1
Изобретение относится к области адаптивных систем с переменной структурой и может быть использоваяб для управления объектами, параметры которых меняются в широком диапазоне. Требуемое качество регулирования в этих условиях достигается за счет адаптации параметров регулятора к изменяющимся параметрам объекта и условиям внешней среды.
Известны адаптивные регуляторы с переменной структурой, имеющие основной канал регулирования, содержащий параллельно включенные дифференциатор и первый интегратор, выходы которых подключены к первому и второму входам nepiBoro сумматора, а входы - к третьему его входу и входу регулятора; выход первого сумматора подключен .к первому входу множительного устройства, выход которого является выходом регулятора; и канал настройки коэффициента усиления регулятора, содержащий два блока выделения модуля, выходы которых через последовательно соединенные :второй сумматор и второй интегратор подключены ко входу множительного устройства.
Однако известные адаптивные регуляторы не обеспечивают требуемого качества регулирования при управлении объектами с переменными параметрами и при изменении условий внешней среды.
Целью изобретения является улучшение качества регулирования при изменении условий внешней среды и при управлении объектами с переменными парамет1рами. Поставленная цель достигается тем, что .канал настройки коэффициента усиления регулятора содержит два логических устройства, первые входы кбторых подключены ко входу регулятора, вторые входы - к соответствующим выходам дифференциатора, а выходы подключены ко входу соответствующего блока выделения модуля.
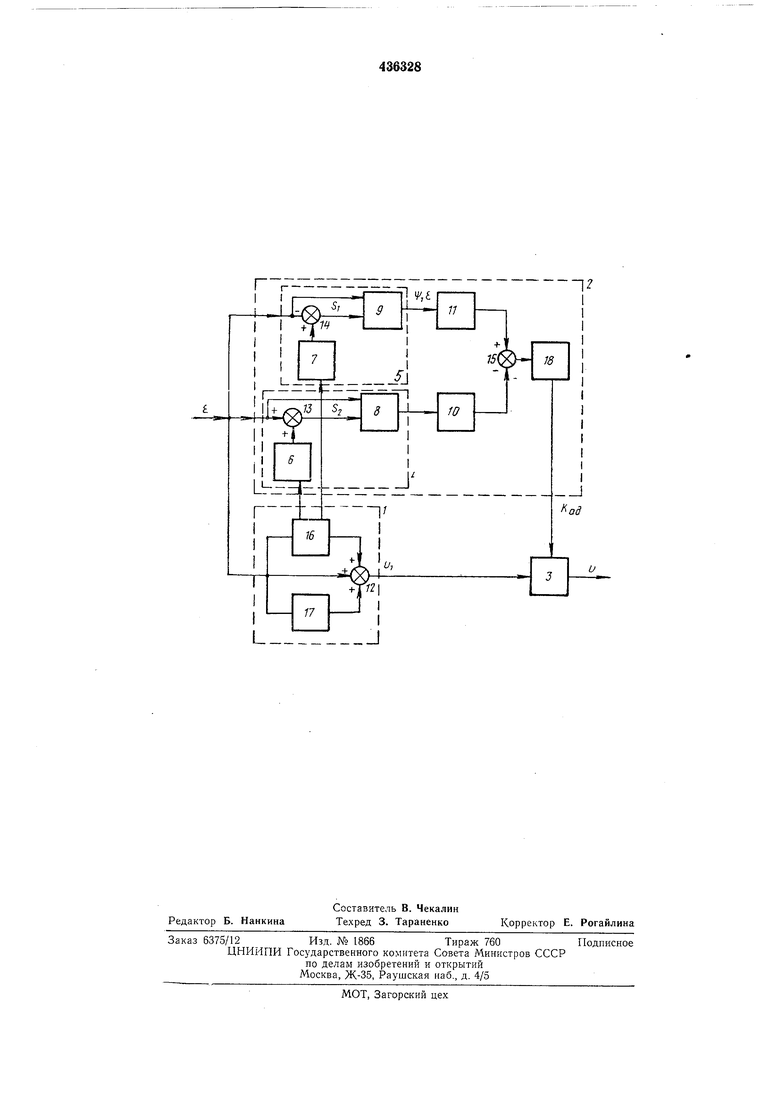
На чертеже представлена блок-схема регу лятора, где: 1 - основной канал регулирования; 2 - канал настройки коэффициента усиления регулятора; 3 - множительное устройство; 4, 5 - логические устройства; 6,7 - пропорциональные блоки; 8, 9 - логические блоки; 10, 11 - блоки выделения модуля;12, 13, 14, 15 - сумматоры; 16 - дифференциатор; 17, 18 - интеграторы.
Работает регулятор следующим образом.
В основном канале регулирования 1 реализуется следующий закон управления:
t t/, (О е+ (леЧ- M 2jecf/,(1)
где е - входной сигнал регулятора, являющийся сигналом ошибки регулирования; |.iie- 30 выходной сигнал дифференциатора 16;
Ц2 edt - выходной сигнал интегратора 17.
о
Выходной сигнал регулятора U(t) формируется множительным устройством 3, на входы которого поступает сигнал основного канала 1 Ui{t) и сигнал канала настройки .коэффициента усиления/Сад (ОСигнал, определяюнд.ий коэффициент усиления регулятора, формируется в канале 2 следующим образом:
/Сад (О ад(0) +J(a|Vi (е,5,) 2 (е, Sa) е|) dt, К,, (t) 0, (2) где а, |3 - параметры настройки; /Сад (0) - значение выходного сигнала интегратора 18 в момент пуска регулятора.
Логические устройства 5 и 4 формируют выходные сигналы:
I j е5,0
fO
где 5i, 2 - уравнения прямых переключенийВфазчтестм йространстве (е, е), проходяЩих чере з,началу координат, .причем коэффициент при производной в уравнениях положителен.
Выходные сигналы с устройств 4, 5 поступают на блоки выделения модулей 10, П. Сигналы с блоков 10, 11 через последовательно соединенные сумматор 15 и интегратор 18, поступают на второй вход множительного устройства 3, изменяя коэффициент усиления регулятора.
Регулятор с законом управления, определяемым формулами (1) - (4), целесообразно использовать для управления промышленными объектами, характеризующимися наличием инерционностей и запаздывания, причем параметры объекта: Кое, -коэффидиент передачи; т - постоянная запаздывания; Т - постоянная времени в процессе регулирования могут меняться в широких диапазонах.
Изменение параметров объекта приводит к двум случаям: 1) переходные процессы становятся колебательныМИ, колебательно-неустойчивыми; 2) .переходные процессы становятся апериодическими, настолько медленными, что перестают удовлетворять требованиям па качество переходного процесса.
В первом случае сигнал /Сад t, формируемый каналом настройки 2, пачинает уменьшаться за счет того,- что входной сигнал интегратора 18 отрицателен, т. к. в силу определенных
соотношений между аир при колебательных процессах выходной сигнал блока 10 больше выходного сигнала блока 11. Уменьшение /Сад (О приводит к уменьшению общего коэффициента контура регулирования и повышению устойчивости.
Во втором случае выходной сигнал, формируемый каналом настройки 2, начинает увеличиваться, так как при затянутых апериодических процессах и тех же соотношениях между а и ,р, что и в предыдуших случаях, выходной сигнал блока II существенно больше выходного сигнала блока 10. При этом коэффициент усиления возрастает и тем самым улучшаются переходные процессы, становятся более быстрыми.
Непрерывное изменение /Сад (О в предлагаемом адаптивном регуляторе с пере.менной структурой исключает возможность возникновения скользящих движений, что существенным образом сказывается па динамике и ха(3) (4) рактере процессов регулирования. Новый принцип, используемый в предлагаемом регуляторе, позволяет осуществить адаптацию параметров регулятора к изменяющимся параметрам объекта произвольного порядка, используя информацию лишь о выходной .координате и о производной, что ранее представлялось невозможным.
Предмет изобретения
Адаптивный регулятор с переменной структурой, имеющий основной канал регулирования, содержащий параллельно включенные дифференциатор и цервый интегратор,.выходы которых подключены к первому и второму входам первого сумматора, а входы - к третьему его входу и входу регулятора, выход
первого сумматора подключен к первому входу множительного устройства, выход которого является выходом регулятора, и канал настройки .коэффициента усиления регулятора, содержащий два блока выделения модуля,
выходы которых через последовательно соединенные второй сумматор и второй интегратор подключены ко второму входу множительного устройства, отличающийся тем, что, с целью улучшения качества регулирования при изменении параметров объекта и условий внешней среды, канал настройки коэффициента усиления регулятора содержит два логических устройства, первые входы которых подключены ко входу регулятора, вторые входы - к соответствующим выходам дифференциатора, а выходы подключены ко входу соответствующего блока выделения модуля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Адаптивный регулятор | 1984 |
|
SU1149213A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU451983A1 |
| Автомат-настройщик двухконтурных систем регулирования с опережающим сигналом | 1987 |
|
SU1624245A1 |
| Бинарная система управления | 1988 |
|
SU1697054A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |