 5 - киие.матическая и .гидравлическая схемы манииулятара; ,на фиг. 6 дан вариант нснолнення узла 1; на фиг. 7 показаны положенИя роликоонор нри вращении резервуара вокруг любых осей.
Ман1гнулятор содержит раму }, которая вынолнена разъемной нз двух П(ктовнн, H|.IIводныо 2 и иенриволные ро.чпкоопоры и стойки 4. .На раме / установлены -четыре винтовых домкрата 5 и колеса . Jчaждaя иоловина ра-мы / имеет но одному поворотному колесу 7. .На ра.ме 1 расположена раснределительная коробка 8 с манометров ai штунерами .для одновременной подач.и возду.ха к роликам и штунера.м с обратным кла:паном, связанны.м с компрессором.
Приводная роликоопора 2 имеет ось поворота 9, расположенную в подшипниках 10 и 11 корпуса 12 симметрично между чет.иымн роликами 13 и 14. Роли.к 13 жестко сидит на оси 15, которая снабжена электромеханическим приводом 16 вращения. Ролик 14 сидит
aia оси 15 a подшипниках 17. Приводные и иелрлводные роликоопоры 2 н 3 .цапфами 18 закреплены на стойках 4. Стойки 4 снабжены щеками J9, в которых расположена ось 20, через отверстие которой лроходит винтовая стяжка 21. Конец стяжки 2/ закреплен в отверстии оси 22, 1которая расположена в щеках 23 м 24 корпуса 12. Ролики 25 .неприводной роликоопо ры 3 сидят на оси 26 в подшипниках 27. Неприводная роликоопора 3 имеет, ось поворота 28. На осях поворота 9 н 28 жестко установлена шестерня 29, взаимодействующая с рейкой 30, которая расположена в корпусе 12. Рейка 30 связаиа со штоком 31 двухштокового гидроцилиндра 32, который установлен на корпусе 12. Полости В и Г гидроцил.иидров 32 связаны между собой и имеют залорный .кран 33, кроме того, полости В ,и Г гид родилиидров 32 приводных роликоопор 2 inonapHo связаны с полостями Д и Е гидроцилиндров 32 неприводных роликоопор 3, т. е. полость в связа на с полостью Е, а полость Г -- с полостью Д, и та-кже имеют запорный кран 34.
Лрл сооружении резервуаров большого веса применяют М1 гогоколесную конструщию ведущих и ведомых роликоопор, состоящих, например, из восьми колес 35, два из которых жестко сидят на оси 36, а остальные в подщнпниках (фиг. 7).
Манипулятор работает следующим образом.
Под собранный па инвентарной опоре сферический резервуар транспортируют и располагают две ;половины рал1ы / с установленными ла ней роликоопора.ми. Скрепляют две половины рамы / между собой. Домкратами 5 уста1наВлнвают Л1анипулятор в требуемое положение, при это.м вывешивают колеса 6 я 7 и с 1юмои1ью подкладок под раму разгружают :До.мкраты.
Родикоопоры 2 п 3 разворачивают IB положение вращения резервуара вокруг вертикальной оси |(фиг. 7,в). Винтовыми стя}кками 2 наклоняют .корпус 12 таким образом, чтобы оси поворота 9 приводных роликоолор 2 и оси поворота 2.8 ведомых роликоопор 3 были ориентировочно направлены в геометрический центр .резервуара. После подъема резервуара роликами с инвентарной опоры оси поворота 9 и 28 самоустана1вливаются точно в центр резервуара. Это положение фиксируется стяжками 21. Подъем резервуара обеспечивается о;1.нпнремеиной подачей воздуха во все ролики, связанные шлангами с раздаточной .коробкой 8. Подача воздуха .в ролики нроиз,водитс}1 до требуемого давления, которое заиис гг от веса и жесткости оболочки сферического резервуара, обеспечивая требуемый зазор между резервуаром и инвентарной опорой для авободного его вращения. Устанавливают pe epByaip на сварку стыка так, чтобы плоскость стыка была перпендикулярна оси вра цения (фиг. 7,а). Включают электромеханические приводы 16 вращения ведун их роликов при закрытых кранах 33 и 34 и поворачивают резервуар на 360°, сваривая при этом два диаметрально №роти:во.полож1ных стыка. Так как
все сферические резервуары имеют количество лепестков, кратное четырем (16, 24, 28 и т. д.), то производят сварку следующих двух стыков, расположенных П01Д 90° к предыдущим.
