(54) ЗАПЯСТЬЕ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАПЯСТЬЕ МАНИПУЛЯТОРА | 1972 |
|
SU428934A1 |
| Запястье манипулятора | 1977 |
|
SU670431A2 |
| Запястье манипулятора | 1972 |
|
SU512048A1 |
| ЗАКРЫВАЮЩЕЕ УСТРОЙСТВО | 2023 |
|
RU2809294C1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1302000A1 |
| Захват промышленного робота | 1985 |
|
SU1310202A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| Захват для столбов | 1980 |
|
SU965947A1 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| Баровая машина | 1983 |
|
SU1177417A1 |
Изобретение отнооится к маш-иностроению, в частности к. манипуляторам, предназначенным для выполнения монтажносборочных, подъемно-транспортных.и других работ.
Известно запястье манипулятора, содержащее разъемный корпус с держателем в виде самотормозяп его червячного КОлеса, в отверстии которого расположен вал, соединенный 1C приводом зах(вата через карданный шарнир Ij.
Иедостатками известного устройства являются ненадежность работы и сложность конструкции.
Цель изобретения - повышение надежности и упрош,ение конструкции устройства.
Это достигается тем, что привод захвата расположен соосно червячному колесу и жестко закреплен на разъемном корпусе.
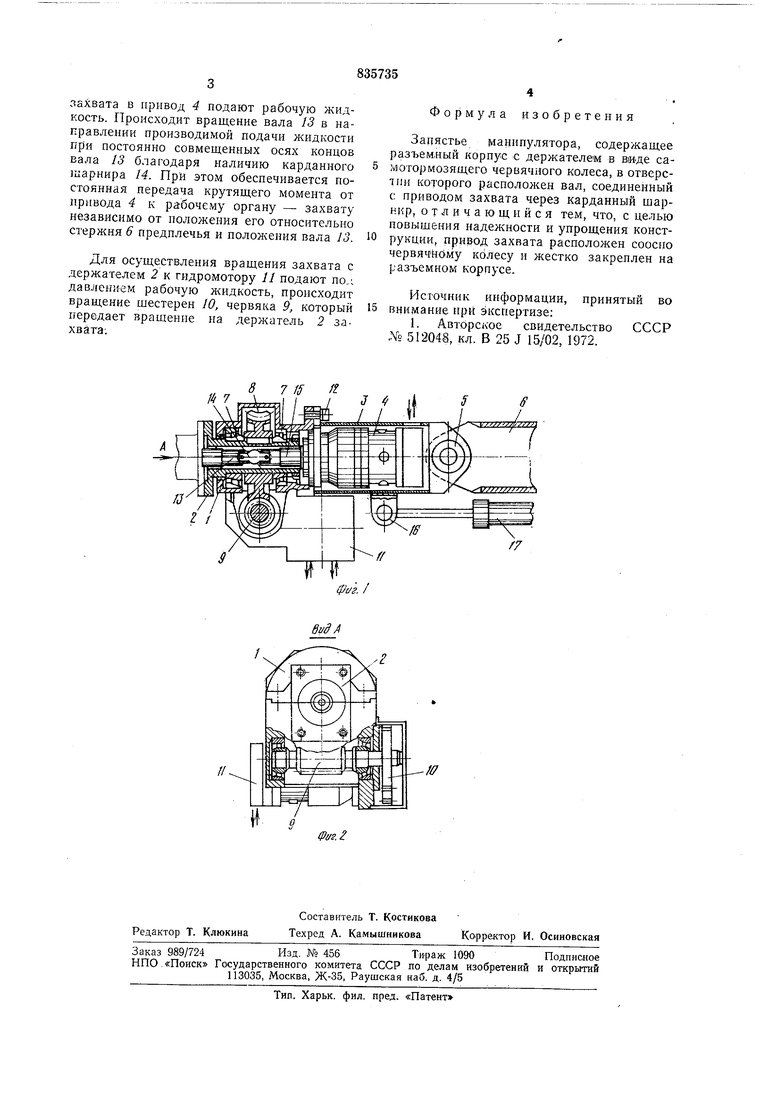
На фиг. 1 изображено запястье манипулятора, общий вид в разрезе; на фиг. 2 - вид по стрелке Л фиг. 1.
Запястье манипулятора включает разъемный корпус /, в котором размешен держатель 2 с приводом его вращения, съемный кронштейн 3, в котором размещен привод 4 перемещения звеньев захвата, и шарнир 5 поворота корпуса запястья, смонтированный на кронштейне 3 и сочленяющий запястье со стержнем 6 предплечья.
Держатель 2 выполнен в виде самотормозящего червячного колеса и установлен в подшипниках 7. Червячное колесо 5 держателя 2 через червяк 9 и шестерни 10 соединено с Приводом .//, например гидромотором. Кронштейн 3 жестко присоединен к корпусу Л например, болтами /2. Размещенный в нем привод 4 перемешения звеньев захвата жестко присоединен к корпусу /, установлен соосно держателю 2 н соединен с валом 13 привода захвата через карданный шарнир 14, установленный в отверстии чревячного колеса. Соединение карданного шарнира 14 с приводом 4 осуществлено с помощью сцепной муфты 15, обеспечивающей -возможность разъединения и соединения карданного шарнира 14 с приводом 4. С наружной стороны кронштейна J установлены кронштейны 16 для соединения запястья с приводом 17 предплечья, с помошью которого происходит поворот запястья относительно стержня 6 предплечья.
Устройство работает следующим образом.
В держатель 2 устанавливают рабочий орган, например захват (на чертеже не по30казан). Для осуществления работы звеньев
захвата в привод 4 подают рабочую жидкость. Происходит вращение вала 13 в направлепии производимой подачи жидкости при постоянио совмещенных осях концов вала 13 благодаря наличию карданного шарнира 14. При этом обеспечивается постоянная передача крутящего момента от привода 4 к рабочему органу - захвату независимо от положения его относительно стержня 6 предплечья и положения вала 13.
Для осуществления вращения захвата с держателем 2 к гидромотору 11 подают пол давлением рабочую жидкость, происходит вращение шестерен 10, червяка 9, который передает вращение на держатель 2 захвата.
фуг. г
Формула изобретения
Запястье манипулятора, содержащее разъемяый корпус с держателем в виде самотормозящего червячного колеса, в отверстии которого расположен вал, соединенный с приводом захвата через карданный шарнкр, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, привод захвата расположен соосио червячйбму колесу и жестко закреплен на разъемном корпусе.
Источник информации, принятый во 15 внимание при экспертизе:
ff
