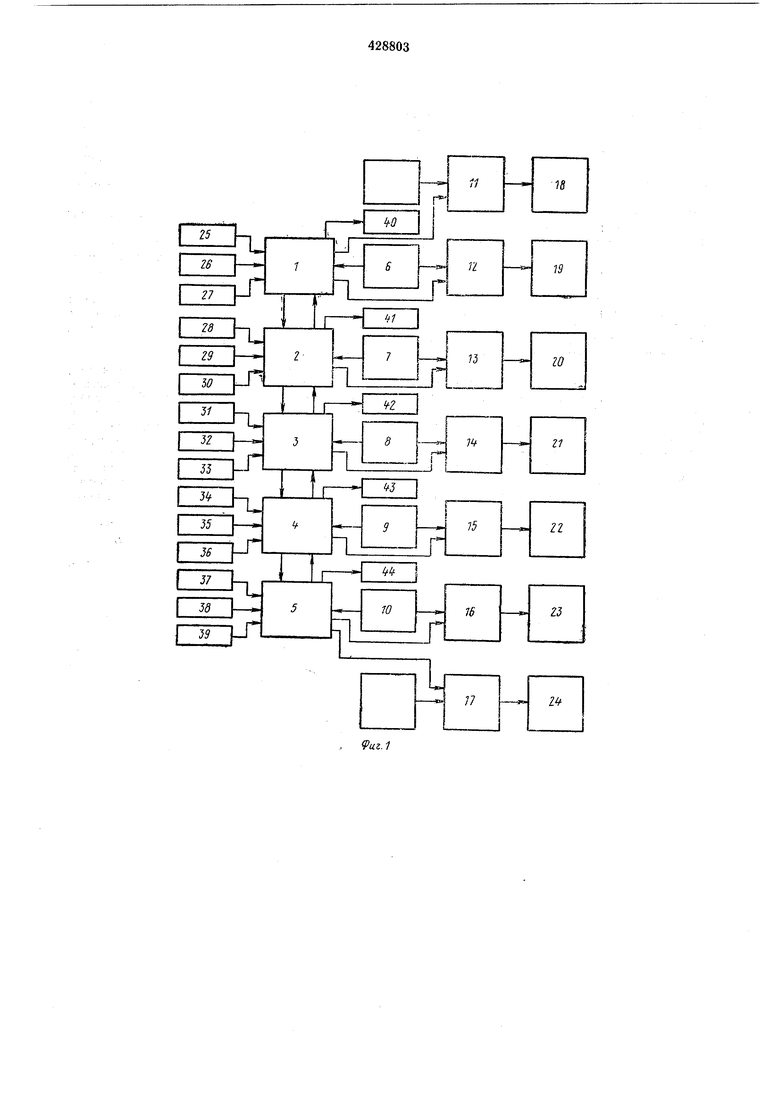
слябов (БСО), ключей управления 6-10, схем //- управления приводами загрузочных и подающих рольгангов {// и 17 - схемы управления приводами загрузочных рольгангов), приводов 18-24 загрузочных и подающих рольгангов (18 и 24 - приводы загрузочных рольгангов), датчиков 25, 28, 31, 34, 37 перемещений, соответственно на каждую секцию рольганга и фотодатчиков 26, 27, 29, 30, 32, 33, 35, 36, 38, 39 положения слябов по два на каждую секцию рольганга. Устройство имеет регистрирующие табло 40-44.
