i
Изобретение относится к азтома-TJwecKOMy регулированию и может быт использовано в системах управления тйхнологическишг процессами и переменными параметрами, например в системах управления процессами стерилизации пищевых продуктов.
Известен адаптивньй регулятор, реализующий прОпорцяонально-йнтегральный закон регулирования с перестраиваемыми в зависимости от характеристик переходного процесса настройками регулятора Л ,
Недостатком этого регулятора является низкая точность регулирования S условиях помех.
Наиболее близким к предлагаемому является адаптивный регулятор, содержащий задатчик, входной сзпчкатор подключенный первым входом к выходу объекта регулирования, а вторым входом - к выходу задатчика,, первое и второе множительные устройства,первые входы которых подключены к выходу входного сумматора, первый усилитель и интегратор, подключенные входами к выходам соответственно первого и второго множителькьзх устройств, и выходной сумматор входы которого подключены соответственно к выходам .первого усилителя и интегратора, а выход - к входу объек-га. Настройка коэффициентов при прокорцнопальной и интегральной составляющих закона управления осуществляется на основе обработки информа5л;5ж о ре зкции системы на пробиый сигнал .
Недостатком известного регулятора является сложность реализации, связанная с используемым способом оценки параметров объекта, предусматривающим наличие генератора пробного сигнала, дифференцирующего устройства и логических устройств нахоадения абсолютного и максимального значений функций. Кроме того, при наличии помех уменьшается точность регулятора, что связано с использованием дифференциатора и логических устройств.
Целью изобретения является повышение точности адаптивного регулятора в условиях помех и упрощение технической реализации при известных зависимостях между параметрами установившегося режима
132
регулирования и параметрами передаточной функции объекта.
Эта цель достигается тем, что адаптивный регулятор, содержапцШ задатчик, входной сумматор, подключенный первым входом к выходу объекта регулирования, а вторым входом - к выходу задатчика, первое и второе множительные устройства, первые входы которых подключены к выходу входного cjT aTOpa, первый усилитель и интегратор, подключенные входами к выходам соответственно первого и второго
множительных устройств, и выходной сумматор, входы которого подключены соответственно к выходам первого усилителя и интегратора, а выход к входу объекта, дополнительно содержит низкочастотный фильтр, первое и второе статические нелинейные звенья, первое и второе делительные устройства и второй усилитель, причем выход выходного сумматора через последовательно соединенные низкочастотный фильтр и первое статическое нелинейное звено ; соединен с первьм входом первого делительного устройства, второй вход которого соединен с выходом задатчика и входом второго статического нелинейного звена, выход первого делительного устройства подключен к входу второго усилителя и первому входу второго делительного устройства, вьпсоды которых под1спючены соответственно к вторым входам первого и второго множительных
устройств, второй вход второго нелинейного делительного устройства соединен с выходом второго статического звена.
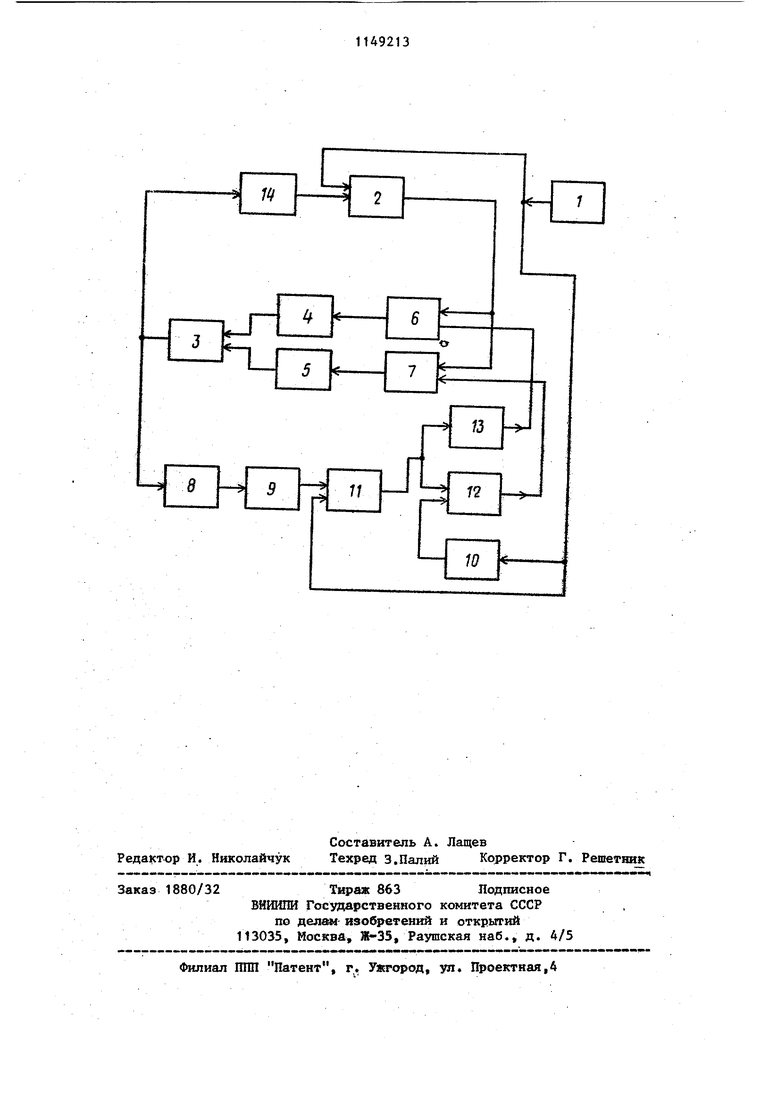
На чертеже представлена функциональная схема предлагаемого адаптивкого регулятора.
