Изобретение относится к устройствам коррекции систем автоматического регулирования с тахометрической обратной связью.
В частности, к системам автоматического регулирования с тахометрической связью, содержащим устройства для отработки за минимальное время угла и скорости в режиме приема целеуказания.
Изобретение может быть использовано в радиотехнике, приборостроении и станкостроении.
Известна следящая система, авт. св. №328424, 1972 г., предназначенная для отработки ступенчатых воздействий любой величины, которая является оптимальной по быстродействию, но обладает недопустимой сложностью, поскольку в нее входят 4 мультивибратора, блок селектора с 5 входами и ключ. "Цифровая следящая система", авт. св. №438984, 1975 г. и "Следящая система", авт. св. №482716, 1976 г. предназначены для отработки без перерегулирований ступенчатых воздействий, превышающих линейную зону системы, выполнены по одному и тому же принципу исключения (ограничения) сигнала тахометрической связи и отличаются несколько меньшей сложностью. Известно также "Управляющее устройство", авт. св. №249447, 1970 г., которое теоретически предназначено для коррекции систем регулирования более широкого класса воздействий, но имеет структурные ограничения и в части реализации. Все перечисленные устройства достаточно сложны и не могут быть выбраны в качестве прототипа. Известны простые нелинейные устройства коррекции: Честнат Г. и др. "Проектирование и расчет следящих систем и систем регулирования". М-Л., 1959 г., ч.11, с.370; авт. св. СССР №525051; но в них речь идет об уменьшении перерегулирований в переходном процессе, но неоптимальном управлении.
Вышеперечисленные устройства сложны для применения в подвижных комплексах и не решают поставленную задачу приема целеуказания /ЦУ/, т.е. переброса антенны с целью захвата и сопровождения движущейся цели, для чего система должна за кратчайшее время отработать ступенчатые воздействия угла и скорости, поступающие на ее вход одновременно.
Известно устройство-прототип "Следящая система" изделия "ОСА-АК" (Техническое описание изделия "ОСА-АК", НИЭМИ, г.Москва, 1975 г.), структурная схема которой представлена на фиг.2. Система, кроме обычных элементов следящих систем, содержит устройство выработки сигнала ЦУ1, электронный переключатель уровня 12, первый вход которого предназначен для выставки уровня срабатывания, второй - для управления с помощью сигнала тахогенератора 9. Принцип действия системы при отработке больших рассогласований без перерегулирований основан на использовании естественного ограничения сигналов на выходе усилителей 5-7, тахогенератора 9 и переключении специально выбранных делителей сигналов ошибки 13 и тахо 10, что при достаточно больших коэффициентах усиления разомкнутых внешнего и внутреннего контуров (это всегда выполняется в следящих системах точного сопровождения цели) позволяет осуществить практически релейный характер изменения момента двигателя при разгоне и торможении нагрузки. Для режима "Переброс" делитель тахосвязи выбирается так, чтобы максимальный уровень ее на входе суммирующего усилителя 6 приблизительно равнялся максимальному уровню выходного сигнала усилителя корректирующего сигнала 5, а делитель сигнала ошибки 13 устанавливает соответствие между максимальным сигналом усилителя корректирующего сигнала 5 и рассогласованием в системе, равным углу выбега ее при интенсивном торможении (торможении с максимальной скорости, при действии максимального тормозного момента двигателя). Из изложенного следует обоснование отработки устройством-прототипом и устройствами-аналогами без перерегулирований сколь угодно больших ("в большом") ступенчатых воздействий.
Работа происходит следующим образом. При поступлении сигнала с блока 1 и достижении при разгоне "граничной" (малой скорости) сигнал с тахо 9 через устройство ввода 11 вызывает срабатывание переключателя 12, включая второй позицией делители "Переброс", что подготавливает систему к режиму торможения (не влияя на разгон). При достижении рассогласования в системе, равного тормозному пути, происходит переключение момента двигателя. При уменьшении скорости переключатель отпускает и своей первой позицией включает делители точного сопровождения.