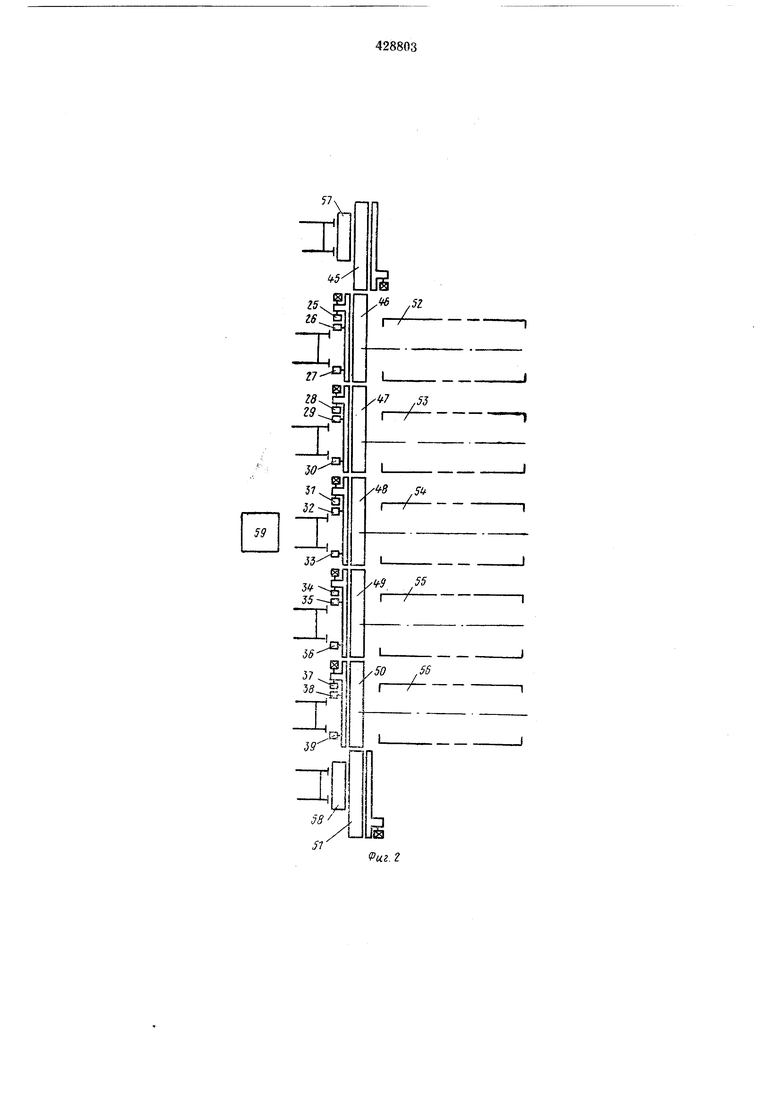
Фотодатчики положения слябов размещены по краям печей симметрично их осям на крыщках масляных редукторов и освещаются пламенем печей. Расстояние между каждой парой фотодатчнков выбирают соответственно максимально возможной длине слябов.
Датчики определения пути перемещения слябов кинематически связаны с роликами подающих рольгангов. На табло 40-44, подключенных к блокам управления симметричным остановом сляба, регистрируются состояния секций подающего и загрузочного рольгангов.
На участке загрузки методических нагревательных печей, включающем секции 45 и 51 загрузочного и 46-50 подающего рольгангов, печи 52-56, столы-раскладчики 57 и 58 и пульт оператора 59, .размещены датчики 25-39.
Участок методических нагревательных печей со стороны их загрузки оборудован несколькими расположенными в один ряд и примыкающими друг к другу секциями подающего рольганга (например, пятью секциями по количеству печей). Fla подающий рольганг слябы поступают с секций загрузочных рольгангов, примыкающих к одному или обоим концам подающего рольганга.
Методические нагревательные печи оборудованы внутри глиссажнымн трубами, по которым перемещаются продвигаемые толкателями слябы. Вновь сооружаемые методические нагревательные печи имеют щагающие балки, с помощью которых слябы перемещаются внутри печей. Толкатели используются только для установки слябов на щагающие балки. Нри загрузке слябов в печи с глиссажными трубами, особенно в печи с щагающими балками, накладываются жесткие ограничения на размещение слябов относительно труб или балок. Нарущение этих ограничений может привести к аварийной ситуации.