Регулятор содержит задатчик 1, входной 2 и выходной 3 сумматоры, первый усилитель 4, интегратор 5, первое 6 и второе 7 множительные
устройства, низкочастотный фильтр 8, первое 9 и второе 10 статические нелинейные звенья, первое 11 и второе 12 делительные устройства и второй усилитель 13.
Выходы объекта 14 регулирования . и задатчика 1 соединены с входом сумматора 2, выход которого соединен с первыми входами первого 6 и второго 7 множительных устройств, выходы которых соответственно чере первый усилитель 4 и интегратор 5 подключены к входам выходного сумматора 3, выход которого подключен к входу объекта 14 и через последо вательно соедьненные низкочастотный фильтр 8 и первое статическое нели нейное звено 9 соединен с первым входом первого делительного устройства 11, второй вход которого соединен с выходом задатчика 1. Выход первого делительного устройства 11 подключен к входу второго усилителя 13 и первому входу второго делительного устройства 12. Выход задатчика 1 через второе статическое нелинейное звено 10 подключен к второму входу второго делительного устройства 12. Выходы второго усилителя 13 и второго делительного устройства 12 подключены соответственно к вторым входам первого 6 и второго 7 множительных устройств. Адаптивный регулятор предназначен для управления объектами, описы ваемыми передаточной функцией -рь причем таких, что время заТр + паздывания с и постоянная времени Т изменяются пропорционально, Т т.е. - const. Оценка двух параметров объекта, а именно постоянной времени и коэффициента усиления К, дает необходимую информацию для настройки регулятора, В отличие от способа оценки параметров объекта в известном адаптивном регуляторе, основанном на обработке информации о переходном процессе, предлагается оценивать параметры по входному и выходному сигналам объекта в устано вившемся режиме. Оценка коэффициент усиления объекта К осуществляется на основе статической характеристики объекта ст Д чст J
-установившийся входной
и
уст сигнал объекта jl
-установившийся выходной
1{СТ сигнал объекта, равный 55 сигналу с задатчика х,
f - известная для объекта
статическая нелинейность;
2 .L
Ч 472
2Т К|, - коэффициент при пропорциональной составляющей закона регулирования; K, - коэффициент при интегральной составляющей. с - параметр, зависящий от параметров технологического процесса. Коэффициент усиления объекта представляет производную установившегося выходного сигнала по установившемуся Е-ходному сигналу. K.bfl-,(1) auycr т.с, у тятьшая вьфажение (t) 1/ ДиустГ i,Uyol Пицс, Щ з) На основе формулы (2) осуществляется оценка коэффициента усиления К. Оценку постоянной времени объекта предлагается ощ)еделять по уровню установившегося выходного сигнала объекта, равного сигналу с задатчика. Для многих промышленных объектов, в частности для автоклавов, известна зависимость постоянной времени от установившегося выходного сигнала T ClUycr). :(4) Эта зависш ость реализуется в предлагаемом устройстве. По оценкам постоянной времени и коэффициента усиления осуществляется настройка коэффициентов регулятора. Алгоритм настройки основан на принципе достижения в системе степени устойчивости, близкой к максимальной при управлении объектом, описываемым передаточной функцией . . Как известно з , максимальная степень устойчивости достигается при (T«r-2Tr-tI + 0 i Чти111 к„1;
При отнонгении - 1 формулы (5)
t
с достаточной точностью аппроксимируются упрощенными выражениями
О,-54 т 0./Т
к,-.
ТГ1тЬ (7)
1)
которые реализзтотся в предлагаемом способе.
Адаптивный регулятор работает следузощим образом.