Однако недостатком устройства-прототипа является затянутость переходных процессов при отработке ступенчатых воздействий "в малом" и, в особенности, колебательность при отработке совместно поступающих на вход ступенек угла и скорости при приеме целеуказания, что приводит к снижению быстродействия. Наибольшие трудности выявляются при перебросе и захвате цели, движущейся навстречу перебрасываемой антенне, поскольку за время торможения (установленного в системе-прототипе исходя из неподвижной цели) цель приближается к пеленгу антенны, и тормозной путь реализуется за счет перерегулирования, после чего происходит реверс скорости. Кроме того, быстродействие снижается за счет большой скоростной составляющей ошибки в этом режиме.
Таким образом, целью изобретения является повышение быстродействия системы при приеме целеуказания.
Поставленная цель достигается тем, что в следящую систему введены нелинейный преобразователь сигнала рассогласования 3 и сумматор 4, один из входов которого подключен к выходу скорости устройства цела указания 1, а второй - к выходу нелинейного преобразователя, вход которого соединен с выходом измерителя рассогласования, причем выход сумматора подключен ко входу усилителя корректирующего сигнала. Изобретение будет понятно из следующего описания и приложенных к нему чертежей.
Структурные схемы устройства-прототипа и предлагаемого устройства - фиг.1 и 2.
На фиг.3 приведены функции коррекции сигнала рассогласования (мв) в зависимости от рассогласования в системе (ду), 1 - для системы-прототипа, 2 - для нелинейного преобразователя, 5 - для нелинейного преобразователя совместно с усилителем корректирующего сигнала предлагаемой системы, 4 - для режима точного сопровождения цели.
На фиг.4 приведены функции времени переброса (приема ЦУ при вхождении в трубку ±16,6 ду) в зависимости от начального рассогласования системы (ду), полученные путем моделирования на БЭСМ-6:
1 - системы-прототипа на неподвижную цель;
2 - предлагаемой системы на неподвижную цель;
3 - предлагаемой системы на удаляющуюся цель со скоростью

4 - одна реализация реакции системы-прототипа на приближающуюся цель со скоростью 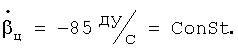
5 - предлагаемой системы на приближающуюся цель со скоростью
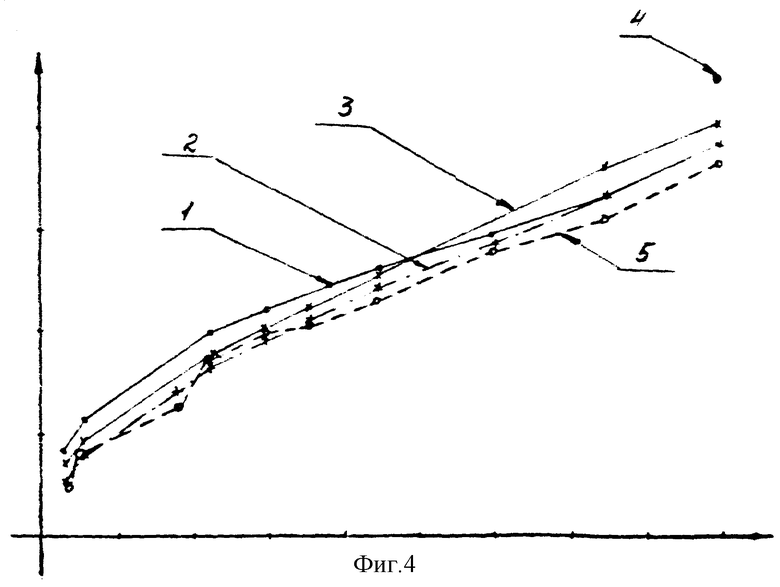
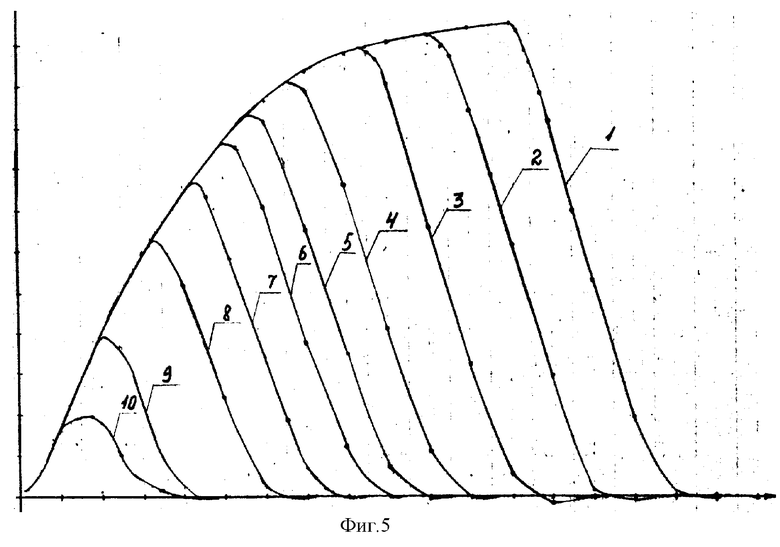
Переходные функции предложенного устройства по скорости (I дел = 100 ду/с) в зависимости от времени (I дел = 0,25 с) приведены на фиг.5 при неподвижной цели и начальных рассогласованиях: 1-3000 ду, 2-2500 ду, 3-2000 ду, 4-1500 ду, 5-1200 ду, 6-1000 ду, 7-750 ду, 8-500 ду, 9-200 ду, 10-100 ду, а на фиг.6 - при движущейся цели навстречу и вдогон при постоянной скорости движения цели, равной ±85 ду/сек.
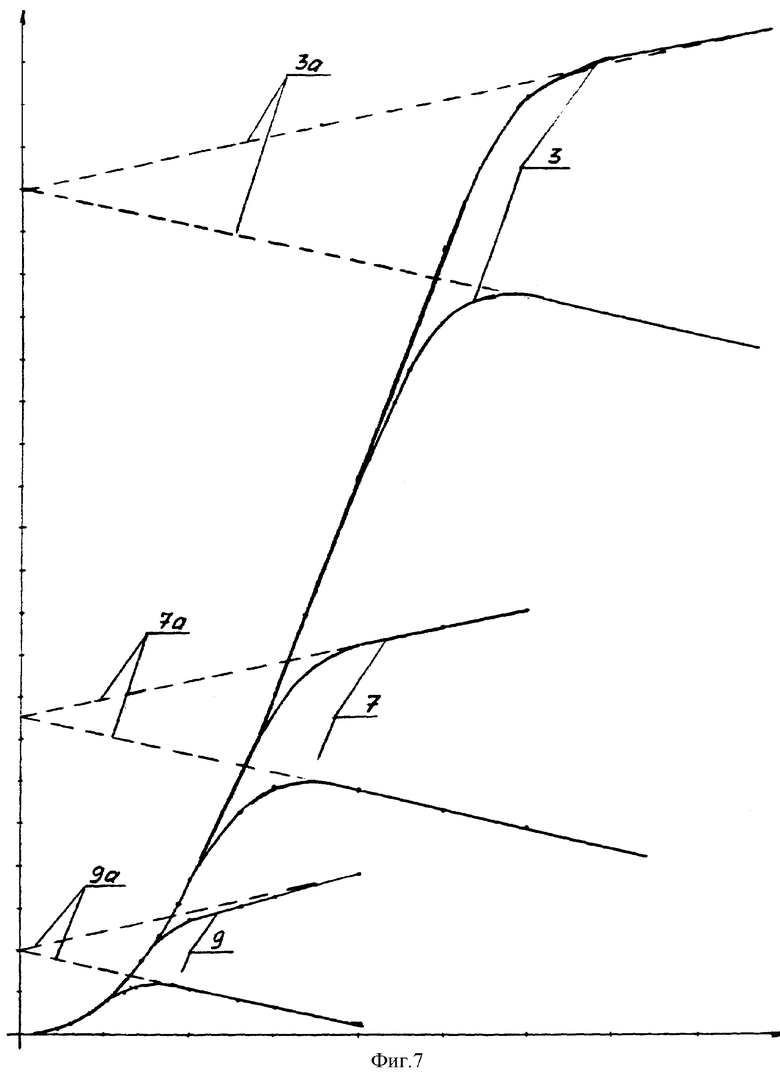
На фиг.7 приведены переходные функции 3, 7, 9 угла системы при отработке устройством ступенек 3а, 7а, 9а угла и скорости, действующих одновременно.
На фиг.1, 2 и в тексте приняты следующие обозначения:
1. Устройство целеуказания (ЦУ),
2. Измеритель рассогласования,
3. Нелинейный преобразователь,
4. Сумматор скорости цели,
5. Усилитель корректирующего сигнала,
6. Усилитель суммирования,
7. Усилитель постоянного тока,
8. Исполнительное устройство, включающее усилитель мощности, двигатель, редуктор,
9. Тахогенератор,
10. Делитель напряжения тахо сигнала "Прием ЦУ" (на фиг.1 - делители "Переброс" - "Точное сопровождение"),
11. Устройство ввода,
12. Электронный переключатель уровня,
13. Делители "Переброс" - "Точное сопровождение" (фиг.1).
Предлагаемое устройство состоит из: устройства 1 целеуказания, в котором на первом выходе образуется экстраполированный сигнал проекции (β или ε) углового положения цели, а на втором выходе - угловой скорости цели, измерителя рассогласования 2 следящей системы, корректора, состоящего из нелинейного преобразователя сигнала рассогласования 3 и сумматора скорости цели 4. Нелинейный преобразователь формирует функцию (фиг.3, ломаная 2) с двумя значениями крутизны, причем начальный участок имеет большую крутизну, которая совместно с коэффициентом сигнала скорости цели устанавливается расчетно-экспериментальным путем, исходя из условия отсутствия перерегулирований при приеме ЦУ подвижных целей с малыми начальными рассогласованиями. В устройство также входят: усилитель корректирующего сигнала постоянного тока 5, суммирующий усилитель 6 разности сигналов, корректирующего и с выхода делителя "Прием ЦУ" 10, запитываемого от тахогенератора 9, который присоединен к валу исполнительного двигателя устройства 8. Делитель сигнала тахо в режиме ЦУ выбирается из условия приблизительного равенства максимальных значений этого сигнала и сигнала с выхода усилителя 5. Усилитель постоянного тока 7 управляет исполнительным устройством 8 следящей системы.
Устройство работает следующим образом. При срабатывании устройства целеуказания 1 с его выхода сигнал угла цели поступает на вход измерителя рассогласования системы 2, где сравнивается с сигналом угла антенны, а разность поступает на соединенные последовательно нелинейный преобразователь 3, сумматор 4 скорости цели и через последовательную цепь усилителей корректирующего сигнала 5, суммирования 6, тока 7 - на управляющий вход исполнительного устройства 8, которое осуществляет поворот (разгон) антенны в направлении на цель. В ситуации, когда разностный сигнал на входе суммирующего усилителя 6 исчезает, а через малое время (через 1/20 с), в силу уменьшения рассогласования, происходящего за счет инерции системы и поддержания на прежнем уровне тахосигнала с делителя 10 и в связи с неизменностью скорости привода, - разностный сигнал (вращающий момент двигателя) изменяет знак на обратный, переводя, тем самым, следящую систему в режим торможения, который характеризуется интенсивным уменьшением скорости, происходящим практически по линейному закону (см. фиг.6) до величины скорости цели.
Использование изобретения позволит повысить быстродействие и точность системы при приеме целеуказания и, в конечном счете, - уменьшить работное время комплекса.
По данному техническому предложению на предприятии изготовлен экспериментальный макет системы, создана математическая модель системы, которая запрограммирована на языке Алгол БЭСМ-6 с учетом люфтов, податливости, сухого и вязкого трения редуктора и реальных ограничений сигналов всех элементов прямого и обратного каналов системы, а также имеющихся в системе местных обратных связей по току и напряжению.
Проводились расчеты по определению параметров оптимальных переходных процессов системы при работе по неподвижной и движущейся целям, определялись энергетические соотношения привода, время и путь разгона (торможения) следящей системы-прототипа и предлагаемой системы. Результаты расчетов достаточно совпали с подученными на БЭСМ-6.
Были проведены испытания экспериментального макета системы, построенного по схеме прототипа и предлагаемой системы, на БЭСМ-6. Результаты приведены на фиг.4, который показывает, что при отработке ступенек углов 2500-3000 ду (кривые 1 и 2) обе системы, естественно, имеют оптимальный переходный процесс (максимальное быстродействие), а при уменьшении входного сигнала в системе-прототипе появляется затянутость в переходных процессах, в то время, как в предлагаемой системе характер переходного процесса практически не изменяется, и выигрыш в быстродействии составляет при ступеньке 1500 ду - 5%, ступеньке 200 ду - 40%. При работе по движущейся цели (фиг.4, точка 4 и соответствующее значение кривой 5) с начальным рассогласованием 3000 ду быстродействие возрастает на 25%. Значение полученного результата можно оценить из того факта, что стремление увеличить быстродействие в предлагаемой системе относительно системы - прототипа на 30% потребовало разработки и поставки на серийное производство новых ЭМУ и двигателя постоянного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU734610A1 |
| Следящая система | 1977 |
|
SU703776A1 |
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| Следящая система | 1977 |
|
SU661501A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1978 |
|
SU744433A1 |
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Следящая система | 1979 |
|
SU788076A1 |


Изобретение относится к области автоматики, в частности к устройствам коррекции систем автоматического регулирования с тахометрической обратной связью. Техническим результатом является повышение быстродействия. Система содержит блок целеуказания, блок сравнения, исполнительный орган, тахогенератор, делитель напряжения, два сумматора, первый усилитель, усилитель постоянного тока и нелинейный преобразователь. 7 ил.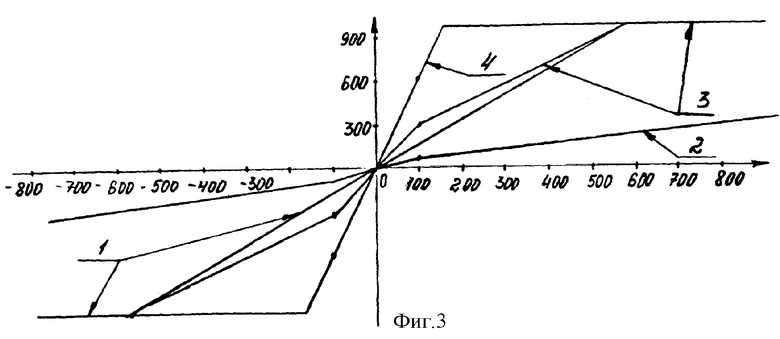
Следящая система, содержащая блок целеуказания, первый выход которого подключен к первому входу блока сравнения, второй вход которого подключен к выходу исполнительного органа, соединенному также через тахогенератор с входом делителя напряжения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с выходом первого усилителя, а выход через усилитель постоянного тока соединен с входом исполнительного органа, отличающаяся тем, что, с целью повышения быстродействия, она содержит нелинейный преобразователь и второй сумматор, выход которого подключен к входу первого усилителя, первый вход через нелинейный преобразователь соединен с выходом блока сравнения, а второй вход соединен с вторым выходом блока целеуказания.
| Источники информации, принятые во внимание при экспертизе изобретения: | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система с нелинейной коррекцией | 1974 |
|
SU525051A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание изделия "ОСА-АК", НИЭМИ, Москва, 1975 г | |||
| - прототип. | |||

