К недостаткам указанной системы относятся отсутствие плавного автоматического регулирования скорости грузовой тележки в зависимости от расстояния между ней и приемным Хпередаюш.им устройством), отсутствие автоматического управления движением грузовой тележки на мачте передающего (принимающего) устройства, отсутствие оперативного контроля процесса грузопередачи. Все эти недостатки приводят к снижению эффективности грузопередачи и безопасности передаваемого груза и грузовых устройств.
Известна также система управления двухканатной грузовой дорогой меледу судами в море на ходу, содержащая установленный на передающем судне блок следящего управления приводом дифференциальный лебедки, тахогенератор, связанный через редуктор с валом барабана лебедки, датчики расстояний грузового контейнера до передающего и приемного устройств, блок выбора режима, связанный одним из своих выходов с одним из входов блока коммутации, другие входы которого соединены соответственно с ручным и автоматическим задатчиками скорости движения грузового контейнера, а одним из выходов - с суммирующим элементом блока следящего управления .приводом дифференциальной лебедки, и установленные на принимающем и передающем судах блоки контроля процесса грузопередачи 2.
Недостатками такой системы управления являются низкая эффективность грузопередачи из-за отсутствия оперативной связи сигналов управления между передающим и принимающим судами и отсутствие защиты и предупреждения передаваемого груза от столкновения и ударов при подходе к передающему (принимающему) устройству.
Цель изобретения - повыщение эффективности и безопасности передачи груза.
Это достигается тем, что предлагаемая система снабжена установленными на передаюш,ем суднеблоком управления движением контейнера на мачте передающего устройства, пороговым блоком, одним блоком уплотнения информации и установленными на принимающем судне блоком управления движением контейнера на мачте принимающего судна, блоком аварийной отдачи канатной дороги и другим блоком уплотнения информации, при этом оба блока уплотнения информации свя заны кабель-тросом через токопереход, вход одного из них подключен к одному из выходов блока выбора режима, а другого - к блоку управления движением контейнера на мачте передающего устройства, а выходы их соответственно - к блокам контроля процесса грузопередачи и к одному из входов блока коммутации, другие входы которого соединены соответственно с выходом блока управления движением контейнера на мачте передающего устройства, с выходом порогового устройства, подключенного своим входом к выходу-датчика обратной связи блока следящего
управления приводом дифференциальной лебедки, к суммирующему элементу которого подключены через блок коммутации выходы датчиков расстояния грузового контейнера до 5 принимающего и передающего устройств, блок уплотнения информации на принимающем судне подключен к блоку аварийной отдачи канатной дороги и к блоку управления движением контейнера на мачте принимающего устройства, выход которого соединен с одним из входов блока контроля процесса грузопередачи, другой вход которого подключен к выходу блока аварийной отдачи канатной дороги.
Кроме того, блок аварийной отдачи ка15 натной дороги состоит из последовательно соединенных ручного задатчика, усилителя, реле времени и исполнительного механизма.
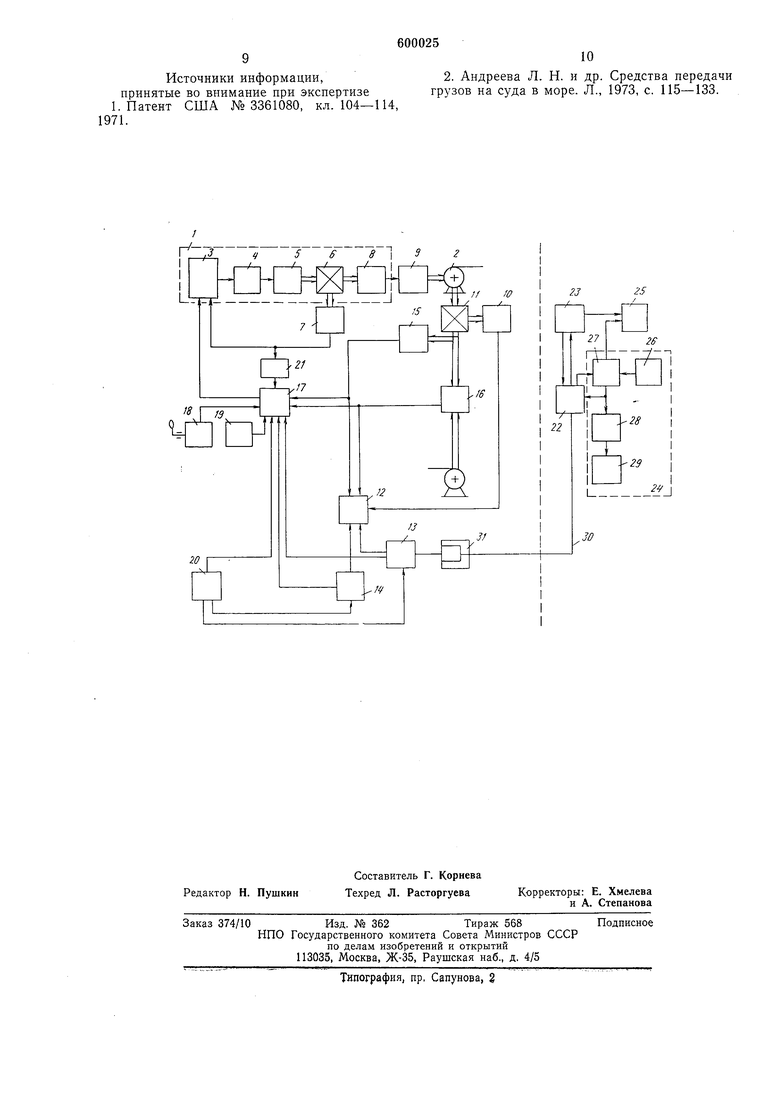
На чертеже нредставлена функциональная схема описываемой системы.