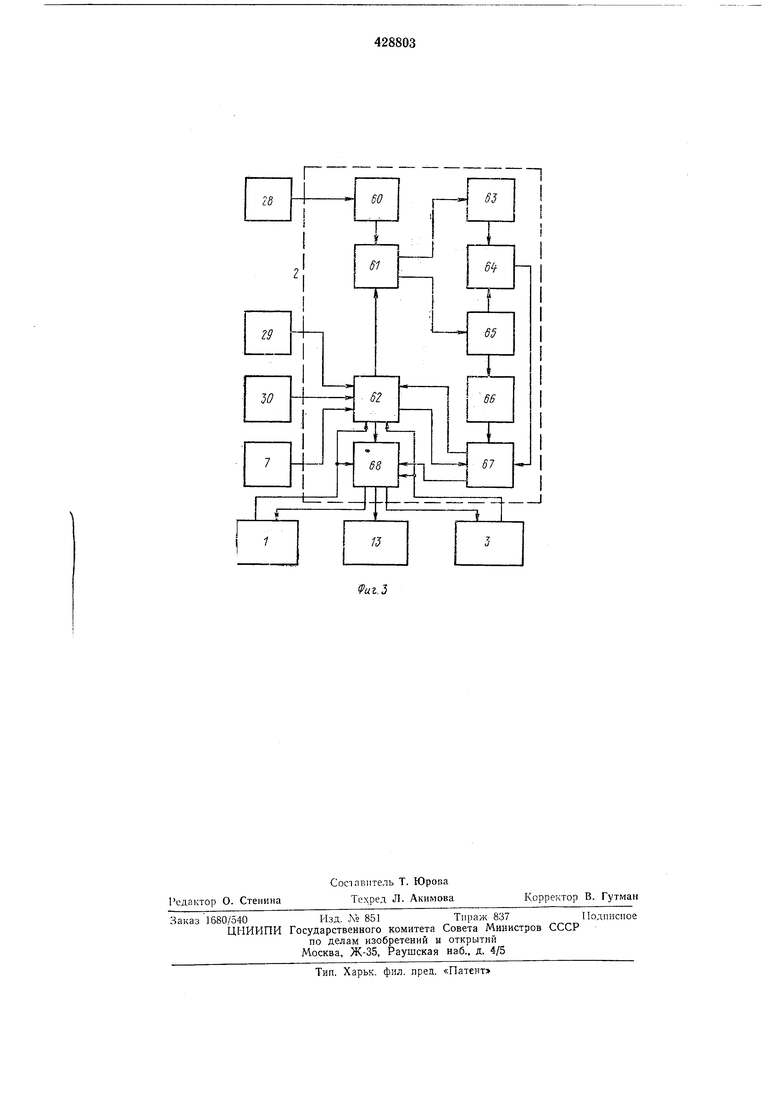
Блок симметричного останова слябов состоит из делителя частоты 60, коммутаторов 61 и 68, блока логики 62, счетчиков 63 и 65, схемы сравнения 64, дещифратора 66 и формирователя командных сигналов 67.
Программное управление работой предлагаемого устройства осуществляется ключами управления с одного или нескольких пультов операторов при помощи пуска в необходимом направлении соответствующих секций подающего и загрузочного рольгангов. После выполнения устройством автоматического симметричного останова слябов на заданных секциях
подающего рольганга ключи управления этими секциями переводятся в положе ие «Стоп, после чего можно задавать новую программу с помощью этих же ключей управления.
При включении в одном направлении нескольких смежных секций подающего рольганга, например секций 46-49 (см. фиг. 2), сляб, подаваемый с загрузочного рольганга 45,транспортируется до последней включенной в данном направлении секции 49 подающего рольганга и затем останавливается на ней симметрично оси печи 55. Останов каждого последующего сляба производится на смежных пред5 ществующих секциях подающего рольганга по мере подачи слябов с загрузочного рольганга. Одновременно с подачей слябов со стороны загрузочного рольганга 45 для останова на нескольких примыкающих к нему секциях подающего рольганга (наприме,р,,на секциях- б-49), можно проводить подачу слябов в противоположном направлении с загрузочного рольганга 51 для останова на примыкающих к нему секциях подающего рольганга (нанример на
5 секции 50). В этом случае предлагаемое устройство работает как две независимые части, одновременно выполняющие поочередный симметричный останов слябов на соответствующих секциях подающего рольганга.
В процессе транспортирования первого подаваемого сляба по секциям 46-48 подающего рольганга соответствующие БСО(например, блоки /, 2 и 5) не отрабатывают командные сигналы на понижение скорости и останов
управляемых ими секций нодающего рольганга, так как каждый из указанных БСО получает запрет на отработку командных сигналов. Сигналы запрета поступают с БСО, обслуживающих смежные секции рольганга, располоQ женные со стороны, противоположной направлению подачи слябов. Так, например, в рассматриваемом случае останова первого сляба на секции 49 подающего рольганга блок 1 получает запрет от блока 2, блок 3 - от блока 4.
5 В блок 4 с блока 5 поступает сигнал, разрещающий формирование и выдачу командных сигHHvioB, так как секция 50 подающего рольганга остановлена или включена в противоположном направлении. В результате фиксации транспортируемого сляба первым фотодатчиком 35 блока 4 со стороны подачи слябов в этом блоке производится отработка сигнала, разрещающего выполнение блоком 3 симметричного останова второго подаваемого сляба. Аналогично прн фиксации второго транспортируемого сляба первым фотодатчиком 32 со стороны подачи слябов в блоке 3 производится отработка и выдача в блок 2 сигнала, разрещающего выполнение симметричного останова сляба. Аналогично выполняется поочередной снмметричный останов сляба на секциях нодающего рольганга, число которых может быть от одной до пяти, как в рассматриваемом случае с пятью секциями подающего рольганга.
Блоки У и 5, управляющие работой приво5 ДОН крайних секций подающего рольганга (например, секций 46 и 50 при пяти секциях подающего рольганга), отрабатывают командные сигналы на цониженке скорости и останов приводов 18 и 24 секций загрузочного рольганга 45 н 51, нримыкающих к нодающему рольгангу. Отработка указанных командных сигналов, и останов соответствующих секций загрузочн.ого рольганга производится после полного перехода на подаюи1ий рольганг каждого вновь подаваемого сляба. Вхождение слябов на приемный рольганг фиксируется фотодатчиками: 26 и 39, блил айшими к секциям загрузочного рольганга, и по их сигналам в блоках, например У и 5, отсчитываются импульсы датчиков 25 и 37 определения пути перемещения слябов. на рольганге. Отсчет необходим для введения соответствующей путевой задержки в выдаче командных сигналов,.учитывающей расстояние от фотодатчиков до секций загрузочного рольганга и среднюю длину подаваемых слябов.
Если подавае1мый с загрузочного рольганга сляб перед остановом транспортируется не менее чем через две секции подающего рольганга, ближайшие к загрузочному, то автомати-, ческий пуск секции загрузочиого рольганга в результате снятия командных сигналов на понил ение скорости и останов осуществляется только .после вхождения тралспортируе.мого сляба па третью секцию подающего рольганга, считая от секции загрузочиого . Если транспортируемый сляб предназначен для останова на второй секции подающего рольганга, считая от секций загрузочного рольганга по направлению перемещения слябов (например, на секциях 47 или 49), то автоматический пуск соответствующей секцнн загрузочного рольганга осуществляется в результате снятия командных снтналов на понижение скорости и останов указанной секции загрузочиого рольганга при вхол дении сляба на указанные секции нодающего рольганга (например, секции 47 илн 49). При останове слябов на секциях подающего рольганга 46 и 50, нримыкающих к секциям загрузочных рольгангов, устройство осуществляет останов соответствующих секций загрузочного рольганга, чем ограничивается дальнейшее поступление слябов на подающие рольганги.
Каждый блок управле1И1я симметричным остановом слябов представляет собой специалнзированиое логическое устройство, которое путем анализа и обработки поступающей в него информации осуществляет формирование и выдачу командных сигналов для симметричi;oro останова слябов на соответствующей секН.1Н1 подающего рольганга, а также имеет выходы для управления работой секции загрузочного рольганга и аналогичных БСО, обслул ивающих смежные секции нодающего рольганга.
Срабатывание одного из позиционных датчиков наличия слябов, подключенных к данному блоку (например, фотодатчика 29, подключенного к БСО 2 в результате затенения его слябом, нодавае.мым со стороны загрузочиого
рольганга 45), вызывает поступление импульсов от датчика 28 определения пути перемещения слябов через делитель частоты 60 и коммзтатор 61 в счетчик 5. Отсчет путевых задержек счетчико.м 65 перед выдачей командного сигнала на понижение скорости рольганга (нанример, рольганга 47) ведется с делением частоты следования импульсов датчика в несколько раз (например, с делением иа 8), что позволяет существенно уменьшить емкость счетчика. Это возможно ввиду того, что требования к точностн отсчета путевых задержек для командных сигналов иа понижение скорости рольгангов значительно , чем к точности симметричного останова слябов.
Полный переход сляба на секцию рольганга фиксируется отсчетом первой путевой задерлчки LI, которая равна разности между лгаксимальной длиной слябов и расстоянием от позиционного датчика наличия слябов до края смежного рольганга (например, от фотодатчика 29 до края подающего рольганга 46). Отсчет путевой задерл ки Lj вызывает срабатывание одного Из каналов дешифратора 66 по соответствующему состоянию счетчика 65 и фиксацию в формирователе 67 командного сигнала на понижение скорости смежной секции рольганга (например, секции 46).
Если сляб, транснортируемый со стороны загрузочного рольганга 45, предназначен для останова на одной из секций иодающего рольганга (например, на секции 47), то в коммутатор 68 блока 2 не подается сигнал запрета симметричиого останова сляба со стороны БСО 3. Благодаря отсутствию этого сигнала занрета, а также учитывая направление но.дачи слябов (но нолол ению ключа унравления 7), командный сигнал на ионнл ение скорости с. секцни рольганга, ностуиая в коммутатор 68, вызывает снятие сигиала запрета сим.метрнчного останова, ноступавшего ранее с коммутатора в блок /. В блоках / и 5, управляющих крайними секциями подающего рольганга 46 и 50, командный сигнал на нонижение скорости подается через коммутатор 68 соответственно в схемы 11 или 17 управления приводами для понил еиия скорости секций 45 или 51 загрузочных рольгангов ири поступлении с них слябов на смелшые секции подающего рольганга.
Прохолчдение командного сигнала на понижение скорости смежной секции загрузочного рольгалга через коммутаторы 68 блоков / и 5 происходит независимо от наличия сигналов запрета симметричного останова от блоков 2 и 4 соответственио, учитывается лишь направление подачн слябов (по полол{ерн1ю ключей унравления 6 или 10 на нульте оператора).
После полного перехода транспортируемого сляба на секцию нодающего рольганга производится отсчет второй путевой задержки L, равной сумме згдерл к L н пути, который нроходит сляб за время перехода смежной секции рольганга с транспортной скорости на пониженную. В результате отсчета путевой задержки Z.2 срабатывает соответствующий канал дешифратора 66, и в формирователе 67 фиксируется командный сигнал на останов )кной секции рольганга. Указанный командный сигнал через .коммутатор 68 в блоках / и 5 ноступает в схемы 11 или 17 управления приводами для останова секций 45 и 51 загрузочных рольгангов цосле поступления слябов на смежные с ними секции подающего рольганга. Прохождеиие командного сигнала на останов сложной секции загрузочного рольганга через коммутаторы 68 блоков / и 5 также не зависит от наличия сигналов запрета симметричного останова, учитывается лишь направление подачи слябов.
