Изобретение относится к области сварки, в частности к оборудованию для перемещения н ориентации путем поворота плоских листовых конструкций и изделий с криволинейным профилем.
Известен рольганг-манипулятор, содержащий раму, на которой расположены две группы роликоопор, жестко закрепленных на приводных валах, оси поворота которых взаимно перпендикулярны в горизонтальной плоскости.
Однако при этом изделие можно .перемещать лишь во взаимно перпендикулярных направлениях и невозможно осуществлять стыковку двух деталей со взаимным смещением.
С целью повыщения производительности за счет возможности разворота изделия и его перемещения в горизонтальной плоскости в любом направлении в предлагаемом устройстве одна группа валов с роликоопорами разбита на две одинаковые подгруппы, каждая из которых снабжена самостоятельным приводом, причем каждая роликоопора выполнена в виде жестко закрепленных на одном основании со смещением друг к другу под углом 45° двух параллельных крестовин, причем на каждой крестовине между ее крыльями свободно установлены бочкообразные ролики, оси поворота которых расположены в плоскости, перпендикулярной оси поворота роликоопоры. Все роликоопоры могут быть выполнены одного диаметра, для чего валы одной группы разбиты на секции и связаны с соответствующим приводом через распределительное устройство. При разных диаметрах роликоопор валы последних, имеющих меньщий диаметр, располол ены над валами роликоопор с большими диаметрами.
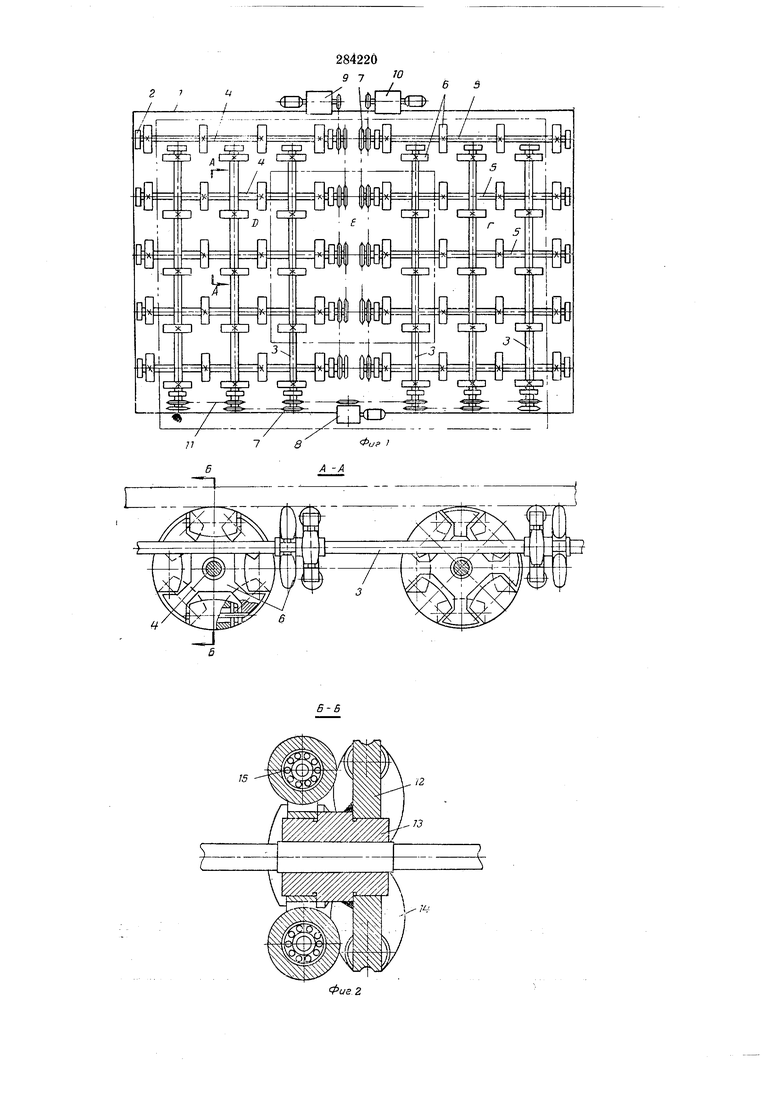
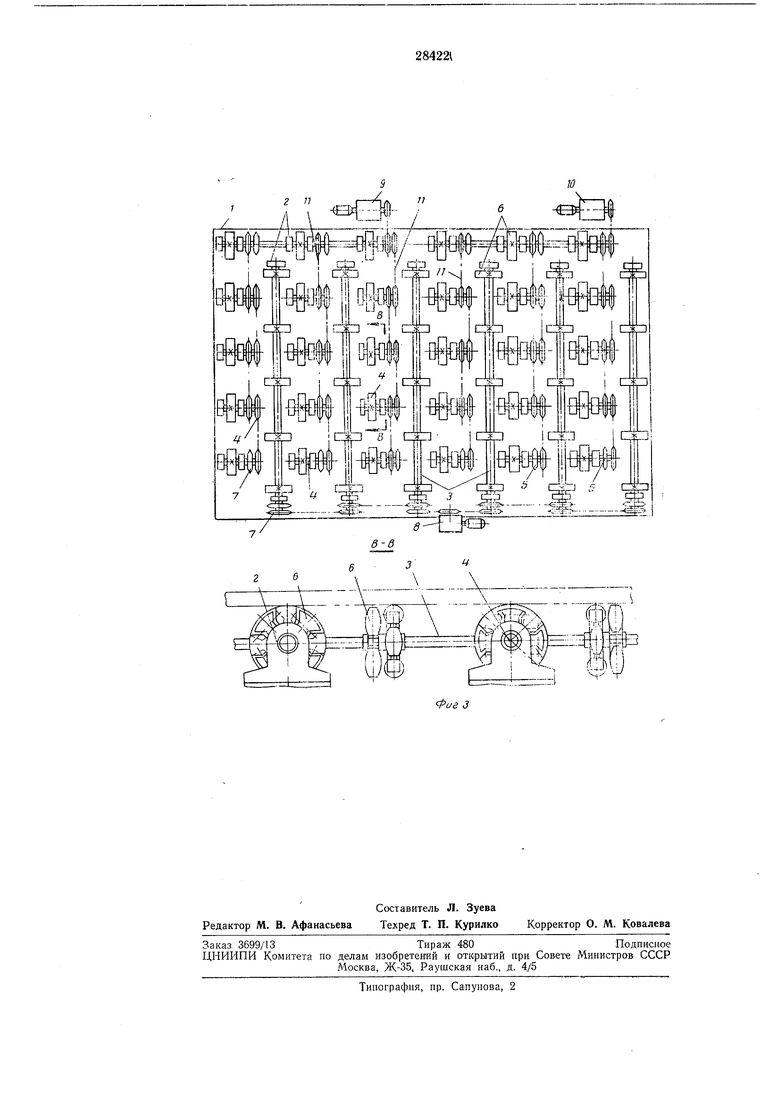
На фиг. 1 изображена кинематическая схема предлагаемого рольганга-магишулятора с роликоопорами различного диаметра, штрихпунктирными линиями дано возможное полоЛсение транспортируемого изделия; на фиг. 2- разрез по Л-А на фиг. 1; на фиг. 3 изображена кинематическая схема предлагаемого рольганга-манипулятора с роликоопорами одлого диаметра; штрих-пунктирной линией иоказано транспортируемое изделие.
Предлагаемый рольганг-манипулятор содержит раму 1 с установленными на ней в подщипниковых опорах 2 группами валов 3, 4 и 5. На этих валах жестко закреплены роликоопоры 6, на конце каждого вала насаж;ены звездочки 7, через которые валам передается вращательное движение от приводов 8, 9 и 10.
При варианте с различными диаметрами роликоопор группа валов 3 с меньшими диаметрами роликоопор расположена над группой валов и 5 с большими диаметрами роликоопор, что дает возможность разместить под .прямым углом роликоопоры по всему манипулятору с совмещением их вершин в одной плоскости.