0 Система содержит установленные на передающем судне блок 1 следящего управления приводом дифференциальной лебедки 2, состоящий из последовательно соединенных суммирующего элемента 3, усилителя 4, двигателя 5, на валу которого установлен понижающий редуктор 6, выходы которого кинематически соединены с датчиком 7 обратной связи, например сельсин-датчиком, и насосом 8 переменной производительности, соединенным с 0 гидроприводом 9 лебедки 2, тахогенератор 10, кинематически связанный с редуктором 11, кинематически связанным € валом барабана вытравливаемой ветви каната лебедки 2, а электрически - с одним из входов блока 12 контроля процесса грузопередачи, другие входы которого подключены к выходу блока 13 уплотнения информации, одному из выходов блока 14 управления движением контейнера на мачте передающего устройства, с выходаQ ми датчиков 15 и 16 расстояния грузового контейнера до приемного и передающего устройств, выполненных в виде сельсин-датчиков, кинематически связанных с валом редуктора И; блок 17 коммутации, входы которого соединены с выходами ручного 18 и автоматического 19 задатчиков скорости движения грузового контейнера, выходами блока 20 выбора режима, блока 14, блока 13, датчиков 15 и 16 и порогового устройства 21, вход которого Q подключен к выходу сельсина-датчика 7.
Выход блока 17 коммутации подключен к одному из входов суммирующего элемента 3 блока 1.
На принимающем судне установлены блок
g 22 уплотнения информации, связанный своими
выходами соответственно со входами блока 23
управления движением грузового контейнера
на мачте принимающего устройства и входом
блока 24 аварийной отдачи канатной дороги,
Q выход которого соединен с одним из входов
блока 25 контроля процесса грузопередачи,
другой вход которого подключен к выходу
блока 23.
Блок 24 состоит из последовательно соединенных ручного задатчика 26, усилителя 27,
реле 28 времени и исполнительного механизма 29.
Блоки 13 и 22 уплотнения информации связаны между собой кабель-тросом 30 через токопереход 31.
Система работает следующим образом.
Начало работы определяется включением питания системы на блоке 20 выбора режима работы и переключения работы посредством задатчика 19 в автоматический режим. При этом сигналы с блока 20 поступают в блок 17 коммутации, в блок 14 управления движением грузового контейнера на мачте передающего устройства и через блок 13 уплотнения информации передающего судна, токопереход 31, кабель-трос 30, блок 22 уплотнения информации принимающего судна в блок 23 управления движением грузового контейнера на мачте принимающего устройства. По этим сигналам блок 14 обеспечивает подъем грузового контейнера в верхнее положение мачты передающего устройства, блок 23 обеспечивает подъем роловы принимающего устройства в верхнее положение мачты, а блок 17 коммутации подключает выход порогового устройства 21 к входу суммирующего элемента 3 блока 1.
