1
Изобретение относится к области автоматического регулирования химических процессов.
Известны пневматические (гидравлические) следящие усфойства, предназначенные для управления регулирующими органами в сиетемах автоматического регулирования, в основу которых заложеи ириицип управления работой силового элемента и перемещение самого элемента посредством сжатого воздуха (жидкости).
Известные следящие устройства содержат золотниковое устройство, стержень золотника которого жестко соединен с мембраной командной камеры и посредством пружины обратной связи - с муфтой предельного момента и выходным валом редуктора, а выходные каналы подключены к камерам распределительного устройства.
Цель изобретения - повысить статическую и динамическую точность следящего привода.
Достигается это тем, что следящий роторный привод содержит двухсекционный дезаксиальный механизм, выходной вал которого соединен с входным валом редуктора, а силовые камеры подключены к соответствующим камерам распределительного устройства.
Двухсекционный дезаксиальный механизм выполнен в виде колеса с диаметрально расположенной полостью, внутри которой установлен эксцентриковый порщень с укрепленным па нем выходным валом.
Силовые камеры дезаксиального механизма образованы свободными объемами полости колеса по обе стороны от эксцентрикового порщия.
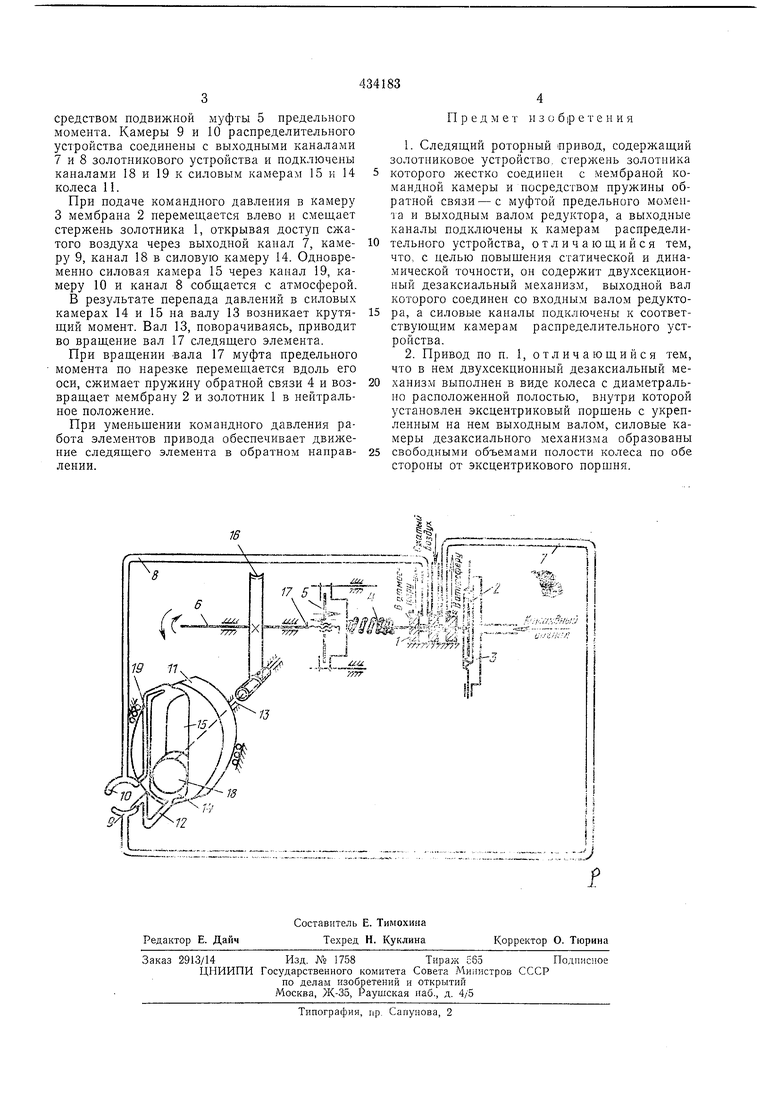
На чертеже изображена схема привода (условно показан одпосекционный дезаксиальный механизм).
Предлагаемый следящий привод содержит золотниковое устройство, включающее в себя стержень золотника 1, соединенный с мембраной 2 командной камеры 3 и посредством пружины 4 обратной связи - с муфтой 5 предельного момента п выходным валом 6 редуктора, а силовые каналы 7 и 8 подключены к соответствующим камерам 9 и 10 распределительного устройства. Двухсекцио ный дезаксиальный механизм выполнен в впде колеса 11, имеющего диаметрально расположенную полость, внутри которой установлен эксцентриковый поршень 12 с укрепленным на нем выходным валом 13.
Силовые камеры 14 и 15 дезаксиального меxaini3Ma образованы свободными объемами полости колеса 11 по обе стороны от эксцентрикового поршня 12. Редуктор 16 соедипяет дезаксиальный механизм со следящим элементом, выполненным в виде выходного вала 17, соединенного с пружиной 4 обратной связи по
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСКРЕТНЫЙ ПОВОРОТНЫЙ ПРИВОД | 2016 |
|
RU2642010C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
| Рулевое управление | 1978 |
|
SU796331A1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ НЕПРЯМОГО ДЕЙСТВИЯ | 2021 |
|
RU2780434C1 |
| МУФТА ГИДРОДИНАМИЧЕСКАЯ РЕГУЛИРУЕМАЯ ИЗМЕНЕНИЕМ НАПОЛНЕНИЯ | 2012 |
|
RU2523338C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА МАШИНЫ С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2529111C1 |
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1973 |
|
SU398763A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