При варианте с одинаковыми роликоопорами все грунны валов расположены иа одном уровне, а привод каждой группы валов 4 и 5 роликоопор 6 (фит. 3) выполнен в виде последовательного соединения цепью 11.
Роликоопоры 6 представляют собой две крестовины 12, приваренные к общему основанию 13 со смещением на 45° бочкообразных роликов 14, свободно вращающихся в подшипниках 15 в плоскости, перпендикулярной оси вращения крестовин.
Рольган-манипулятор работает следующим образом.
Находящееся на рольгане-манипуляторе изделие перемещается в зависимости от направления вращения групп валов , 4 и 5. При включении привода 8 труппы валов 3 изделие перемещается к труппе валов 4 или 5, в зависимости от направления вращения привода.
При включении привода 9 группы валов 4 изделие поворачивается вокруг точки Г в ту или иную сторону, в зависимости от направления вращения привода 9.
При включении привода 10 группы валов 5 изделие поворачивается -вокруг точки Д в ту или иную сторону, в зависимости от направления вращения привода 10.
При вращении валов 4 и 5 в противоположные стороны изделие поворачивается вокруг центра Е манипулятора от О до 360°.
При вращении валов 4 и 5 в одном направлении изделие перемещается параллельно длине валов 5.
При включении приводов 5 и 9 валов 5 и 4 изделие будет перемещаться под углом по отношению к валам.
При равиых линейных скоростях роликоопор валов 9 и 4 изделие перемещается под
углом 45°. Придавая роликоопорам валов 3 и 4 различные линейные скорости, изделие можно перемещать под любым углом по отношению к валам.
Предмет изобретения
1.Рольганг-манипулятор, содержащий раму, на которой установлены две групны роликоопор, жестко закрепленных на приводных валах, оси поворота которых взаимно перпендикулярны, отличающийся тем, что, с целью повышения (Производительности путем .возможности разворота изделия и его перемещения в горизонтальной плоскости в любом направлении, одна из групп разбита на две равные подгруппы, каждая из которых снабжена самостоятельным приводом, причем роликоопора выполнена в виде двух
параллельных жестко закрепленных на одном оанова,нии со смещением Одиой к другой под углом 45° крестовин, при этом на каждой крестовине ее крыльями свободно установлены бочкообразные ролики, оси поворота
которых .расположены в плоскости, перпендикулярной оси поворота роликоопоры.
2.Рольгаиг-манипулятор по п. 1, отличающийся тем, что роликоопоры обеих групп выполнены одинакавыл диаметром, для чего валы одной из фуйп разбиты на 1секции и связаны с соответствующнм приводом через р аапр едел ит ел ьн ое у стр ой ст во.
3. Рольганг-ма.нипулятор ло п. 1, отличающийся тем, что роликооноры обеих групп выполнены с разными диаметрами, для чего валы роликоопор с меньшими диаметрами расположены над валами роликоопор /с большими
диаметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликоопора | 1979 |
|
SU854830A1 |
| Роликоопора рольганга | 1977 |
|
SU680950A1 |
| РОЛЬГАНГ ДЛЯ ПРОДОЛЬНОГО ПЕРЕМ1ЕЩЕНИЯ И ВРАЩЕНИЯ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1972 |
|
SU432055A1 |
| СВАРКИ ТРУБ В СЕКЦИИ ТРУБОПРОВОДА | 1972 |
|
SU348338A1 |
| Роликоопора рольганга | 1985 |
|
SU1293081A1 |
| МАШИНА ДЛЯ УКЛАДКИ ШТУЧНЫХ ГРУЗОВ НА ПОДДОНЫ | 1966 |
|
SU184712A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ОБРАБОТАННЫХ ЛИСТОВЫХ | 1973 |
|
SU368075A1 |
| Роликоопора рольганга для ориентированной подачи изделий | 1980 |
|
SU901183A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU427821A1 |
15
2 Л
