Изобретение относится к судостроению и может быть использовано в исполнительных механизмах электрогидравлического следящего привода автоматического управления объектами, например органами стабилизации движения судов.
Известны исполнительные механизмы аналогичного назначения, содержащие последовательно расположенные силовые цилиндры с порщиямн, соединенными о.бщим штоком, и гидравлически связанные с управляющим устройством.
С целью повыщения эффективности в предлагаемом механизме силовые цилиндры снабжены .клапаном, выполненным в виде многопорщневого золотника, межпоршневые полости которого Зашунтированы между собой перепускными трубопроводами и связаны с полостями одного силового цилиндра, при этом крайние полости связаны с полостями другого силового цилиндра, обеспечивающими автоматическое щунтирование полостей одного цилиндра и последовательное включение обоих цилиндров при определенной величине знещней нагрузки.
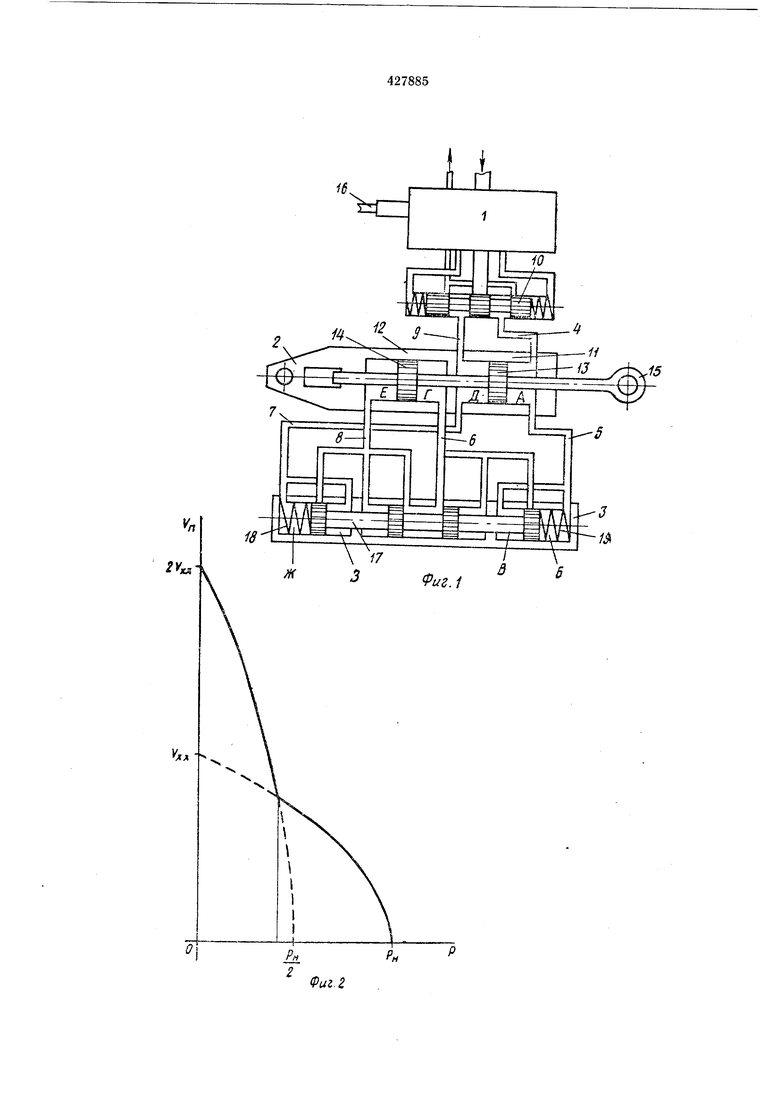
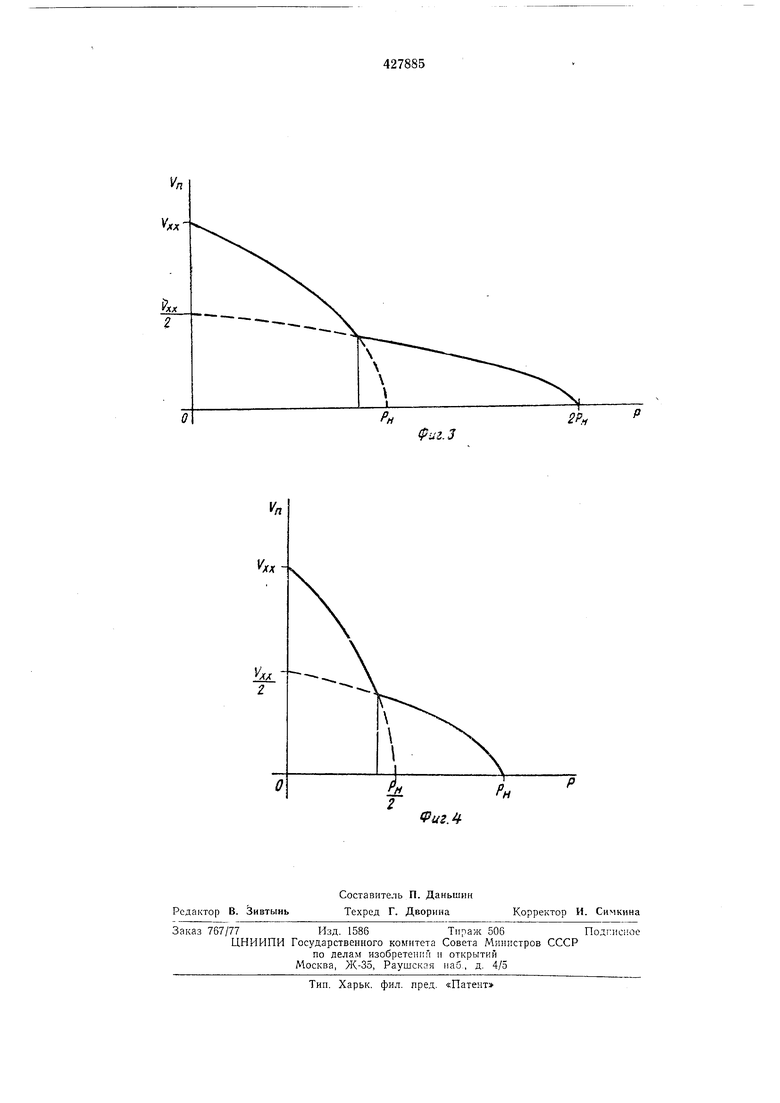
На фиг. 1 изображена схема электрогидравлического следящего привода с исполнительным механизмом; на фиг. 2 - график функциональной зависимости скорости движения порщня от изменения внешней нагрузки
при полном открытии щелей распределительного золотника для привода, обеспечивающего автоматическое увеличение скорости движения лорщня на .холостом ходу при сохране.НИИ параметров раб.очей жидкости в гидросистеме питания привода и тягового усилия; на фиг. 3 - графиК функциональной зависимости скорости движения порщня от изменения в,нещней нагрузки при полном открытии щелей распределительного золотника для привода, Обеопечивающего автоматическое увеличение тягового усилия при сохранении параметров рабочей жидкости в гидросистеме питания привода и скорости холостого хода; на
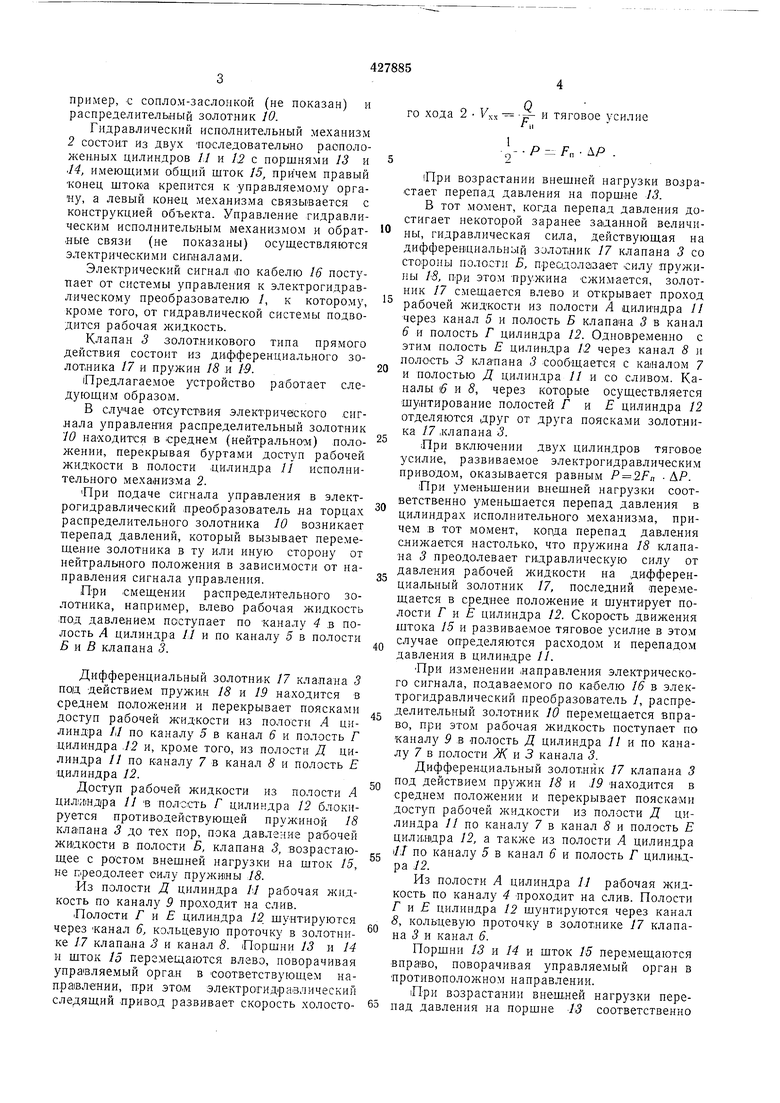
фиг. 4 - график функциональной з.ависимости скорости движения порщня от изменения внещней нагрузки при полном открытии щелей распределительного золотника для привода, обеспечивающего уменьшение расхода ра-. бочей жидкости в гидросистеме питания привода при сохранении тягового усилия и скорости холостого .хода.
Электрогидравлический следящий привод состоит из электрогидравлического преобразователя /, гидравлического исполнительного механизма 2, клапана 3 и каналов 4-9.
Злектрогидравлический преобразователь содерл ит электрогидравлический управляющий элемент, гидравлический усилитель, например, с соплом-заслоикой (не показан) и распределительный золотник 10.
Гидравлический исполнительный механизм 2 состоит из двух последовательно ра.ополол енных цилиндров // и 12 с поршнями 13 и 14, имеющими общий щток /5, причем правый конец щтока крепится к управляемому органу, а левый конец механизма связывается с конструкцией объекта. Управление гидравлическим исполнительным механизмом и обратные связи (не показаны) осуществляются электрическими сигналами.
Электрический сигнал по кабелю 16 поступает от системы управления к электрогидравлическому преобразователю /, к которому, кроме того, от гидравлической системы подводится рабочая л идкость.
Клапан 3 золотникового типа прямого действия состоит из дифференциального золотника 17 и пружин 18 и 19.
Предлагаемое устройство работает следующим образом.
В случае отсутствия электрического сигнала управления распределительный золотник 10 находится в среднем (нейтральном) положении, перекрывая буртами доступ рабочей жидкости в полости .цилиндра 11 исполнительного механизма 2.
При подаче сигнала управления в электрогидравлический преобразователь на торцах распределительного золотника 10 возникает перепад давлений, который вызывает перемещение золотника в ту или иную сторону от нейтрального положения в зависимости от направления сигнала управления.
При смещении распределительного золотника, например, влево рабочая жидкость под давлением поступает по каналу 4 в полость Л цилиндра // и по каналу 5 в полости Б и В клапана 3.
Дифференциальный золотни-к /7 клапана 3 под действием пружин 18 и 19 находится в среднем положении и перекрывает поясками доступ рабочей жидкости из полости А цилиндра /i/ по каналу 5 в канал 6 и полость Г цилиндра 12 и, кроме того, из полости Д цилнндра 11 по каналу 7 в канал 8 и полость Е цилиндра 12.
Доступ рабочей жидкости из полости А цилянд ра /У В полость Г цилиндра 12 блокируется противодействующей пружиной 18 клапана 3 до тех пор, пока давление рабочей жиакости в полости Б, клапана 3, возрастающее с ростом внещней нагрузки на шток 15, не п реодолеет силу прул ;и1ны 18.
Из полости Д цилиндра /7 рабочая жидкость по каналу 9 про.ходит на слив.
.Полости Г и Е цили.ндра 75 щунтируются через канал 6, кольцевую проточку в золотнике 17 клапана 3 и канал 8. Поршни 13 и 14 н щток 13 перемещаются влево, поворачивая управляемый орган в соответствующем направлении, при это,м электрогидразлический следящий привод развивает скорость холостого хода 2 УХХ f- и тяговое усилие
Гм
.
|При возрастании внещней нагрузки возрастает перепад давления на поршне 13.
