1
Изобретение относится к области грузовых операций, в частности, к системам определения взаимного положения судов при грузопередаче на ходу траверзным способом.
Известна система определения взаимного положения судов при грузопередаче траверзным способом по тросу, натягиваемому с помощью лебедки, содержащая два полукомплекта, первый-на разгружаемом, а второй- на принимающем груз судне, причем в состав первого полукомплекта входят датчик длины натянутого между судами троса, выполненный в виде кинематически связанных с лебедкой редуктора и линейного вращающегося трансформатора (ЛВТ), датчик взаимного продольного перемещения судов в горизонтальной плоскости, выполненный в виде кинематически связанного с тросом и электрически- с указанным ЛВТ синусно-косинусиого вращающегося трансформатора (СКВТ), и источник питания, а в состав каждого полукомплекта входит индикаторный блок, содержащий светозвуковой сигнализатор опасных режимов и для первого полукомплекта - индикатор расстояния между судами.
Основным недостатком известной системы является низкая надежность и точность измерения расстояния между судами, вследствие
чего невозможно четко определять границы безопасной работы траверзной передачи грузов.
Цель изобретения - повышение надежности и точности измерений.
Для этого трос выполнен в виде многожильного кабеля, электрически связывающего оба полукомплекта, каждый полукомплект снабл ен датчиком бортовой качки, а первый полукомплект- двумя суммирующими трансформаторами и датчиком отклонения троса в вертикальной плоскости, выполненным в виде кинематически связанного с тросом СКВТ, причем СКВТ датчика взаимного продольного перемещения судов в горизонтальной плоскости электрически связан с первым суммирующим трансформатором и с СКВТ датчика отклонения троса в вертикальной плоскости, а последний СКВТ - со вторым суммирующим трансформатором.
Для учета влияния бортовой качки каждый датчик бортовой качки снабжен маятниковым чувствительным элементом и кинематически связанным с ннм посредством ротора СКВТ, статор которого электрически связан с обоими суммирующими трансформаторами.
С целью обеспечения стабильного питания обоих полукомплектов источник питания электрически связан с ЛВТ, с СКВТ датчиков бортовой качки и через индикаторный блок первого полукомплекта - с индикаторным блоком второго.
С целью унификации оборудования и повышения надежности информирования о работе системы индикаторные блоки обоих полукомплектов выполнены аналогичными и снабжены каждый переговорным устройством и индикатором взаимного продольного перемещения судов, а индикаторный блок второго полукомплекта - индикатором расстояния между судами, причем в каждом индикаторном блоке индикатор взаимного продольного перемещения судов электрически связан через сигнализатор опасных режимов с индикатором расстояния между судами.
Для обеспечения контроля за траверзным расстоянием между судами и взаимным продольным перемещением судов при грузопередаче первый суммирующий трансформатор электрически связан с каждым индикатором взаимного продольного перемещения судов, а второй суммирующий трансформатор электрически связан с каждым индикатором расстояния между судами.
Для обеспечения возможности наблюдения тенденции изменения измеряемых .параметров в индикаторных блоках обоих полукомплектов индикаторы выполнены в виде стрелочных приборов.
С целью получения всесторонней информации об измерениях и предотвращения аварийных ситуаций оба индикаторных блока снабжены световыми сигнальными транспарантами, а каждый сигнализатор опасных режимов снабжен задатчиком опасных режимов, выполненным в виде контактных групп с неподвижными контактами на границах безопасного диапазона шкалы измерения и скользящими контактами, причем световая часть каждого сигнализатора опасных режимов снабжена реле, электрически связанными с задатчиком опасных режимов и с сигнальными лампочками. С целью обеспечения связи между судами без ограничений переговорные устройства обоих индикаторных блоков связаны электрически посредством кабеля.