Командный сигнал на нонижение скорости транспортируемого сляба перед остановом на секции подающего рольганга отрабатывается, например, блоком 2 после отсчета счетчиком 65 числа импульсов, соответствующего путевой задержке La, которая равна расстоянию между двумя позиционными датчиками наличия слябов (например, между фотодатчиками 2Р и 50), уменьшенному на путь торможения сляба при переходе с транспортной скорости на пониженную. Срабатывание соответствующего канала дешифратора 66 в результате отсчета счетчиком 55 задержки L вызывает фиксацию в формирователе 67 командного сигнала на понижение скорости секции подающего рольганга (например, секции 47) и прохождение указанного командного сигнала через коммутатор 68 в схему управления приводом подающего рольганга (например, в схему 13 управления приводом).
С коммутатора 68 в схему 13 управления приводом поступают поочередно два вида командного сигнала на понил ение скорости подающего рольганга в соответствии с двумя возможными направлениями перемещения слябов по рольгангу. При коммутации указанного командного сигнала требуемое направление перемещения сляба определяется блоком логики 62 по состоянию позиционных датчиков наличия слябов (например, фотодатчиков 29 и 30.
Фиксация командного сигнала на понижение скорости секции подающего рольганга вызывает поступление соответствующей информации из формирователя 67 в блок логики 62 и через него в коммутатор 61, в результате чего производится сброс показаний счетчика 55 и запрет дальнейшего счета нмпульсов датчика 28 определения пути перемещения слябов.
При наличии сигнала запрета симметричного останова, поступающего со смежного блока, например БСО 5, при подаче сляба с загрузочного рольганга 45, в коммутаторе 68 рассматриваемого БСО, например блока 2, накладывается запрет на выделение командного сигнала на понижение скорости секции подающего рольганга (например, секции 47, в результате чего сляб транспортируется по данной секции подающего рольганга без понижения скорости.
Если в рассматриваемый БСО (например, в блок 2) не поступает сигнал запрета симметричного останова, то с момента засветки фотодатчика 29 до затенения фотодатчика 30 проходящим перед печью слябом и при наличии командного сигнала на понижение скорости секции 47 подающего рольганга блок логики
62отрабатывает сигнал, поступающий в коммутатор 61 и разрешающий отсчет счетчиком
63импульсов датчика 28 с делением на две частоты их следования. Таким образом производится измерение и запоминание в счетчике 63 разности расстояния между парой подключенных к данному блоку фотодатчиков 29, 30 и длиной проходящего между фотодатчиками сляба.
В результате затемнения фотодатчика (в рассматриваемом случае фотодатчика 30)
транспортируемым па поннжеиной скорости слябом формирователь 67 производит отработку управляющего сигнала останова привода рольганга перед его реверсированием. Разрешение на формирование указанного сигнала
поступает с блока логики 62, анализирующего состояние фотодатчиков, наличие разрешения на симметричный останов сляба и командного снгпала па понижеиие скорости секции подающего рольганга 47. Командный сигнал па
останов подается в схему 13 управления приводом кратковременно (например, в теченне 0,5 сек, после чего автоматически снимается. Время выдачи указанного кома.ндного сигнала выбирается достаточным для полного останова
секции подающего рольганга. Во время .выдачи командного сигнала прекращается прохождение через коммутатор 68 командного сигнала па понижение скорости секции 47 подающего рольганга в паправлепии лодачи сляба с загрузочного рольганга. После снятия командного сигнала на останов привода секции 47 через коммутатор 68 в схему 13 управления приводом поступает .командный сигнал на включение пониженной скорости секции 47 рольганга с противоположным направлением
Перемещения сляВа. Пеобходимое .направление перемещения сляба, как и при первичной выдаче командного сигнала на понижение скорости секци.и подающего .рольганга 47, определяется блоком логики 62 по состоянию
позиционных датчиков наличия слябов (например, фотодатчико.в 28 и 29).
Во время движения сляба после реверсирования рольганга непосредственпо при срабатывании позиционного датчика (например,
фотодатчика 30) от торца перемещающегося сляба блок логики 62 дает разрешение на прохождение через коммутатор 61 импульсов датчика 28 в счетчик 65 па основной частоте их следования. При этом в
блоке логики 62 учитывается происшедшее ранее формирование и выдача управляющего сигнала для кратковременного останова привода секции рольганга перед его реверсированием. Совпадение состояний обоих счетчиков фикспруется схемой сравнения 64, которая выдает импульс в формирователь 67. Формирователь 67отрабатывает командный ситиал на останов секции рольганга, который через коммутатор 68поступает в схему 13 управления приводом. Выдача указанного командного сигнала ири симметричном останове слябов производится с опережением, учитываюдхи, величину пути торможения сляба с пониженной скорости до полного останова. Опережение вводится установкой счетчиков 63 н 65 в различные исходные состояния и подбирается для каждой секции подающего рольганга в цроцессе наладки. После вьшолиения симметричиого останова слябов БСО нереводятся в исходное состояние нри установке соответствующих ключей управления на пульте оператора в положение «Стоп перед набором новой программы останова слябов. При перегоне слябов через отдельные секции подающего рольган га БСО, управляющие работой этих секций, автоматически переводятся в исходное состояние по сигналам БСО, управляющих смежными секциями рольганга по направлению транспортировки слябов. Папример, при перетоне сляба через секцию нодающего рольганга 47 в направлении секции 48, блок 3 отрабатывает командный сигнал на понижение скорости смежной секции рольганга. Этот сигнал поступает в блок логики 62 блока 2 и вызывает перевод БСО 2 в исходное состояние. Предмет изобретения -1. Устройство программного управления работой подающих и загрузочных рольгангов на участке загрузки нагревательных печей прокатного стана, включающее датчики положения, датчики пути перемещеиия слябов через логические блоки управления, подключенные к исполнительным приводам, отличающееся тем, что, с целью упрощения и централизации уиравления всеми рольгангами, оно снабжено блоком управления симметричным остановом слябов на каждой секции подагощего рольганга, а в состав логических блоков управления входят ключи управления секциями подающих рольгангов; выходы датчиков положения и иеремещения слябов и ключей управления секциями подающих рольгангов соединены со входами соответствующих блоков управления симметричным остановом слябов, а выходы этих блоков - с соответствующими приводами секций подающего рольганга, причем другие выходы блоков управления симметричным остановом слябов, соедине1Н1ые с приводом крайних секций подающего рольганга, подключены также к приводам секций загрузочных рольгангов, а входы и выходы смежных блоков управления симметричным остановом слябов связаны между собой. 2.Устройство по п. 1, отличающееся тем, что, с целью упрощения его схемы и повышения надежности работы, каждый блок управления симметричным остановом слябов содержнт блок логики, коммутаторы, делитель частоты, схему сравнения, счетчики, дешифратор и формирователь командных сигналов, причем делитель частоты и блок логики подключены через первый коммутатор к счетчикам, последние связаны со схемой сравнения и дешифратором, а выходы схемы сравнения, дешифратора и блока логики соединены с формирователем командных сигналов, выход которого подключен к блоку логики и другому коммутатору, при этом один из входов второго коммутатора подключен к блоку логики. 3.Устройство по и. 1, отличающееся тем, что в качестве датчиков положения слябов использованы фотодатчики, установленные симметрнчио осям печей но краям их посадочных окон на расстоянии, превышающем макснлгальио возможную длину слябов.
5Г
Риг.2
-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления безупорным остановом перемещающейся заготовки | 1983 |
|
SU1084094A2 |
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1984 |
|
SU1219191A2 |
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Устройство управления безупорным остановом полосы металла | 1974 |
|
SU533411A1 |
| Трехфазная индукционная нагревательная установка непрерывного действия | 1986 |
|
SU1410285A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ | 1973 |
|
SU368611A1 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1980 |
|
SU900907A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИНТЕГРАЛЬНЫХ СХЕМ | 1971 |
|
SU419903A1 |
| Устройство автоматического управления электродвигателем перемещения загрузочной машины | 1980 |
|
SU926486A1 |