9д Эд
:л
а I Изобретение относится к средствам автоматики, может .быть использовано при управлении антеннами, телескопами, гелиостатами и являет усовершенствованием известной сиетемы по авт.св. № 746406. Целыо изобретения является повышение быстродействия и динамической точности системы. На фиг.1 представлена структурная схема системы; на фиг.2 - характеристика нелинейного блока} нафиг.З - один из возможных вариантов выполнения нелинейного блокад на фиг.4 и 5 - возможные вариайты включения усилителя мощности в системы на фиг.6 - характеристика релейного блока;на фиг. 7 - эпюры выходных сигналов основных блоков системы. Система содержит измеритель 1 рассогласования, предварительный усилитель 2, усилитель 3 мощности, исполнительный двигатель 4, редуктор 5, датчик 6 угла, датчик 7 скорости, пороговое устройство 8, .блок 9 совпадения, согласующее устройство 10, первый и второй ключи 11 и 12, нелинейное корректирующее устройство 13, первый и второй сумматоры 14 и 15, нелинейный блок 16 релейный блок 17, первый-и .второй диоды 18 и 19, первый и второй пере менные резисторы 20 и 21, операцион ный усилитель 22, (U. - выходной си нал i-го функционального блока, f а oL входное воздействие и выходной сигнал системы, - сигнал рассогласования или выходной сигнал измерителя 1 рассогласования). Известно, что передаточная функция исполнительного двигателя 4 может быть представлена в виде ВД-,/;.. , (1) Р(Т,ЯМ) где К, Т - коэффициент усиления и постоянная времени и полнительного двигателя 4. Для оптимального по быстродействию управления исполнительным двига телем 4, имеющего передаточную функ цию вида (1), при отработке им начальных рассогласований необходимо реализовать оптимальный алгоритм управления , (2) 6 , 2 6 E-(sign U)tU| + (),(3) signd , (4) де & - функция переключения; ,g- сигнал рассогласования и его производная-, « - управляющее воздействие М- модуль управляющего воздействия. Следящая система работает следуюим образом. При появлении на первом входе измерителя 1 рассогласования следящей системы задающего входного воздействия , которое сравнивается с сигналом и, - oi , поступающим на его второй вход с выхода датчика 6 угла, на его выходе появляется сигнал . рассогласования который поступает на вход предварительного усилителя 2. Кроме того, сигнал Uj, с выхода датчика 6 угла поступает на вход порогового устройства 8. При усле поворота oi выходного вала системы, меньшем предельного, сигнал Ug на выходе датчика 6 угла не превьш1ает порогового значения Uj и на выходах порогового устройства 8 и блока 9 совпадения сигнал отсутствует. С выхода согласующего устройства 10 на управляющие входы ключей 11 и 12 поступает сигнал, который удерживает первьй ключ 11 в открытом состоянии, а второй ключ 12 в закрытом. Усиленный предварительным усилителем 2 сигнал рассогласования , где К - коэффициент усиления предварительного усилителя 2, поступает на первый вход первбго сумматора 14 и второй вход второго сумматора 15, входящих в состав нелинейного .корректирзпощего устройства 13. На второй вход первого сумматора 14 поступает сигнал U-j с выхода датчика 7 скорости, который / представляет собой производную от сигнала рассогласования (так как г «const и g-- о следовательно, Е (ro), т.е. производная от сигнала рассогласования есть величина, пропорциональная скорости вращения И вала исполнительного двигателя ). В результате суммирования сигналов i2 к Vj на выходе первого сумматора 14 появляется сигнал , соответствующий выражению (2), который поступает на . вход нелинейного блока 16, реализ ощего нелинейную функцию «ида
U,,F(U«) (sign 11,4) ОЧ.К
+ (1-ef ),(5)
трафик которой показан на фиг.2.
Сигнал с выходу нелинейного блока 16 поступает на первый вход второго сумматора 15, на выходе которого появляется сигнал , соответствующий функции переключения (3) и поступающий на вход двухпозиционного репейного блока 17 реализующего оптимальный по быстродействию алгоритм (4) управления исполнительным двигателем 4 при отработке следящей системой начальных рассогласований .
При достижении выходным валом системы предельного значения угла еС поворота значение сигнала U на выходе датчика угла превышает пороговое значение U и с выхода порогового устройства 8 на первый вход блока 9 совпадения поступает сигнал Vgf а на его второй вход - выходной ,сигнал Uj, предварительного усилителя 2. Ъ результате этого сигнал Uj с выхода блока 9 совпадения поступает на вход сргласующего устройства Ю, которое, в свою очередь, меняет на своем выходе знак сигнала U на противоположный. Полученный сигнал 5 поступая на управляющие входы ключей 11 и 12, переводит первый ключ 11 в закрытое состояние, а второй ключ 12 - в открытое и сигнал U с выхода датчика скорости через усилитель 3 мощности интенсивно тормозит исполнительный двигатель 4.