После того как на мачтах передающего и принимающего устройств установлены в их верхнее положение (исходное) соответственно грузовой контейнер и голова приемного устройства, блоки 14 и 23 выдают сигналы в блок 17 коммутации и блоки 12 и 25 контроля. По этому сигналу блок 17 подключает выход задатчика 19 к входу суммирующего элемента 3 блока 1. При этом сигнал с выхода задатчика 19 через элемент 3 подается на вход усилителя 4, с выхода которого усиленный сигнал подается на управляющую обмотку реверсивного двигателя 5. Двигатель 5 через понижающий редуктор 6 перемещает люльку насоса 8 переменной производительности, задавая необходимую производительность гидроприводу 9 и направление его отработки на обеспечение движения контейнера с грузом в сторону принимающего груз судна. При этом задается производительность такая, что обеспечивается малая скорость отхода контейнера от передающего устройства. Одновременно с отработкой на насос 8 переменной производительности приводится во вращательное движение через редуктор 6 ротор сельсина-датчика 7, с выхода которого напряжение в противофазе сигналу с задатчика 19 подается на один из входов элемента 3, обеспечивая тем самым отслеживание перемещения люльки насоса 8 переменной производительности по входному сигналу на усилитель 4. Одновременно напряжение с выхода сельсина-датчика 7 подается на вход порогового устройства 21, которое срабатывает при некотором значении напряжения, соответствующем малой скорости отхода грузового контейнера от передающего устройства. С выхода порогового устройства 21 напряжение подается в блок 17 коммутации, который в этом случае срабатывает е временной задерж
кой порядка 4 с, что соответствует отходу грузового контейнера на малой скорости от передающего устройства порядка на 4-5 м. При срабатывании блок 17 отключает выход задатчика 19 от элемента 3 и подключает к нему выход датчика 16. При этом с выхода датчика 16 на вход элемента 3 подается напряжение, пропорциональное расстоянию от грузового контейнера до приемного устройства.
Таким образом, с этого момента происходит автоматическое регулирование скорости движения контейнера в сторону к приемному устройству в зависимости от расстояния между контейнером и приемным устройством.
В связи с тем, что сигнал, соответствующий этому расстоянию, в момент его подачи на вход элемента 3 имеет значительное значение, то скорость контейнера резко нарастает по сравнению со скоростью его отхода от передающего устройства и убывает плавно пропорционально уменьшению расстояния между контейнером и приемным устройством. При этом на расстоянии контейнера от приемного устройства порядка 4 м сигнал с датчика 16, подаваемый на вход элемента 3, обеспечивает посадочную скорость.
При входе контейнера в голову приемного устройства сигнал с выхода датчика 16 равен нулю, что определяет отработку люльки насоса 8 переменной производительности в нейтральное положение, соответствующее нулевой производительности гидропривода 9 дифференциальной лебедки 2.
Так как сигнал, снимаемый с выхода датчика 16, равен сигналу управления по амплитуде, но находится в противофазе с ним, то при достижении определенного минимального его значения, близкого к нулю, пороговое устройство 21 отрабатывает в нейтральное состояние блок 17 коммутации, который отключает с временной задержкой порядка 4 с, вполне достаточной с определенным запасом для захода и фиксации грузового контейнера в голове приемного устройства, выход датчика 16 от входа элемента 3 блока 1.
При заходе грузового коитейнера в голову приемного устройства блок 23 автоматического управления двил ением грузового контейнера на мачте принимающего устройства выдает сигнал через блок 22 уплотнения информации, кабель-трос 30, токопереход 31, блок 13 уплотнения информации на передающем судне в блок 17 коммутации, который по этому сигналу отключает от элемента 3 все цепи управляющих сигналов. Одновременно этот сигнал подается в блоки 25 и 12 контроля.
Далее блок 23 обеспечивает опускание головы приемного устройства с грззовым контейнером на палубу, его разгрузку и подъем в верхнее положение мачты приемного устройства.
После разгрузки контейнера и фиксации головы приемного устройства в верхнем положении блок 23 выдает сигнал через блок 22, кабель-трос 30, токопереход 31, блок 13, блок
17 коммутации. Одновременно этот сигнал подается в блоки 25 и 12 контроля. По этому сигналу блок 17 подключает задатчик 19 к входу элемента 3 таким образом, что сигнал с него подается в противофазе сигналу, подаваемому с задатчика 19 при движении контейиера в сторону к принимающему груз судну. Это обеспечивает отработку следящим блоком 1 перемещение люльки насоса 8, определяющее движение грузового контейнера в сторону передающего судна с малой скоростью. При отходе грузового контейнера от передающего устройства иа расстояние порядка 2 м сигнал с выхода датчика 7, подаваемый на вход порогового устройства 21, обеспечивает его срабатывание. При этом сигнал с устройства 21 поступает на блок 17, который, срабатывая, отключает выход задатчика 19 от входа элемента 3 и подключает к нему выход датчика 15.