Устройство состоит из контура регулирования и контура оптимальной настройки. В контуре регулирования, состоящем из входного сз мматора 2, двух множительных устройств 6 и 7, первого усилителя 4, интегратора 5 и выходного сум $атора 3, реализуется пропорционально-интегральный закон регулирования. По сигналу ошибки регулирования, получаемой на выходе входного сумматора 2 как разность сигналов с объекта 14 и задатчика 1, на выходе первого усилителя 4 формируется сигнал, пропорциональной составляющей закона регулирования, а на выходе интегратора 5 - сигнал интегральной Составляющей. Сумма этих сигналов с выхода выходного сумматора 3 подается на вход объекта 14. Множительные устройства 6 и 7 используются для ввода в контур регулирования коэффициентов пропорциональной и интегральной составляющих, формируемых в контуре оптимальных настроек коэффициентов регулятора. Выходной сигнал первого множительного устройства 6 представляет собой произведение входных сигналов ошибки регулирования и коэффициента пропорциональной составляющей, а выходной сигнал второго множительного устройства 7 - произведение сигналов ошибки регулирования и коэффициента интегральной составляющей.
Контур оптимальной настройки состоит из низкочастотного фильтра 8, двух статических нелинейных звеньев 9 и 10, двух делительных устройств 11 и 12 и второго усилителя 13. Первое статическое нелинейное
звено 9 реализует функцию f (3),причем входным.сигналом его является пропущен шй через низкочастотный фильтр 8 выходной сигнал выходного 5 сумматора 3. Входными сигналами первого делительного устройства 11 являются сигнал с задатчика 1, характеризующий установившийся выходной сигнал объекта, и выходной сигнал первого статического нелинейного звена 9, причем для удобства настройки первый сигнал поступает на делительный вход, а второй на множительный вход, т.е. выходной сигнал представляет собой оценку величины, обратной коэффициенту усиления объекта.
Второе статическое нелинейное звено 10 реализует формулу (4).
0 Коэффициент К (6) представляет собой выходной сигнал второго усилителя 13, собственный коэффициент усиления которого реализуется в зависимости от отношения
5 rj,
у Входным сигналом второго усилителя 13 является выходной сигнал первого делительного устройства 11, являющийся оценкой обратной величины коэффициента усиления объекта К.
Коэффициент настройки К у (7) представляет co6ofi выходной сигнал второго делительного устройства 12, осуществляющего деление сигнала с
5 задатчика 1 на сигнал с первого делительного устройства 11.
Коэффициенты настроек К„ и Кц вводятся в контур регулирования температуры с помощью первого б и второго 7 множительных устройств.
Использование способа оценки параметров объекта, связанного с реализацией известных для ряда
5 технологических процессов зависимостей между параметрами объекта и параметрами установившегося процесса, должно привести к существенному упрощению контура настройки, а осуществление оптимальных настроек по формулам (6) и (7) - к повышению точности адаптивного регулятора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| Устройство для регулирования температуры в камере высокого давления | 1981 |
|
SU1008712A1 |
| Бинарная система управления | 1988 |
|
SU1697054A1 |
| Нелинейный адаптивный регулятор | 1983 |
|
SU1187148A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
| Система автоматического регулирования давления пара в магистрали барабанного котла | 2019 |
|
RU2746377C1 |
АДАПТИВНЫЙ РЕГУЛЯТОР, содержащий задатчик, входной сумматор, подключенный первым входом к выходу объекта регулирования, а вторым входом - к вьЬсоду задатчика, первое и второе множительные устройства, первые входы которых подключены к выходу входного сумматора, первый усилитель и интегратор, nofj,кпюченные входами к выходам соответственно первого и второго множительных устройств, и выходной сумматор, входы которого подключены соответственно к выходам первого усилителя и интегратора, а выход к входу объекта, отличающийс я тем, ЧТО, с целью повышения ТОЧНОСТИ и качества адаптации в условиях помех и упрощения технической реализации регулятора, он дополнительно содержит низкочастотный фильтр, первое и второе статические нелинейные звенья, перво« и второе делительные устройства и второй усилитель, причем выхрд выходного сумматора через последовательно соединенные низкочастотный фильтр и первое статическое нелинейное звено соединен с первым входом первого делительного устройства, второй вход которого соединен с выходом задатчика и входом второго статического нелинейного звена, выход первого делительного устройства подключен к входу второго усилителя и первому. 4 СО входу второго делительного устройства второй вход которого соединен с ю выходом второго статического нелинейного звена, выходы второго усиW лителя и второго делительного устройства подключены соответственно к вторым входам первого и второго множительных устройств,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АДАПТИВНЫЙ ИМПУЛЬСНЫЙ ПРОПОРЦИОНАЛЬНС ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОРп<?п**;,.«, | 1972 |
|
SU432459A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способы систем управления максимальной степени УСТОЙЧИВОСТИ | |||
| - Автоматика и теле,механика, 1980, № 1 | |||