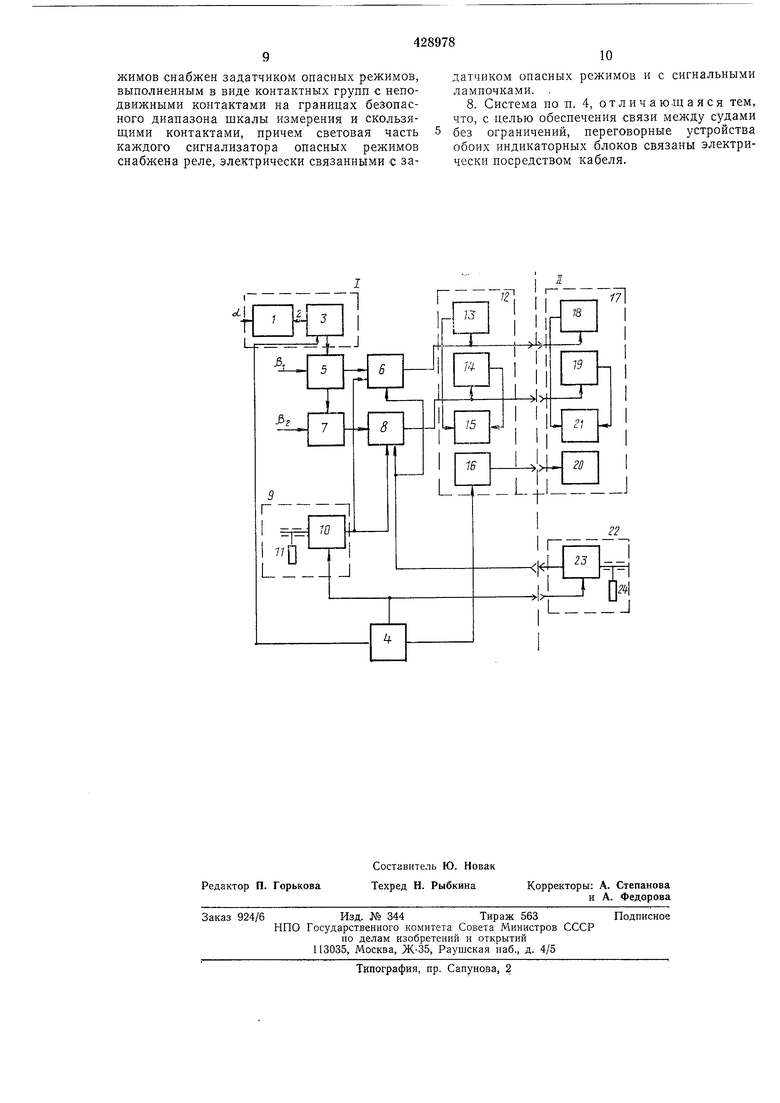
На чертеже изображена блок-схема предлагаемой системы.
Предлагаемая система базируется на отдельной маломощной, имеющей мягкую характеристику лебедке, работающей после закрепления троса на принимающем судне в режиме выбирания (торможения). При этом трос выполнен в виде многожильного кабеля.
Система выполнена из двух полукомплектов, имеющих между собой кабельную электрическую связь: 1-полукомплект на передающем судне и И - полукомплект на принимающем судне.
Полукомплект 1 состоит из следующих элементов. Датчик длины троса содержит редуктор 1, посредством которого вал кабельной лебедки (на чертеже не показана) механически
соединен с ротором 2 ЛВТ 3. На первичную обмотку ЛВТ 3 подается от источника 4 питания стабилизированное напряжение t/ 60 В с ГЦ, а его вторичная обмотка соединена с первичной обмоткой СКВТ 5 - датчика взаимного продольного перемещения судов в горизонтальной плоскости. Вторичная синусная обмотка СКВТ 5 соединена с первичной обмоткой суммирующего трансформатора 6,
косинусная - с первичной обмоткой СКВТ 7- датчика отклонения троса в вертикальной плоскости. Вторичная косинусная обмотка СКВТ 7 соединена с одной из первичных обмоток суммирующего трансформатора 8.
