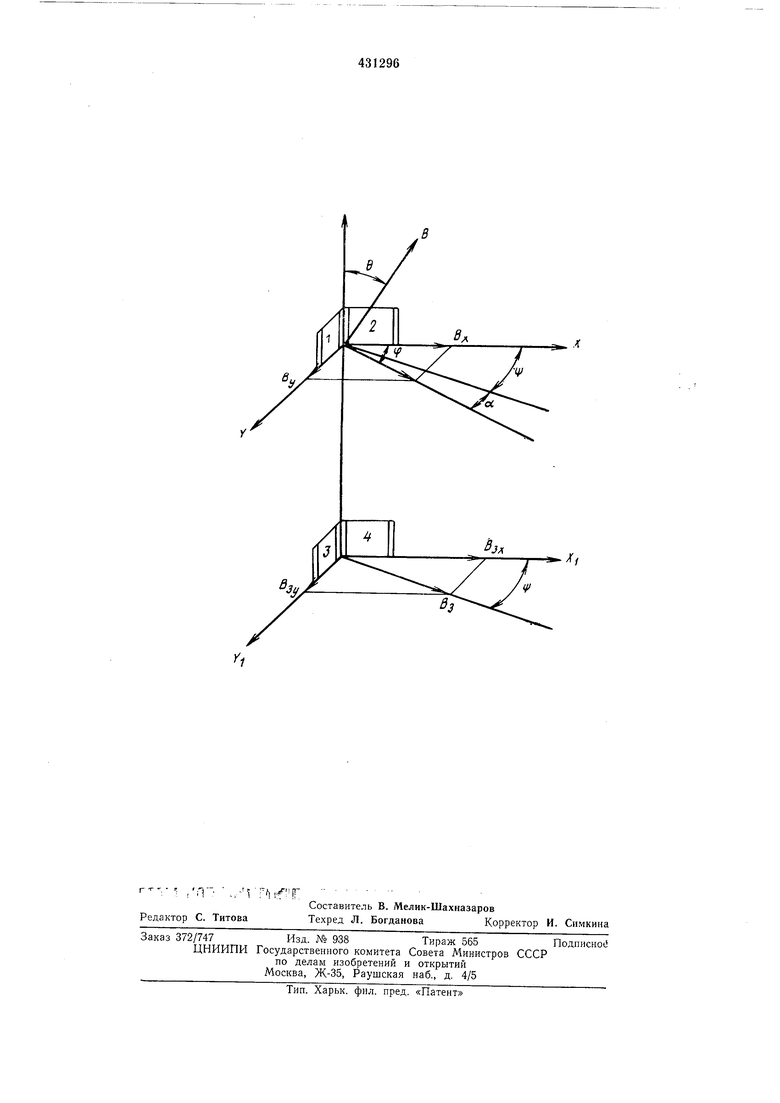
Известен способ определения отклонения скважин, основанный на нзмере,ний1 азимута и зенитного угла. Уго.т отклонения скважин измеряют С 1помош,ью двухкоординатного индукционнаго датчика, -статор которого жестко закреплен относительно Магнитомодуляционных датчиков со взаимно параллельными осями чувствительности, что возможно при наличии вращающегося |Магнитного поля. Недостаткам известного способа -является сложность созда-нпя вращающегося .магнитного поля, низкая точность измерения. С целью повышения точности измерения отклонения скважины азимут определяют по разности фаз сиг-налов с датчика азимута и зеиитного угла, а зенитный угол - по модулю выходного сигнала датчика зенитного угла. На чертеже изображена схема датчиков Холла для осуществления предлагаемого способа. Спасаб заключается з следующем. ;Когда скважпнный снаряд изменяет авое положение в пространстве, из меняется направление магнитного поля В электромагнита. На выходах элементов датчика Холла / и 3 и, .соот:ветственно, 2 и 4, расположенных в двух 1взаи,мноортогональных вертикальных 1плосх0стях, появляются электрические сигналы, лараКтеризующие ориента цию сквалсины в -момеит измерения. В частюсти, зенитный уГОл определяется по .модулю вы.чодно.го сигнала датчика зенитного угла, состоящего из элементов датчика Холла / и .2, а азимут определяется по разности фаз сигналов с датчика азим)ута, состоящего из элементов датчиков Холла 3 и 4, и датчика угла. При отклонении скважины на элемент датчика Холла 7 действует составляющая Вх ма;гннтного поля электромагнита, а на элемент датчика Холла 2 - составляющая В,,. В результате модуль суммарной э.д.с., снимае1МОЙ с элементов датчиков Холла / и 2, пропорцио.нален sin 0, где 0 - зенитный угол. Фаза э.д.с. определяется углом ср. Элементы датчиков Холла 5 и 4 реагируют, соответственио, на соста.вляющ е B,j, и Вду магнитного поля Зе:млн В. Фаза сигнала, снимаемого с датчика азимута, равна углу г|з, где ф ф-а. Следовательно, азимут а определяется как :разнОСть углов ф и oj;.. Предмет н зобретения Способ определения отклонения скваж1шы, основанный на измерении азимута н зенитного угла, отличающийся тем, что, с повыщения точности измерений, азимут определяют по разности фаз сигналов с датчика ази.мута и зенитного угла, а зенитный угол - по .модулю выходного сигнала датчика зенитного угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ И УГЛА ПАДЕНИЯ | 1968 |
|
SU231030A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ В ПРОЦЕССЕ БУРЕНИЯ | 2014 |
|
RU2586341C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРА НАПРЯЖЕНИЯ ПЕРЕМЕННОГО ТОКА | 1966 |
|
SU215323A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| Инклинометр | 1984 |
|
SU1183669A1 |