В тот момент, когда перепад давления достигает некоторой заранее зааанной величины, гидравлическая сила, действующая на дифференциальный золотник 17 клапана 3 со стороны полости Б, пресаолэзает силу пружиlibi 18, цри этом пружина сжимается, золотник 17 смещается влево и открывает проход
рабочей л идкости из полости А цилиндра // через канал 5 и пол.ость Б клапана 3 в канал 6 и полость Г цилиндра 12. Одновременно с этим полость Е цилиндра 12 через канал 8 и полость 3 клапана 3 сообщается с ка1налом 7
и полостью Д цилиндра // и со сливом. Каналы 6 и 8, через которые осуществляется щунтирование полостей Г и цилиндра 12 отделяются друг от друга поясками золотника 17 .клапана 3.
При включении двух цилиндров тяговое усилие, развиваемое электрогидравлическим приводом, оказывается равным &.Р.
При уменьшении внешней нагрузки соответств.енно уменьщается перепад давления в цилиндрах исполнительного механизма, причем в тот момент, когда перепад давления снижается настолько, что пружина 18 клапана 3 преодолевает гидравлическую силу от давления рабочей жидкости на ди.фференциальный золотник 17, последний перемещается в среднее положение и и1унтирует полости Г н Е цилиндра 12. Скорость движения штока /5 и развиваемое тяговое усилие в этом - случае определяются расходом и перепадом давления в цилиндре //.
При изменении направления электрического сигнала, подаваемого по кабелю 16 в электрогидравлический преобразователь /, распределительный золотник 10 перемещается вправо, при этом рабочая жидкость поступает по каналу 9 в полость Д цилиндра 11 и по каналу 7 в полости Ж и 3 канала 3.
Дифферен.циальный золотник 17 клапана 5
под действием пружин 18 и .19 находится в среднем положении и перекрывает поясками доступ рабочей жидкости из полости Д цилиндра // по каналу 7 в канал 8 и полость Е цилиндра 12, а также из полости А цилиндра
С if по каналу 5 в канал 6 и полость Г цилиндОу .-ч
ра J2.
Из полости А цилиндра 11 рабочая жидкость по каналу 4 проходит на слив. Полости Г и Е цилиндра 12 шунтируются через канал 8, кольцевую проточку в золотнике 17 клапана 5 и канал 6.
Поршни 13 и 14 т шток 15 перемещаются вправо, поворачивая управляемый орган в противоположном направлении.
При возрастании внещ.ней нагрузки перепад давления на поршне 13 соответственно возрастает, причем в тот момент, когда он достигает некоторой заранее заданной величины, гидравлическая сила, действующая на дифференциальный золотник 17 клапана 3 со стороны полости Ж, -преодолевает силу пружины 19. В результате этого пружина сжимается, золотник 17 смещается вправо и открывает проход рабочей жидкости из полости Д цилиндра 11 через канал 7 и полость Ж клапана 3 в канал 8 и полость Е цилиндра 12. Одновременно с этим полость Г цилиндра 12 через -калал 6, полость В клапана 3 сообщается с каналом 5 и полостью А цилиндра /:/ и со сливом. Каналы б и 8, через которые осуществлялось шунтирование полостей Г и цилиндра 12, отделяются друг от друга поясками золотника 17 клапана 3. При уменьшении внешией нагрузки перепад давления ,в -цилиндрах исполнительного механизма уменьшается, причем