1
Изобретение относится к области машиностроения и предназначено для использования в манипуляторах, применяемых, например, для выполнения монтажно-сборочных, подъемно-транспортных и технологических операций.
Известны запястья манипулятора, включающие корпус с держателем и шарнир поворота корпуса.
Однако таким манипулятором невозможно осуществлять сверление отверстий, завертывание гаек в связи с тем, что держатель не имеет полного неограниченного вращения относительно его продольной оси. Кроме того наличие утечек рабочей жидкости в гидроцилиндрах предплечья, которые связаны с корпусом запястья, может вызвать самопроизвольный поворот держателя oтнoJ:итeльнo его продольной оси, что снижает надежность работы запястья.
Цель изобретения - обеспечить неограниченное реверсивное вра.щение держателя и увеличить надежность запястья.
Это достигается тем, что держатель снабжен приводом вращения и выполнен в виде самотормозящего червячного колеса этого привода, заключенного совместно с шарниром в корпус, выполненный разъемным.
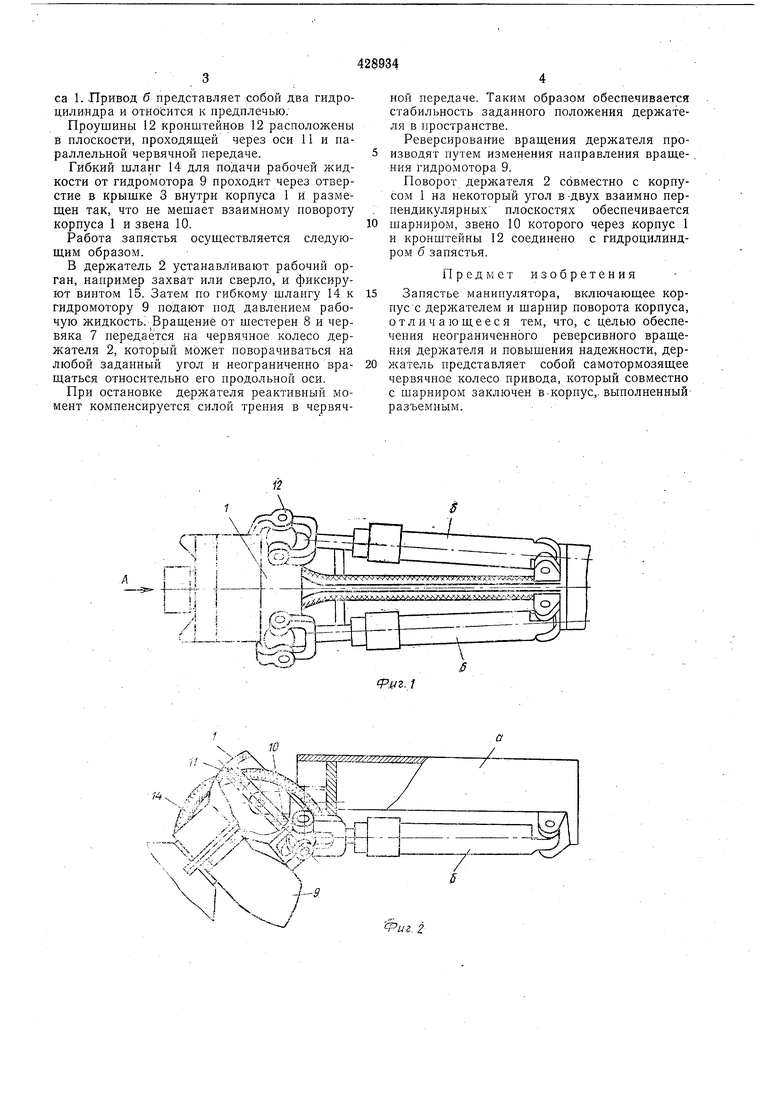
На фиг. 1 изображен общий вид запястья манипулятора, вид сверху; на фиг. 2 - то же.
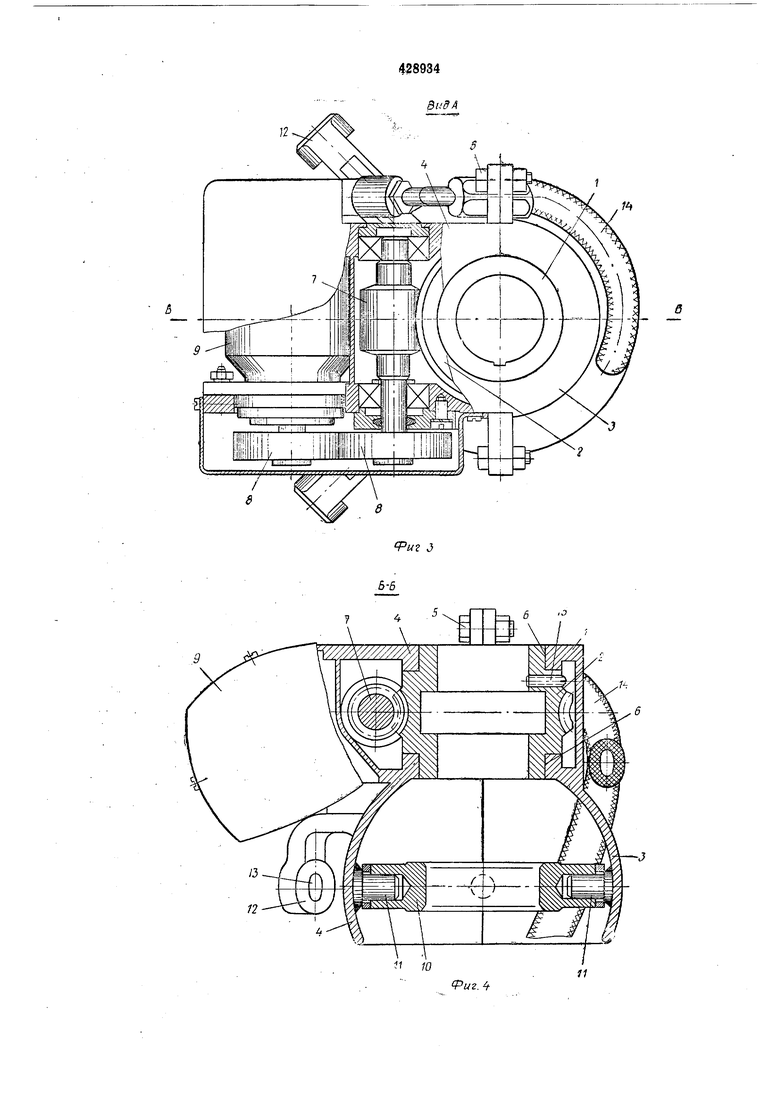
вид спереди; на фиг. 3 - то же, вид по стрелке А; на фиг. 4 - то же, разрез по Б-Б на фиг. 3.
Запястье манипулятора включает корпус 1, в котором размещен держатель 2 с приводом его вращения и шарнир поворота корпуса 1.
Корпус 1 выполнен разъемным из двух половип - крышки 3 и основания 4, жестко соединяемых между собой, например, с помощью болтов и гаек 5.
Держатель 2 выполнен в виде самотормозящего червячного колеса с цилиндрической ступицей, опирающейся на проточку корпуса 1. При этом образующийся подшипник скольжения 6 позволяет держателю 2 свободно вращаться в корпусе 1.
Червячное колесо держателя 2 через червяк 7 и шестерни 8 соединено, например, с гидромотором 9.
Шарнир поворота корпуса 1 включает звено -10 в виде крестовины кардана с осями 11, закрепленными на внутренней стороне корпуса 1, причем одна из этих осей соединена с крышкой 3, а другая - с основанием 4. Две другие оси закреплены непосредственно па звене 10 и предназначены для присоединения к звену а предплечья (см. фиг. 2).
С наружной стороны основания 4 установлены кронштейны 12 для соединения корпуса 1. Привод б представляет собой два гидроцилиндра и относится к предплечью.
Проушины 12 кронштейнов 12 расположены в плоскости, проходящей через оси 11 и параллельной червячной передаче.
Гибкий шланг 14 для подачи рабочей жидкости от гидромотора 9 проходит через отверстие в крышке 3 внутри корпуса 1 и размещен так, что не мешает взаимному повороту корпуса 1 и звена 10.
Работа запястья осуществляется следующим образом.
В держатель 2 устанавливают рабочий орган, например захват или сверло, и фиксируют винтом 15. Затем по гибкому шлангу 14 к гидромотору 9 подают под давлением рабочую жидкость Вращение от шестерен 8 и червяка 7 передаётся на червячное колесо держателя 2, который может поворачиваться на любой заданный угол и неограниченно вращаться относительно его продольной оси.
При остановке держателя реактивный момент компенсируется силой трения в червячной передаче. Таким образом обеспечивается стабильность заданного положения держателя в пространстве.
Реверсирование вращения держателя производят путем изменения направления вращения гидромотора 9.
Поворот держателя 2 совместно с корпусом 1 на некоторый угол в -двух взаимно перпендикулярных плоскостях обеспечивается шарниром, звено 10 которого через корпус 1 и кронштейны 12 соединено с гидроцилиндром б запястья.
Предмет изобретения
Запястье манипулятора, включающее корпус с держателем и шарнир поворота корпуса, отличающееся тем, что, с целью обеспечения неограниченного реверсивного вращения держателя и повышения надежности, держатель представляет собой самотормозящее червячное колесо привода, который совместно с шарниром заключен в-корпус,, выполненныйразъемным.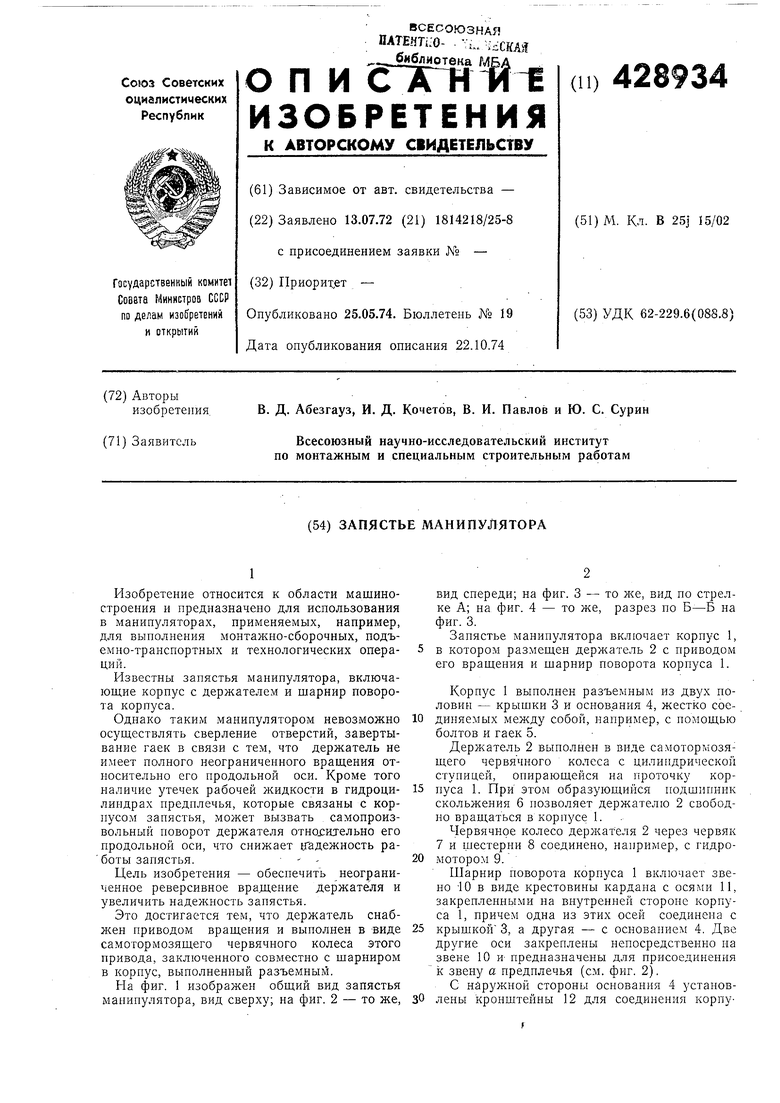
| название | год | авторы | номер документа |
|---|---|---|---|
| Запястье манипулятора | 1978 |
|
SU835735A1 |
| Запястье манипулятора | 1977 |
|
SU670431A2 |
| МЕХАНИЗМ ДЛЯ ПОВОРОТА ЛОПАТОК РАБОЧЕГО КОЛЕСА ОСЕВОГО ВЕНТИЛЯТОРА | 1973 |
|
SU380868A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| ВИНТОВОЙ ДОМКРАТ^СЕССгОЗНАН Iшшт-гвш'шщ_^__[^';^;HOTCKA_J | 1972 |
|
SU327128A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ ДЕТАЛЕЙ | 1969 |
|
SU251119A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| МЕХАНИЗМ УБОРКИ-ВЫПУСКА ШАССИ САМОЛЕТА | 2015 |
|
RU2609573C1 |
Ю
- . I :V 1
JK- - W -х iи .
Ч -Ь
74, ,ЛvC J
Ч ..VС
т-..,/:Г- :-1Д
а
/
/
Фиг. 2
В