Таким образом, введение согласующего ycTpqipcTBa, состоящего из первого и второго сумматоров и нелинейного преобразователя, двухпозиционного релейного блока, позволило реализовать в следящей системе переходные процессы, близкие к оптимальным по быстродействию, что выгодно 0 отличает предлагаемую следящую систе,му от известной. Моделирование на АВМ МН-18 известной и предлагаемой следящих систем подтверя(дает повышение быстродействия и динами5 ческой точности предлагаемой системы на 15-20% относительно известной.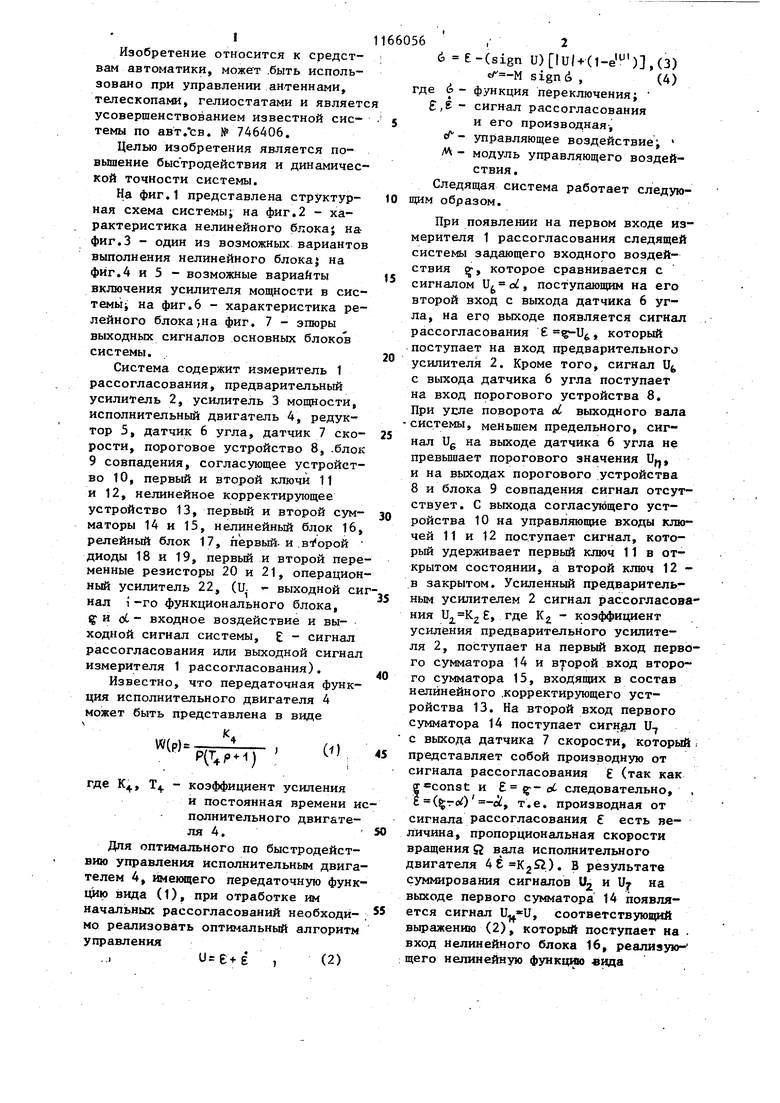

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU746406A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Следящая система | 1977 |
|
SU734610A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Следящая система | 1983 |
|
SU1105858A1 |
| Следящая система | 1987 |
|
SU1499315A1 |
| Следящая система | 1976 |
|
SU611177A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |


СЛЕДЯЩАЯ СИСТЕМА по авт.св. 9 746406 отличающаяся тем, что, с цельюповмпения быстродействия и динами«{еской точности системы, в ней дополнительно установлены релейный блок, первый и второй сумматоры и нелинейный блок, причем выход предварительного усилителя соединен с Сигнальным входом первого ключа через последовательно соединенные первый сумматор, нелинейный блок, второй сумматор и ре- Лейный блок, первый вход первого сумматора подключен к второму входу второго сумматора, а второй вход к выходу датчика скорости.
18
22 ts
19
Фиг.
и.
ft
и,
п
П
л
12
и,
to
f(9. Г4 KS/i f,e
ФигЛ
Г2
KS/IJ4
.KS.ftd
Фиг.5
//.Ы
Фиг.6
| Следящая система | 1978 |
|
SU746406A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