Сигнал с датчика 15, пропорциональный расстоянию грузового контейнера от передающего судна (устройства), поступает иа вход элемента 3, что обеспечивает, начиная с этого момента, автоматическое регулирование скорости движения грузового контейнера к передающему груз судну по этому управляющему сигналу. Сигнал с датчика 15 также одновременно поступает в блок 12 контроля.
В первый момент времени скорость грузового контейнера резко возрастает, а затем постепенно плавно убывает и на расстоянии от передающего судна порядка 4 м становится равной посадочной. При этом сигнал с датчика 7 становится по амплитуде равный такому значению, что пороговое устройство 21 выдает сигнал в блок 17 коммутации, который отключает с временной задержкой порядка 4 с, что вполне обеспечивает фиксацию грузового контейнера в голове передающего устройства, выход датчика 15 от входа элемента 3. После фиксации контейнера в голове передающего устройства блок 14 выдает сигнал в блок 17 коммутации, который в результате этого отключает все цепи управляющих сигналов от элемента 3. Этот сигнал также подается в блок 12 контроля. После этого блок 14 обеспечивает опускание грузового контейнера на палубу, его загрузку и подъем в верхнее положение мачты передающего устройства. На этом цикл автоматического управления передачей груза заканчивается.
Система допускает также ручной режим работы (автоматизированный).
В результате переключения на блоке 20 выбора режимов выдается сигнал в блок 17 коммутации, который подключает выход ручного задатчика 18 к входу элемента 3. В отличие от автоматического режима работы блок 17 коммутации в ручном режиме работы не подключает выходы датчиков 15 и 16, порогового устройства 21 и задатчика 19 к входам эле мента 3 и управление ведется оператором пу тем ручного управления задатчиком 18, орит . ентируясь нэ noK&sapHg Одока 12 контроляФормула изобретения
1.Система управления двухканатной грузовой дорогой между судами в море на ходу, содержащая установленный на передающем судне блок следящего управления приводом дифференциальной лебедки, тахогенератор, связанный через редуктор с валом барабана лебедки, датчики расстояний грузового контейнера до передающего и приемного устройств, блок выбора режима, связанный одним из своих выходов с одним из входов блока коммутации, другие входы которого соединены соответственно с ручным и автоматическим задатчиками скорости грузового контейнера, а одним из выходов - с суммирующим элементом блока следящего управления приводом дифференциальной лебедки, и установленные на принимающем и передающем судах блоки контроля процесса грузопередачи, отличающаяся тем, что, с целью повышения эффективности и безопасности передачи груза, она снабжена установленными на передающем судне блоком управления движением контейнера на мачте передающего устройства, пороговым блоком, одним блоком уплотнения информации и установленными на дринимающем судне блоком управления двилсением контейнера на мачте принимающего
.судна, блоком аварийной отдачи канатной дороги и другим блоком уплотнения информации, при этом оба блока уплотнения информации связаны кабель-тросом через токопереход, вход одного из них подключен к одному из
выходов блока выбора режима, а другого - к блоку управления (Движением контейнера на мачте передающего устройства, а выходы их соответственно - к блокам контроля процесса грузопередачи и к одному из входов
блока коммутации, другие входы которого соединены соответственно с выходом блока управления движением контейнера на мачте передающего устройства, с выходом порогового устройства, подключённого своим входом
к выходу датчика обратной связи блока следящего управления приводом дифференциальной лебедки, к суммирующему элементу которого подключены через блок коммутации выходы датчиков расстояния грузового контейнера до принимающего и передающего устройств, блок уплотнения информации на принимающем судне подключен к блоку аварийной отдачи канатной дороги и к блоку управления движением контейнера на мачте принимающего устройства, выход которого соединен с одним из входов блока контроля процесса грузопередачи, другой вход которого подключен к выходу блока аварийной отдачи канатной дороги.
2.Система до п. 1, отличающаяся тем, что блок аварийной отдачи канатной дороги состоит из последовательно соединенных ручного задатчика, усилителя, реле времени и ИС
цолнйтельнрго меаднизма,
Источники информации, принятые во внимание при экспертизе 1. Патент США №3361080, кл. 104-114, 1971.
2. Андреева Л. Н. и др. Средства передачи грузов на суда в море. Л., 1973, с. 115-133.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления передачей сухих грузов между судами на ходу | 1974 |
|
SU616187A1 |
| Способ управления траекторией движения судна | 1980 |
|
SU908656A1 |
| Система автоматического управления судном | 1980 |
|
SU948772A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