Датчик 9 бортовой качки состоит из СКВТ 10 - преобразователя угла бортовой качки в электрический сигнал, маятникового чувствительного элемента 11, механически соединенного с ротором СКВТ 10, на первичную обмотку которого подается стабилизированное напряжение (7 0-60 в с Гц от источника 4 питания, а вторичная обмотка его соединена с одной из первичных обмоток суммирующих трансформаторов 6 и 8.
Индикаторный блок 12 установлен на ходовом мостике судна, состоящем из двух стрелочных приборов: индикатора 13 взаимного продольного перемещения судов, электрически соединенного со вторичной обмоткой суммирующего трансформатора 6; индикатора 14 расстояния между судами по перпендикуляру к диаметральной плоскости передающего судна, электрически соединенного со вторичной обмоткой суммирующего трансформатора 8.
Полукомплект 1 содержит также сигнализатор 15 опасных режимов работы грузопередачи (опасное опережение или отставание, опасное сближение или расхождение).
Сигнализатор 15 состоит из четырех электрических реле, которые обеспечивают включение сигнальных лампочек соответствующих световых сигнальных транспарантов. Реле электрически соединены с задатчиками опасных режимов работы, которые встроены в индикаторы 13 и 14 и представляют собой контактные группы: с неподвижным контактом на граничных участках безопасного диапазона работы щкалы измерения и со скользящим контактом, закрепленным на стрелке индикаторов.
Полукомплект 1 имеет также проводное переговорное устройство 16 и источник 4 питания, подающий стабилизированное питание В с Гц па первичную обмотку ЛВТ 3 В с Гц и на силовую обмотку СКВТ 10, В постоянного тока на проводное переговорное устройство 16.
Полукомплект II системы на принимающем судне содержит следующие узлы.
Индикаторный блок 17 установлен на ходовом мостике принимающего судна и .по конструкции аналогичен индикаторному блоку на передающем судне. Индикаторы 18 и 19 этого блока электрически соединены посредством
кабеля со вторичными обмотками суммирующих трансформаторов 6 и 8.
Проводное переговорное устройство 20 соединено электрически посредством кабеля с аналогичным устройством 16 на передающем судне. Кроме того, индикаторный блок содержит сигнализатор 21 опасных режимов.
Датчик 22 бортовой качки имеет конструкцию, аналогичную конструкции датчика 9 бортовой качки на передающем судне. Первичная и вторичная обмотки СКВТ 23 соединены посредством кабеля соответственно с источником 4 питания и первичными обмотками суммирующих трансформаторов 8 и 6, находящихся на передающем судне. Датчик содержит маятниковый чувствительный элемент 24, аналогичный маятниковому чувствительному элементу 11.
Описанная система работает следующим образом.
Сигнал угла а поворота барабана лебедки измерительного кабеля подается через редуктор 1 с передаточным числом 1/400 на ЛВТ 3.
Напряжение f/i, снимаемое со вторичной обмотки ЛВТ 3, пропорционально углу а поворота барабана лебедки измерительного кабеля или, что то же самое, длине измерительного кабеля
Напряжение U подается с ЛВТ 3 на обмотку возбуждения (первичную) СКВТ 5 - датчика взаимного продольного смещения судов Б горизонтальной плоскости.
СКВТ 5 смонтирован у направляющей троса - кабеля, которая имеет возможность свободно разворачиваться как в горизонтальной, так и в вертикальной плоскостях, т. е. имеет возможность задавать углы отклонения кабеля от траверзы (иерпендикуляра к диаметралыюй плоскости передающего судна) как в горизонтальной (|3i), так и в вертикальной (|32) плоскостях. Сигнал угла Pi подается на ротор СКВТ о, со вторичных обмоток которого снимается напряжение:
с синусной A i-sinS,; с косинусной A icospi,
где Л -коэффициент трансформации.
Отсюда следует, что напряжение Vz пропорционально величине взаимного продольного перемещения судов, а f/з пропорционально расстоянию между судами по перпендикуляру к диаметральной плоскости передающего судна без учета угла р2 отклонения кабеля от траверзы в вертикальной плоскости.
Напряжение U подается на одну из первичных обмоток суммирующего трансформатора 6. Напряжение t/з подается на первичную обмотку последующего СКВТ 7 - датчика угла отклонения троса в вертикальной плоскости.
СКВТ 7 смонтирован аналогично СКВТ 5 у направляющей кабеля. На его ротор подается сигнал угла РаНапряжение, снимаемое со вторичной косинусной обмотки СКВТ 7, равно:
У,:г/ГУз-С08 „
Т. е. это напряжение пропорционально расстоянию между судами по перпендикуляру к диаметральной плоскости передающего судна с учетом угла рг.
Напряжение i/4 подается на одну из первичных обмоток суммирующего трансформатора 8.
Напряжения U и U представляют информацию о взаимном положении судов, но имеют в себе информацию о взаимной бортовой качке.
Для устранения влияния бортовой качки передающего и принимающего судов на результаты измерения предусмотрены датчики 9 и 22 качки на этих судах и суммирующие трансформаторы 6 и 8.
Маятниковые чувствительные элементы И и 24 на передающем и на принимающем судах л :естко связаны с роторами СКВТ, соответственно 10 и 23 и благодаря своему свойству - инерционности, стремятся при качке сохранить положение вертикали. Статор СКВТ, жестко связанный с судном, следит за бортовой качкой, т. е. возникает угол рассогласования ротора и статора СКВТ, равный углу качки.
Обмотки возбуждения СКВТ 10 и 23 на передающем и на принимающем судах запитаны стабилизированным напряжением от источника 4 питания /5, f/e с Гц.
Напряжения, снимаемые со вторичных (синусных) обмоток этих СКВТ, соответственно равны:
U,.KU,-smi,,
гУ -/Cf/e-Sin-fa
где К. - коэффициент трансформации;
Л|1 - угол бортовой качки передающего
судна; 72 - угол бортовой качки принимающего
судна.
Напряжения f/2, Uj, U подаются раздельно на первичные обмотки суммирующего трансформатора 6, напряжения U, С/у, s подаются аналогичным образом на первичные обмотки суммирующего трансформатора 8.
Напряжения на выходе суммирующих трансформаторов 8 и 6 определяются соответственно
и п,и -Ь nJJ + nJJ, U,n - n,/7j 4- , + ,,
где п; - коэффициент трансформации по соответствующему входу.
Напряжение С/д определяет информацию о расстоянии между судами по перпендикуляру к диаметральной плоскости передающего судна с етом всех выщеперечисленных поправок.
Напряжение С/ю определяет информацию о взаимном продольном перемещении судов при грузопередаче. Эти напряжения подаются на стрелочные индикаторы на передающем судне, а через кабель - на принимающее судно. Сигнализация опасных режимов работы - опасное расхождение, опасное сближение, опасное опережение, опасное отставание-осуществляется следующим образом. На стрелочных индикаторах 14 и 19 и 13, 18 расстояния между судами по перпендикуляру к диаметральной плоскости передающего судна и взаимного продольного перемещения соответственно имеются зоны шкалы, соответствующие расстояниям опасного сближения и расхождения, опасного опережения и отставания, отмеченные красной краской, а между этими зонами рабочий диапазон отмечен черной краской. Так как сигнализация подобным образом вынесена непосредственно на индикаторы, то упрощается работа командиров судов или рулевых по Зправлению судами при грузопередаче. Помимо этой сигнализации предусмотрена сигнализация световая и звуковая, которая срабатывает следующим образом. По достиженин стрелками индикаторов начальных участков опасных зон шкал замыкается контакт, скрепленный со стрелкой, и контакт на границе участков опасных зон, включаются соответствующие реле сигнализаторов 15 и 21 и замыкаются цепи осветительных лампочек световых сигнальных транспарантов с соответствующими надписями, находящихся на индикаторном блоке, а также включается звуковая сигнализация. Двусторонняя командная связь между судами при грузопередаче осуществляется посредством проводных переговорных устройств 16 и 20 чесез кабель. Формула изобретения 1. Система определения взаимного положения судов при грузопередаче траверзным способом по тросу, натягиваемому с помощью лебедки, содержащая два полукомплекта, первый- на разгружаемом, а второй -на принимак5Шем груз судне, причем в состав первого полукомплекта входят датчик длины натянутого между судами троса, выполненный в виде кинематически связанных с лебедкой редуктора и линейного вращающегося трансформатора (ЛВТ), датчик взаимного продольного перемещения судов в горизонтальной плоскости, выполненный в виде кинематически связанного с тросом и электрически - с указанным ЛВТ синусно-косинусного вращающегося трансформатора (СКВТ), и источник питания, а в состав каждого полукомплекта входит индикаторный блок, содержащий светозвз ковой сигнализатор опасных режимов и для первого полукомплекта - индикатор расстояния между судами, отличающаяся тем, что, с целью повышения надежности и точности измерений, трос выполнен в виде многожильного кабеля, электрически связывающего оба полукомплекта, каждый полукомплект снабжен датчиком бортовой качки, а первый полукомплект- двумя суммирующими трансформаторами и датчиком отклонения троса в вертикальной плоскости, выполненным в виде кинематически связанного с тросом СКВТ, причем СКВТ датчика взаимного продольного перемещения судов в горизонтальной плоскости электрически связана с первым суммирующим трансформатором и с СКВТ датчика отклонения троса в вертикальной плоскости, а последний СКВТ - со вторым суммирующим трансформатором. 2.Система по п. 1, отличающаяся тем, что, с целью учета влияния бортовой качки, каждый датчик бортовой качки снабжен маятниковым чувствительным элементом и кинематически связанным с ним посредством ротора СКВТ, статор которого электрически связан с обоими суммирующими трансформаторами. 3.Система по п. I, отличающаяся тем, что, с целью обеспечения стабильного питания обоих полукомплектов, источник питания электрически связан с ЛВТ, с СКВТ датчиков бортовой качки и через индикаторный блок первого полукомплекта - с индикаторным блоком второго. 4.Система по п. I, отличающаяся тем, что, с целью унификации оборудования и повыщения надежности информирования о работе системы, индикаторные блоки обоих полукомплектов выполнены аналогичными и снабжены каждый переговорным устройством и индикатором взаимного продольного перемещения судов, а индикаторный блок второго полукомплекта - индикатором расстояния между судами, причем в каждом индикаторном блоке индикатор взаимного продольного перемещения судов электрически связан через сигнализатор опасных режимов с индикатором расстояния между судами. 5.Система по п. 4, отличающаяся тем, что, с целью обеспечения контроля за траверзным расстоянием между судами и взаимным продольным перемещением судов при грузопередаче, первый суммирующий трансформатор электрически связан с каждым индикатором взаимного продольного перемещения судов, а второй суммирующий трансформатор электрически связан с каждым индикатором расстояния между судами. 6.Система по п. 4, отличающаяся тем, что, с целью обеспечения возможности наблюдения тенденции изменения измеряемых параметров, в индикаторных блоках обоих полукомплектов индикаторы выполнены в виде стрелочных приборов. 7.Система по п. 4, отличающаяся тем, что, с целью получения всесторонней информации об измерениях и предотвращения аварийных ситуаций, оба индикаторных блока снабжены световыми сигнальными транспарантами, а каждый сигнализатор опасных режимов снабжен задатчиком опасных режимов, выполненным в виде контактных групп -с неподвижными контактами на границах безопасного диапазона шкалы измерения и скользящими контактами, причем световая часть каждого сигнализатора опасных режимов снабжена реле, электрически связанными с заи с сигнальными
датчиком опасных режимов лампочками. .
8. Система поп. 4, отличающаяся тем, что, с пелью обеспечения связи между судами без ограничений, переговорные устройства обоих индикаторных блоков связаны электрически посредством кабеля.