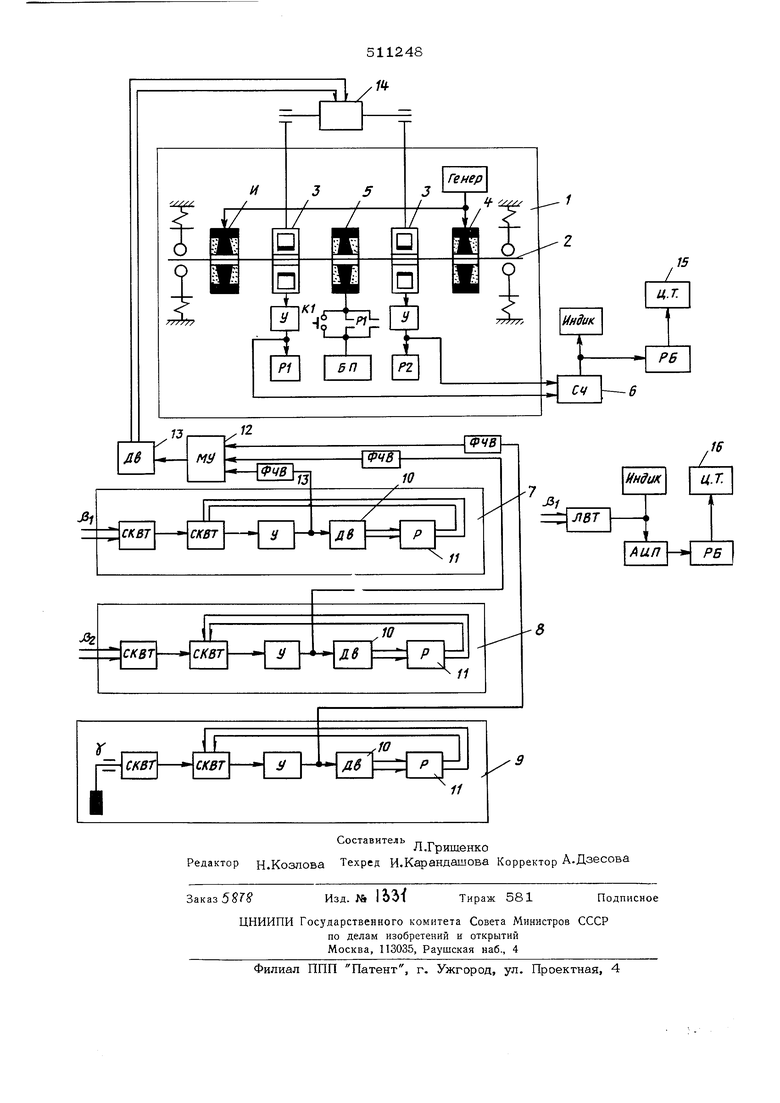
двигателем обработки, электрически соед ненным с выходом суммирующего магнит. :ного усилителя, три входа которого алектр :Чески соединены с выходами трех фазочувот витальных i выпрямителей, соединенных Электрически своими входа -га с выходами ус№ лйтелей датчиков угла отклонения тросика d трйверза передающего судна в вертикальной, горизонтальной плоскостях и угла крена, при этом выходы считывающих головок че™ рез свои усилители электрически соединены с двумя входами реверсивного электриче ского счетчика, электрически соединенного выходом одновременно с цифровым индика тором расстояния и релейным блоком, электрически соединенным выходом с цифро вым табло. Кроме тЬго, для обеспечения измерения взаимного продольного смещения судов при передаче грузов : в ней применено измерител нов устройство, выполненное из линейного вращающегося трансформатора, ротор которо го механически соединен с задатчиком отклонения ; измерительного тросика от траверза передающего судна в горизонталь ной плоскости, выходная обмотка которог 6 .елактрически соединена со стрелочным ин дикатором и со входом аналогодифрового. преобразователя, выход которого алектриче ски соединен с релейным блоком, электри чески соединенным с цифровым табло. Для повыщения точности измеренияуглов ойсЛонения измерительного тросика в -горизонтальной и вертикальной плоскостях от траверза передающего судна, а также угла крена, датчики этих углов выполнены в виде идентичных следящих систем, при этом их входным электрическим элементом является с инусно-косинусный вращающийся трансформатор (СКВТ), механически соединенный Гсвоим входом у. датчиков отклонения измер тельного тросика с задатчиками этих углов .а у датчика крена - с маятниковым чувст вительным элементом, своим выходом СКВТ электрически соединен трансформатор ной синхронной передачей с последующим СКВТ, который в свою очередь электриче ски соединен с выходок: усилителя, соедине ного своим выходом с двигателем,- который через редуктор механически, соединен с po тором второго СКВТ. Для повышения точнос и и надежности | . измерения реверсивный магнитный датчик длины измерительного стального тросика, выполнен в вкае намагничиваемой головки электрически соединенной параллельно через две пары нормально разомкнутых Контактов двух импульсных реле и нормаль. но разомкнутые контакты пусковой кнопки с блоком питания, при этом по обе сторот, этой головки расположено по одной считы вающей головке, выходы которых электрича Ски соединены через усилители с обмоткаг. ми импульсных реле, а по обе стороны датч ка расположено по одному нанравляющему ролику и по одной считывающей магнитной головке, электрически соединенных одновременно своими обмотками-fc выходом одного генератора. Для обеспечения йадежной переговорной связи между судами при передаче грузов к стальному тросику подвещен на карабинах телефонный кабель. На чертеже изображена блок-схема cifc. стемы взаимного положения судов при гру ,зопередачетраверзным способом. v Реверсивный магйитный датчик 1 измерил тельного тросика 2 со считывающей 3 и стирающей 4 голыжами, расположенными пО парно по обе стороны от намагничивающей головки 5, электрически связан с реверсив . ным счетчиком числа импульсов 6. Датчик 7 угла отклонения тросика 2от i траверза передающего судна в горизонталь« ной плоскости, датчик 8 угла отклонений тросика 2 от траверза передающего судна в вертикальной плоскости и датчик 9 угла крена электрически соединены с управляю i щей обмоткой реверсивного двигателя 10, i который механически связан с входным валиг ; ком редуктора 11 и суммирующим магнит ным усилителем 12, связанным с управляг ющей обмоткой двигателя 13. Вал двигателя 13 связан с входным валом червячного редуктора 14, выходные валики которого механически связаны с магнитными головками 3. Реверсивный счетчик 6 электрически связан с цифровым табло -15, а датчик 7 с цифровым табло 16,, Электрическое поле намагничивающей го ловки 5 намагничивает участок измеритель ного тросика 2. При движении тросика-; 2 вправо (увеличение его длины) срабатывает считывающая головка 3, расположенная справа от головки 5. В случае прохождения через нее участка тросика 2 с магнит ной меткой, с обмотки головки 3 импульс напряжения подается на суммирующий вход реверсивного счетчика 5 и на обмотку го;Гов;ки 5, Происходит намагнич;гаание следую щего участка тросика 2. На стираюиите головки 4 подается напрйженне, создающее размагничивающее иоле, стирающее Mai нитные метки. ; При движении тросика 2 влево (уменьше ние . его длины) срабатывает считываю щая головка 3, расположенная слева от намагничивающей головки 5. В случае прохождения через нее участка тросика 2 с магнитной меткой, с обмотки головки 3 импульс напряжения подается на вход ёы читания реверсивного счетчика 6. Зная ба.зовое расстояние между намагничивающей ,.TJi№Q.. и..счить1вающими 3, ответствует одному считывающему импульсу, с пойощью реверсивного счетчика 6 подсчитывается длина тросика. Расстояние между судами рассчитывается путем введе« jiiM (Показаний датчиков 7, 8 и 9 на управл ющую обмотку peBejpcHBHoro двигателя 10, который механически связан с входным ва ликом редуктора 11, и на суммирующий ; магнитный усилитеЛь 12j где эти сигналы I суммируются, усиливаются и результи рующе напряжение подается на двигатель 13, который через червячнь1Й редуктор 14 пе« ремещает одновременно, держатели двух считывающих головок 3 относительно на- магничивающей головки 5, меняя одновре менно базовое расстояние между ними, что приводит к изменению масщтаба измерения длины тросика 2. Формула изобретения , .. , , ,, 1. Система определения взаимного положе ния судов при грузопередаче на ходу тра вераным способом, содержащая датчик измерительного элемента, датчик угла отклонения измерительного элемента от траверза передающего судна в горизонталь ной плоскости, аналогоцифровой npeo6pai-i зователь, цифровой индикатор расстояния, /ёвётовое цифровое табло и блок питания,Йри этом датчик длины измерительного &ле мента своим выходом соединен электр чёски через соединительный ящик с входом датчика угла отклонения измерительного элемента от траверза передающего судна в горизонтальной плоскости, который своим выходом электрически соединен через соеди нительный ящик и аналогоциф 1овой преобра- зователь с цифровым и щикатором расстоя НИН и со световым цифровым табло, а блок питания элeктp tчecки соединен через соединительный яацик с аналогоцифровым преоб разователем, о т л и ч а ю щ а я с я тем что, с целью обеспечения дrvro IO.nocти, повышения точности измерения, повышения надежности и уст|1а 1емия влия.чия бортг вой качки на результат измерения расстояния между судами, измерительный елемент ; выполнен в виде подвещенного между судврми стального тросика, один конец которого ; намотан на барабан автоматической измери I тельной лебедки на передающем судне, а другой его конец закреплен на принимающем I судне, при этом на входе системы установ ,лен- реверсивный магнитный датчик дпины : стального тросика со считывающими голов- ками, держатели которых механически свя- . заны с выходными валиками червячного ре-# дуктора, механически соединенного с двига |телем отработки, который электрически сое динен с выходом -суммирующего магнитного усилителя, три входа которого влектри- чески соединены с выходами трех фазочувстУ вительных выпрямителей, соединенных элект. рически своими входами с выходами усилителей датчиков угла отклонения тросика от траверза передающего судна в вертикальной, горизонтальной плоскостях и угла крена, при этом выходы считывающих голо вок через свои усилители электрически соединены с двумя вхбдами реверсивного электр1гаеского счетчика, електр11чески соединенного выходом одновременно с ци4ро« вым индикатором расстояния и релейным бло ком, электрически соед 1ненного выходом с цифровым табло. 2.Система по п, 1, отличающаяся тем, что, с целью обеспечения измерения взаимного продольного смещения судов при передаче грузов, в ней применено измерительное устройство, .выполненное из линейного вращающегося трансформатора, ротор которого механически соединен с задатчиком угла отклонения измерительного тросика от траверза передающего судна в горизонтальной плоскости, выходная о&мотка которого электр1гчески соединена со стрелочным индикатором н со входом ана- логоцифрового преобразователя, выход которого электрически соединен с релейным блоком, электрически соединенным с цифровым табло. 3.Система по п. 1, о т л и ч а ю щ а я с я тем, что, с нетало повышения точности измерения углов отклонения измерительного тросика в гориао11та.-;ьиой н вертикальной плоскостях от трав1 ;зп передающего судна, а также утла Kprnici, дщ-чики этих углов выполнены в пиде наентичных след5Щ1их систем, при этом их Б.чпд1гы.м электрическим элементом является с:;1г;уснс - осинусный враж щающийся т|л1 1С1+о1м-п(-р (СКВТ), механи- чески соодиммип.гй cf- Гсм вхолом у датчи- ,51 ков отклонения измерительного тросика с аадатчиками этих углов, а у датчика крена с маятниковым, чфгвствительным элементом, своим выходом СКВТ электриче« ОКИ соединен трансформаторной синхронной передающей с последующим СКВТ, который в свою очередь электрически соединен с входом усилителя, соединенного своим выходом с двигателем, который через редуктор механически соединен с ротором второрого СКВТ. 4. Система по п. 1, отличаю- щ а я с я тем, что, с целью повыщения точности и надежности измерения, реверсивный магнитный датчик длины измерительного стального тросика выполнен в виде намагн чивающей головки, электрически соединен- 1248,. ной параллельно через дьо пары нормально разомкнутых контактов двух импульсных реяе и нормально разомкнутые контакты пусковой кнопки с блоком питания, при этом S по обе стороны этой головки расположены по одной считывающей головке, выходы которых электрически соединены через усили тели с обмотками импульсных реле, а по стороны датчика расположены по одноЮ му направляющему ролику и по одной считывающей магнитной головке, электрически соединенных одновременно своими об.мотками с выходом одного генератора, 5, Система по п. 1, отличаю - 15 Щ а я с я тем, что, с целью обеспечения надежной переговорной связи между судами при передаче грузов, к стальному тросику подвешен на карабинах телефонный кабель.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ГРУЗОПЕРЕДАЧЕ ТРАВЕРЗНЫМ СПОСОБОМ | 1971 |
|
SU428978A1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ЗАПОЛНЕНИЯ КУТКА РЫБОЛОВНОГО ТРАЛА РЫБОЙ | 1971 |
|
SU303030A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| Система определения параметров взаимного положения судов при траверзной передаче груза в море на ходу | 1974 |
|
SU727512A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОМЕХ | 1992 |
|
RU2112316C1 |