1
Изобретение относится к области измерительной техники, в частности к измерению лилейных размеров и перемещений.
Известны следящие системы с цифровым отсчетом, содержащие формирователь, соединенный со счетчиком, .и измеритель рассогласования, связанный через усилители напряжения и мощности с двигателем, на валу которого установлен тахогенератор, подключенный через нелинейное корректирующее устройство к входу усилителя мощности. При этом выход двигателя через редуктор связан с преобразователем угла, соединенным с выпрямителем. В таких системах амллитуда и фаза сигнала, поступающего со схемы включения преобразователя угла на формирователь, зависят от скорости вращения исполнительного двигателя, которая при измерении в динамическом .режиме изменяется в щироком диапазоне. Это вызывает динамическую погрещиость контроля.
Предлагаемая следящая система отличается от известных тем, что она содержит функциональный преобразователь и сумматор, один вход которого соединен с выходом выпрямителя, другой - с выходом тахогенератора, а выход - с входом формирователя.
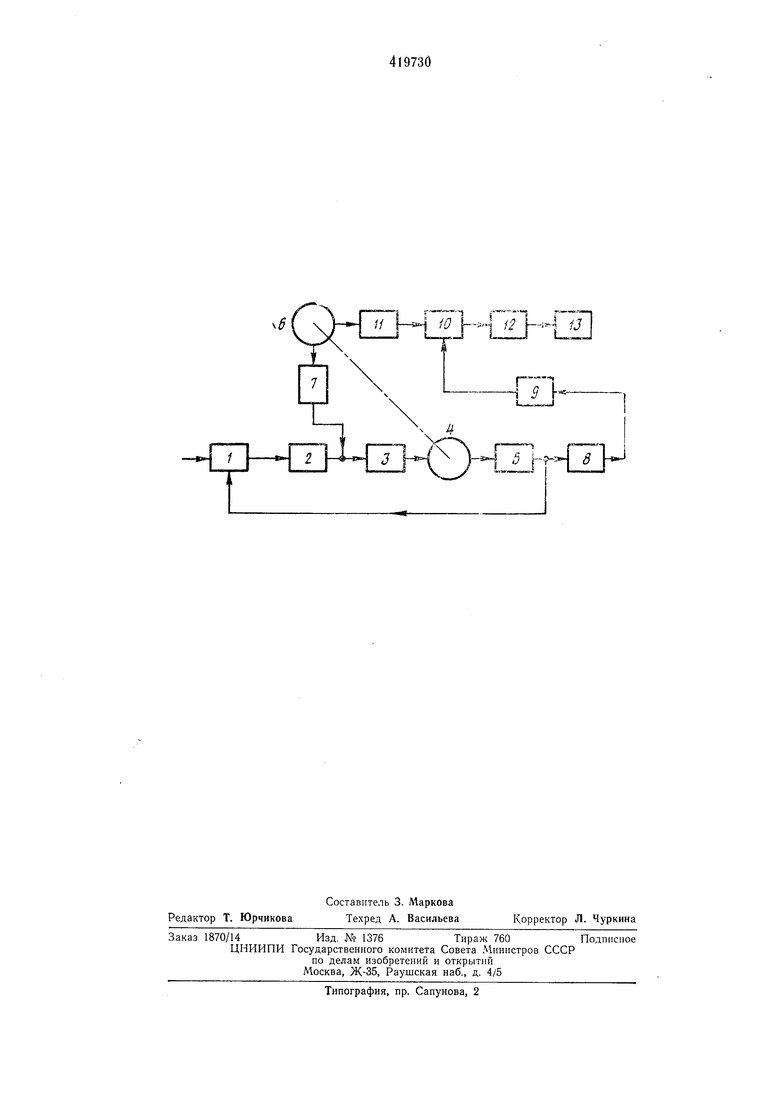
Па чертеже изображена блок-схема предлагаемой следящей системы.
Измеритель 1 рассогласования, представляющий собой, например, бесконтактный индуктивный датчик и воспринимающий изменение размера детали или ее перемещение, через
усилители 2 напряжения и 3 мощности подключен к исполнительному двигателю 4, который через редуктор 5 связан с измерителем рассогласования. Для улучщения качества переходного процесса и устранения автоколебаний в системе применена нелинейная отрицательная обратная связь по скорости исполнительного двигателя, осуществляемая с помощью тахогенератора 6, вал которого связан с валом исполнительного двигателя. Выход тахогенератора через нелинейный корректирующий элемент 7 соединен с входом усилителя мощности.
Величина перемещения первичного преобразователя регистрируется с помощью цифрового отсчетного устройства, состоящего из индуктивного преобразователя 8 угла, представляющего собой индуктивный многополюсный преобразователь, ротор которого связан с валом исполнительного двигателя, и фазечувствительного выпрям.ителя 9, включенного на выходе нреобразователя угла. Выход выпрямителя соединен с одним входом сумматора 10, другой вход которого подключен к выходу функционального преобразователя 11, а
выход сумматора соединен с формирователем 12, включенным на входе реверсивного счетчика 13. ВслелТ,ствие затухания и заназдывания, вносимого фильтром, обычно стоящим из выхода вынрямителя, напряжение на его выходе в динамическом режиме работы бд отличается по амплитуде и сдвинуто по фазе ф относительно напряжения в статическом режиме работы Uc,. Эти изменения обусловливают динамическую погрешность цифрового отсчета системы Aav;, которая равна величине смещения одного из фронтов импульсов на выходе формирователя, имеющего порог срабатывания Lcp (переднего при вращении вала двигателя в одну сторону и заднего при вращении в другую сторону). Компенсация динамической погрещности может быть осуществлена за счет сдвига сигнала с выхода фазочувствительного выпрямителя на величину UCM, зависящую в основном от скорости вращения исполнительного двигателя и типа фильтра на выходе выпрямителя. Поэтому характеристика функционального преобразователя рассчитывается в зависимости от типа фильтра на выходе выпрямителя. Так, например, для простейщего / С-фильтра напряжение на выходе функционального преобразователя в зависимости от напряжения па входе (напряжения с выхода тахогенератора) должно изменяться по закону см - д,„ sin (а, - ср), ,.,АФ Yi-,(Ku,f ttj arc sin f arctg KUr, ,,. Tt-mT SOiKj-, T RC - постоянная времени фильтра, - напряжение на выходе функционального преобразователя, t/cp - порог срабатывания формирователя, дт и f/c,n - амплитуды огибающих модулированного напряжения на выходе фазочувствительного выпрямителя в динамическом и статическом режимах работы системы соответственно, Кф - коэффициент передачи фильтра, иг - напряжение на выходе тахогенератора, т - количество зубьев индуктивного преобразователя угла, i -передаточное отношение редуктора. Работает система .следующим образом. Вначале настраивают систему так, чтобы при определенном зазоре между торцом первичного преобразователя и поверхностью измеряемой детали напряжение на выходе измерителя 1 рассогласования была равно нулю. Тогда напряжение на обмотке управления исполнительного двигателя 4 отсутствует и система неподвижна. При изменении размера детали или ее перемещении на выходе измерителя рассогласования возникает сигнал, который после усиления в усилителях 2 напряжения и 3 мощпости поступает в обмотку управления исполнительного двигателя. Последний через редуктор 5 перемещает измеритель рассогласования в направлении изменения размера детали до устранения сигнала рассогласования на входе системы. Вместе с валом исполнительного двигателя вращается ротор индуктивного многополюсного преобразователя 8, осуществляя модуляцию напряжения на выходе фазочувствительного выпрямителя 9, огибающая которого поступает на один из входов сумматора 10. При вращении исполнительного двигателя вран 1;ается и тахогенератор 6, напряжение с выхода которого, пропорциональное скоростивращения двигателя, проходит на нелинейный корректирующий элемент 7, а затем на вход усилителя мощности и используется для стабилизации следящей системы. Кроме того, напряжение с выхода тахогенератора через функциональный преобразователь 11 подается на другой вход сумматора, где складывается с напряжением, поступающим с выхода вылрямителя, осуществляя тем самым коррекцию динамической погрешности цифрового отсчета системы. Количество импульсов на выходе формирователя 12 подсчитывается реверсивным счетчиком 13. Предмет изобретения Следящая система с цифровым отсчетом, содержащая формирователь, соединенный со счетчиком, измеритель рассогласования, выход которого через усилитель напряжения и усилитель мощности соединен с двигателем, на валу которого установлен тахогенератор, выход которого через нелинейное корректирующее устройство подключен к входу усилителя мощности, при этом выход двигателя через редуктор связан с преобразователем угла, соединенным с выпрямителем, отличающаяся тем, что, с целью повышения точности цифрового отсчета в динамическом режиме работы системы, она содержит функциональный преобразователь и сумматор, один ход которого соединен с выходом выпрямителя, другой - с выходом тахогенератора, а выход - с входом формирователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1978 |
|
SU746406A1 |
| Следящая система | 1981 |
|
SU993202A1 |
| БИБЛИОТЕЧКА | 1972 |
|
SU347736A1 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система | 1985 |
|
SU1290251A1 |