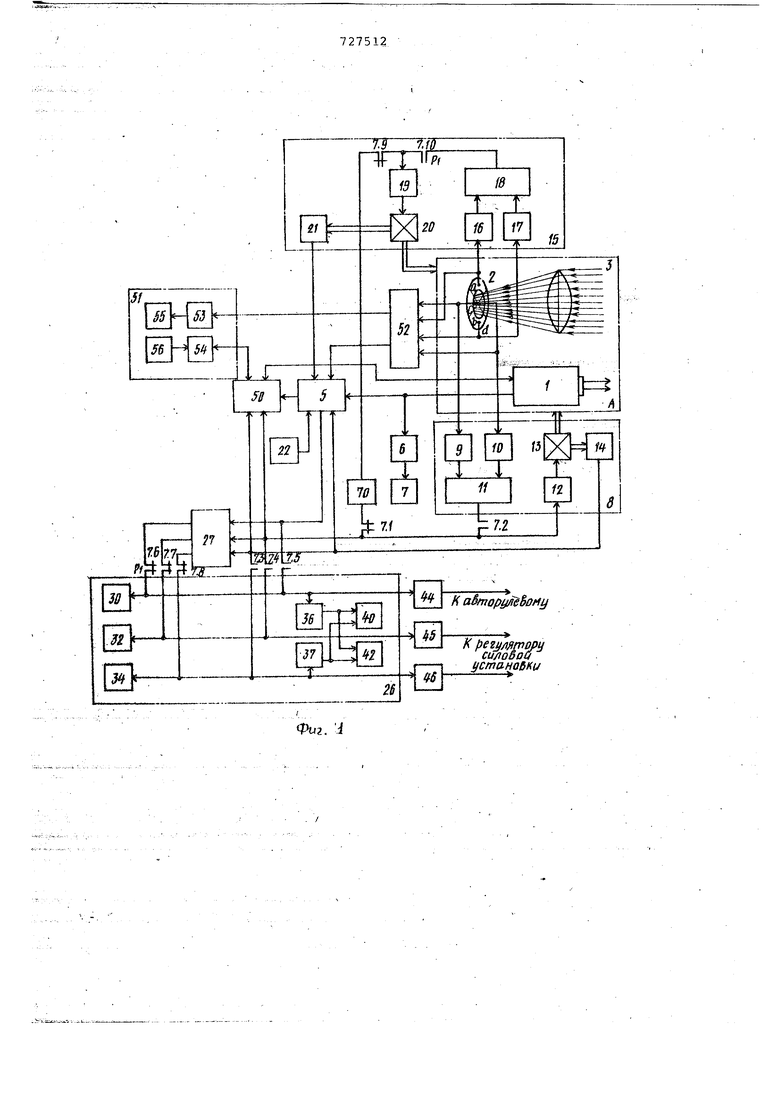
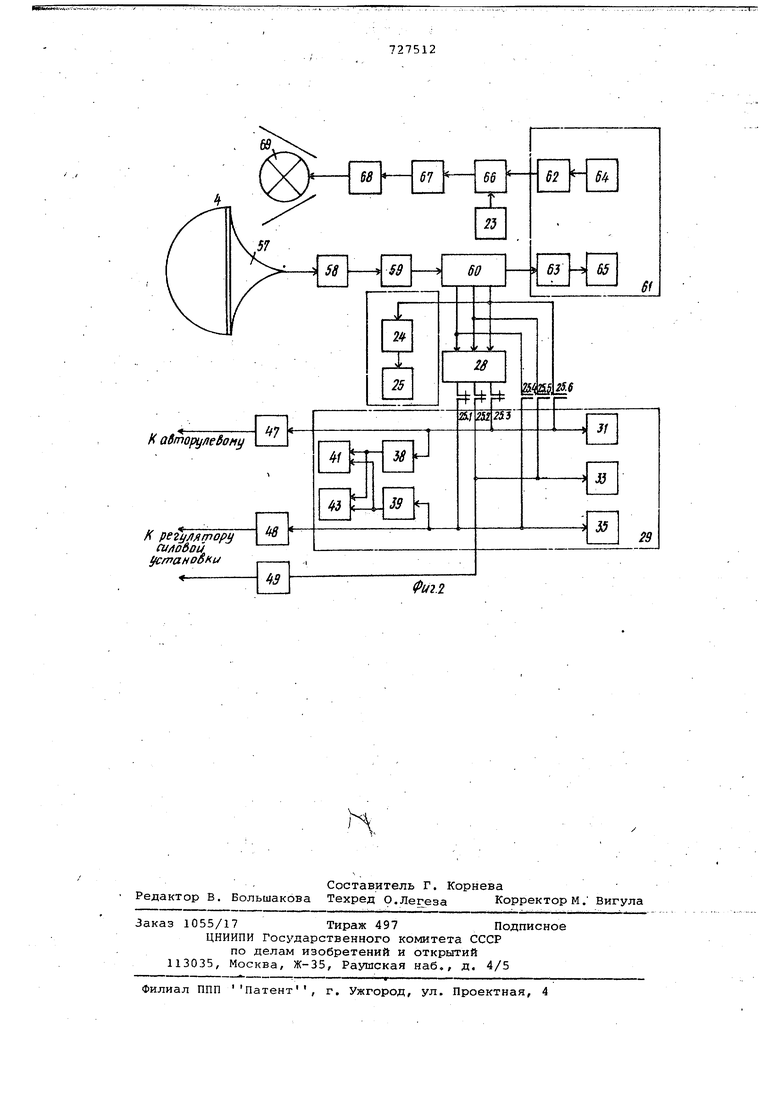
(54) СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ТРАВЕРЗНОЙ ПЕРЕДАЧЕ ГРУЗА В МОРЕ НА ХОДУ вьш устройством б с подключенным на его выходе реле 7 с контактами 7.17.10v В систему входит также устройство S HSMeipeHHH взаимного продольного смещения судов. Оно состоит из усилителей 9, 10, выходы которых подключены к входам сравнивающего блока 11, который через контакт 7.2 реле 7 соединен с электродвигателем 12; Последний выходным валом соеди Кен с входом понижающего редуктора 13, к «оторому механически крепится датчик 14 Смещения отслеживгиощих движений головки устррйств. К выходам фотодиода 2 подключено |также устройство 15 измерения вертикального отклонения мерной линии от перпендикуляра к диаметральной плоскости разгружаемого судна, которое по своей структуре аналогично устройству 8 и содержит усилители 16 и 17, сравнивающий блок 18, эЛектродвигатёль 19, редуктор 20 и датчи ,21 смещения. К ОДНИМ входам cy йu иpyющeгo блока 5 подключены датчик 22 качки разгру:ЖёмЙ1о сУдна.и через линию сйязи да чик 23 (фиг. 2) качки принимающего. судна. Выход суммирующего блока 5 1Ш5Х:Мй ёИЧерез линию связи К порого вОму устройству ПУ 24принимающего ЧолукЬ Лглёкта с подключенным к его выходу реле 25, а также с индикатор ным блоком -26 через блок 27 памяти .и контакты 7.6-7.8 реле 7, а также через линию связи - с блоком 28 памяти и через контакты 25.1-25.6 рел 25 - с индикаторным блоком 29 принимающего судна (фиг. 2). Индикаторные блоки 26 и 29 содер жат индикаторы 30 и 31 расстояния, индикЪторы 32, 33 dkdpoc;TH смёщёния и индикаторы 34, 35 смещения. Парал индикаторам 30, 31 и 34, 35 подключены пороговые устройства 36, 37 и 38, 39, соединенные своими выходами С устройствами звуковой 40 и 41 и световой 42, 43 сигнализации Выходы индикаторных блоков соединены с согласующими устройствами 44, 45, 46 (фиг. 1) и 47, 48, 49 (фиг. Эти устройства служат для передачи соответствующей информации к регуляторам силовой установки и авторул вому судов. -ч Линия связи между судами полуком разгружаемого судна (фиг. -1) из. блока 50 уплотнения, сое диненного своими входами с выходом суммирующего блока 5, с электрическими выходами устройства 8, с перег ворным устройством 51, а выходом с входом светодальномера 1 устройст измерения расстояния между судами, из блока 52 разделения, входы которого соединены с секторами фотодиода 2, а выходы - с суммирующим блоком 5 и .переговорным устройством 51 В состав переговорного устройства 1 входят два усилителя низкой час- оты 53, 54, соединенные соответствено с громкоговорителем 55 и микрофоом 56. В полукомплекте принимающего суда (фиг. 2) предусмотрен световод 7, оптически соединяющий отражатель с фотоэлектронным умножителем 58. ыход умножителяi 58 соединен через силитель 59 с блоком 60 разделения. ыходы блока 60 соединены через конакты 25.4-25.6 реле 25 с индикаторым блоком 29, с блоком 28 памяти, пороговым устройством 24, с переоворным устройством 61, которое сосоит из усилителей 62, 63 и связаных с ними соответственно микрофона 4 и громкоговорителя 65. Выходусилителя 62 соединен с блоком 66 уплотнения, второй вход которого соединен с датчиком 23 качки, а выход - с усилителем 67 поднесущих, который соединен с модулятором 68, подключенном к источнику 69 монохроматического света. Для осуществления сканирования головки наведения в полукомплекте раз- . гружаемого судна (фиг. 1) установлен программный блок 70 поиска, который через контакты 7. 