Для этого открывают .краны 34 при закрытых кранах 33, включают электромеханические приводы 16 вращения и производят одновременный разворот всех роликов на 90°. (При включении приводов .16 приводные ролики обкатываются вокруг оси поворота 9 относительно неподвижного резер вуара. Шестерня 29 перемещает рейку 30, связанную со щтоком 3,1 гидроцилиндра 5.2, перегоняя масло из полости Г в полость Д гидроцилиндра
32, расположенного на корпусе 12 приводной роликоопоры 3. Масло .перемещает щток цилиндра, связанный с рейкой, .которая, взаимодействуя с шестерней, поворачивает ось поворота 28 ведомой роли-коопоры .на угол 90°
(фиг. 7,6). Закрывают краны 34, включают приводы 16, производят поворот -резервуара на 360° вокруг горизонтальной оси, повернутой на 9.0° по отношению к предыдущей, осуществляя сварку двух диаметрально лротиво1ПОЛОЖНЫХ стыков.
Для перехода к следующему стьжу поворачивают резервуар вокруг вертикальной оси на соответствующий угол (фиг. 7,в). Для этого огк.рывают краны 34 ;при закрытых кранах
33 и включают приводы 16 в обратном направлении. При этом приводные ролики обкатываются вокруг оси поворота 9 в обратном направлении на 90°. При этом масло из нолостн В перетекает в полость Е, и .происходит
разворот неприводиых .роликов в обратном направлении также на 90° (фиг. 7,а). Затем закрывают краны 34, открывают краны 33, включают привод 16 и поворач.ивают приводные ролики па 90° (фиг 7, в).
При этом /приводные ролик}| обкатываются BoiKpyr оси поворота 9 относительно неподвижного резервуара, шестерня 29 перемещает рейку 30, связанную со штоком 31 пилиндра 32, перегоняя масло из полости Г в аюлость В.
Закрывают краны 33, в.ключают привод ,16, про.изводят вращение резервуара вокруг вертикальной оси на требуемый угол. Производят сварку стыков, вращая резервуар вокруг взаилпю нернендикулярных горизонтальных осей. Для сварки кольцевых стыков резервуар вращаюг вокруг наклонной оси (фиг. 7,г).
Для этого открывают Краиы 33, включают привод .16 и поворачивают приводные роликоопоры 2 на угол, соответствующий углу на.клона оси вран1,ения. Закрывают краны 33, включают приводы 16 и вращают резервуар вокруг наклонной осн. При этом скорости вращения приводных роликов всегда одинаковы.
Таким образом, резервуар вращают вокруг
вертикальной, горизонтальных н наклонных осей Путем чистого качения с мипима.тьной затратой времени (не более 15 сек) на лереход от одной оси вр-ашоггия -к другой.
Предмет изобретения
I. Маннпулятор, содержащий приводные и ненриводные роликоопоры, установленные на раме с возможностью поворота относительно оси, перпендикуля.рной оси врашелия роликов и располол енной с указанной осью в одной плоскости, привод вращення роликов и механизмы поворота роликоопор, отличающийся тем, что, с |Целью повышения производительности, каждая из приводных роликоолор содержит несколько роликов, расположенных по
разные стороны от оси поворота (ролпкоопоры, 1Нричем прлзодными выполнена только часть роликов, размещенных по одну сторону от этой оси.
2. Манипулятор по п. 1, отличающийся тем, что приводные опоры кинематически связаны попарно с неприводными роликоолорам) посредст1вом механизма поворота роликоопор. 3. Манипулятор :по л. 2, отличающийся тем,
что механизм поворота роликоопор выполнен S виде зубчато-реечной пе,редачи с рейками, взаимодействующими со щтоками гидрацилиндров, полости .которых у приводных роликоопор соединены Между собой -и поларно
связаны с полостями гидроцилиндров иеприводных опор.
А-А
16
Видб
8 .,

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для изготовления сферических резервуаров | 1980 |
|
SU869174A1 |
| РОЛЬГАНГ-МАНИПУЛЯТОР | 1970 |
|
SU284220A1 |
| УСТРОЙСТВО ДЛЯ БЕЗОТХОДНОЙ ТЕРМИЧЕСКОЙ РЕЗКИ ЗАГОТОВОК ИЗ ТРУБ | 1991 |
|
RU2071399C1 |
| РОЛЬГАНГ ДЛЯ ПРОДОЛЬНОГО ПЕРЕМ1ЕЩЕНИЯ И ВРАЩЕНИЯ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1972 |
|
SU432055A1 |
| СЕКЦИЯ РОЛИКООПОР | 1996 |
|
RU2098252C1 |
| Стенд для сборки обечаек с продольным швом | 1976 |
|
SU610646A1 |
| Установка для электрошлаковой сварки | 1972 |
|
SU475235A1 |
| Манипулятор для изготовления сферических резервуаров | 1980 |
|
SU925611A1 |
| Стенд для сборки под сварку | 1986 |
|
SU1425018A1 |
| МАНИПУЛЯТОР ДЛЯ ВРАЩЕНИЯ ШАРОВЫХ РЕЗЕРВУАРОВВСЕСОЮЗНАЯЛДТ!^йТНО-;1ХКк''гПНДЯ| | 1972 |
|
SU340498A1 |