в тот момент, когда он снижается настолько, что пружина 19 клапана 3 оказывается в состоянии преодолеть гидравлическую силу от давления рабочей жидкости на дифференциальный золотник 17, последний перемещается в среднее положение и щунтирует полости Г и цилиндра 12. Внешняя характеристика привода, т. е. зависимость Уп f(P), (фиг. 2), представляет (при последовательном включении цилиндров 3 работу) ломаную ;кривую. Первый (верхний) участок этой кривой есть внещняя характеристика привода при работе одного цилиндра (другой зашунтирова-н). Второй участок кривой изображает внешнюю характеристику привада при одновременной работе двух цилиадров. Точка излома внешней характеристики привода при последовательном включении цилиндров соответствует перепаду давления в цилиидрах Привода, составляющему приблизительно 43% от давления питания. В тех случаях, когда возникает необходимость при сохранении параметров рабочей жидкости в гидросистеме питания привода и скорости холостого хода увеличить тяговое усилие, предлагаемый привод выполняют с больщей площадью поршней. В этих случаях электрогидравлический следящий привод развивает скорость холостого ходаVxs п и тяговое усилие 2 Я 4f „ - ЛР (фиг. 3). При использовании предлагаемого привода имеется возможность уменьшить расход рабочей жидкости в гидросистеме питания привода при сохранении скорости холостого хода и тягового усилия. В этом случае привод развивает скорость Q/2 Vxx - -,; и тяговое усилие холостого хода .f п -АР (фиг. 4). Последовательное включение цилиндров может быть также использовано в электрогидравлических следящих и гидравлических приводах с числом последовательно расположенных цилинаров более двух, а для последовательного включения цилиндров может быть применено нескользко клапанов. Предмет изобретен.и я Исполнительный механизм электрогидравлического следящего привода автоматического управления объектами, например, органами стабилизации движения судов, содержащий последовательно расположенные силовые цилиндры с поршнями, соединенными общим щтоком, и гидравлически связанные с управляющим устройством, отличающийся тем, что, с целью повышения эффективности работы путем автоматического увеличения скорости движения поршня ,на холостом ходу, увеличения тягового усилия и уменьшения расхода рабочей ЖИ1ДКОСТИ, силовые цилиндры снабя ены клапаном, выполненным в виде многопоршневого золотника, межпоршневые полости которого зашунтированы между собой перепускными трубопроводами и связаны с полостями одного сило)вого цилиндра, а крайние полости связаны с полостями другого сиового цилиндра, обеспечивающими автоматическое щунтирование полостей одного цилиндра и последовательное в-ключение обоих циищдров при определенной величине внешней агрузки. 2У,и1 Фиг. 2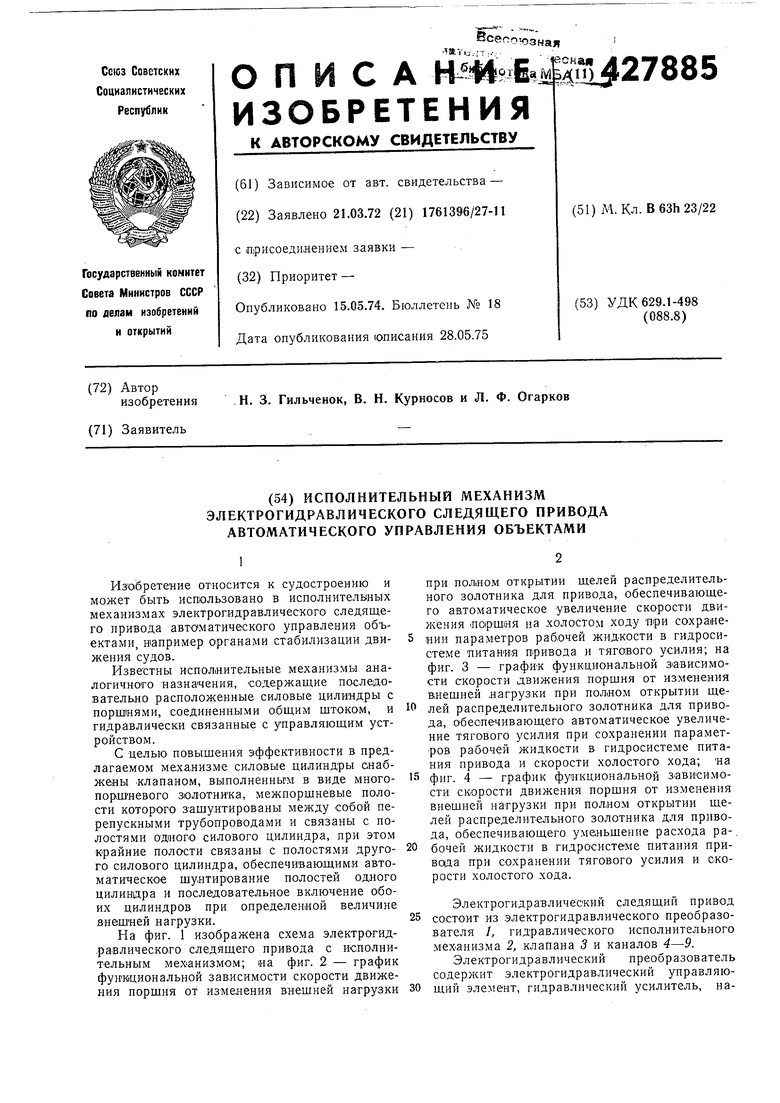
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| Электрогидравлический следящий привод системы автоматического управления органами стабилизации движения судна | 1976 |
|
SU610725A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU268855A1 |
| Гидроусилитель | 1976 |
|
SU564448A1 |