1 и 7.9 реле 7 соединен с электродвигателями 12 и 19 устройств 8 и 15. Система работает следующим образом. Излуч:ение источника 69 монохроматического света принимающего полукомплекта фокусир ется оптическим элементом 3 на секторах фотодиода 2 головки наведения. С секторов фо тодиода 2 электрические сигналы поступают на входы устройств 8 и 15 .-. которые Ориентируют головку наведения строго на источник 69. Положение головки наведения регистрируется . датчиками 14 и 21 смещения, сигналы с KOTOpfcix поступают в суммирующий блок 5. Туда же поступают сигналы с выхода светодальномера :i устройства измерения расстояния между судами и с датчиков 22 и 23 качки. В суммирующем блоке 5 происходит масштабирование сигналов и их алгебраическое суммирование. В результате этого Hh выходе блока 5 формируется электрический сигнал, несущий информацию о истинном значений расстояния между судами измеренного по линии перпендикуляра к диаметральной плоскости разгружаемого судна. Сигналы о взаимном продоль.ном смещении и скорости смещения судов формируются на выходах сравнивакицегО блока 11 и датчика 14 смещения. Эти информационные сигналы поступают в индикаторные блоки 26 и 29, а также в блоки 27, 28 памяти. Сигналы расстояния и смещения поступают также на пороговые устройства 36, 37, 38, 39, которые при выходе изме ряемого параметра за границу допустимого срабатывают и включают устро ства звуковой 40, 41 и световой 42, 43 сигнализации. , Взаимосвязь между полукомплектам системы осуществляется следующим образом. В полукомплекте разгружаемого .судна информационные сигналы, а также сигнал с переговорного устр ства 51 поступают в блок 50 уплотнения. Суммарный информационный сигнал с блока 50 поступает на вход светодальномера 1, где модулирует луч источника излучеяия светодальномера. Часть энергии луча, попадающего на отражатель 4 возвращается обратн к светодальномеру 1, где участвует в формировании информационного сигнала о расстоянии между судами. , Другая часть энергии луча передается световодом 57 для преобразования и усиления на умножитель 58 и усилитель 59. Усиленный, сигнал поступает в блок 60 разделения, где происходит демодуляция и разделение полезной информации. С выхода блока 60 сигналы в соответствии с их назначением поступают на индикаторный блок 29, блок 28 памяти и переговор ное устройство 61 принимающего судна. Для передачи информации с приним щего судна на передающий сигналы с датчика 23 качки и переговорного устройства 61 поступают в блок 66 уплотнения, с которого сформированный суммарный информационный сигнал после усиления усилителем 67 поднесущих подводится к модулятору 68 дл модуляции несущей источника 69 моно хроматического света, В полукомплек разгружаемого судна этот сигнал с фотодиода 2, кроме вышеуказанного поступает в блок 52 разделения, фуй циональное назначение которого аналогично блоку 60 принимающего полукомплекта. С выхода блока 52 сигналы качки принимающего судна поступают в суммирующий блок 5, а телефонной связи - в переговорное устро ство 51. При рассогласовании головки наведения с источником 69 монохромати .ческого света или, что одно и то же, луча светодальномера 1 с отражателем 4 нарушается связь между полукомплектами. При этом на выходе устройства измерения расстояния {светодальномера 1) пропадает информационный сигнал о расстоянии, что приводит к переключению порогового устройства 6, которое обесточивает реле 7. Реле 7 своими контактами на время отсутствия сигнала со светодальномера 1 подключает к индикаторному блоку 26 блок 27 памяти, где хранится последнее действительное .значение текущей информации о взаимном положении судив, отключая от индикаторного блока другие источнидси информации. В полукомплекте принимакяцего судна подключение блока 28 памяти к индикаторному блоку 29, а также , отключение от последнего блока 60 осуществляется контактами реле 25. Управление работой реле 25 производится пороговым устройством 24,. которое срабатывает от сигнала о расстоянии между судами, поступающего с блока 60 разделения. Сканирование головки наведения по заданной программе с целью поиска, захвата источника 69 света принимающего полукомплекта производится сигналами программного блока 70 поиска, которые поступают в устройства 8 и 15. Формула ,; изобретен1{я Система определения параметров взаимного положения судов при траверзной передаче груза в море на ходу, содержащая устройство изме- ; ренй-я расстояния между судами, взаимного продольного смещения судов, вертикального отключения мерной линии от перпендикуляра к диаметральной; плоскости разгружаемого судна, датчики качки взаимодействующих судов, соединенные с суммирующим блоком, выходы которого связаны с индикаторными блоками, отличающаяс я тем, что,с целью повышения надежности системы, она снабжена установленными на обоих судах и подключенными к выходам устройств измерения расстояния между судами пороговыми устройствами с реле на их выходах и блоками памяти включенными через контакты реле пороговых устройств в цепь связи cyMMHpsToiflero и индикаторных блоков. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 428978, кл. В 63В 27/18, 05.04.71.
Фиг. i
srr
устанабки
К aSmopy/ieSo/iy
К регулятору еи/1овой установки
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ГРУЗОПЕРЕДАЧЕ ТРАВЕРЗНЫМ СПОСОБОМ | 1971 |
|
SU428978A1 |
| Система определения взаимного положения судов при грузопередаче на ходу траверзным способом | 1972 |
|
SU511248A1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| Система автоматического управления судном | 1980 |
|
SU948772A1 |
| Система автоматического управления передачей сухих грузов между судами на ходу | 1974 |
|
SU616187A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Устройство для стабилизации на заданной глубине опущенных на канате объектов | 1976 |
|
SU598793A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| КОРАБЕЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2000 |
|
RU2165063C1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |