Изобретение относится к системам автоматического управления и может быть использовано для автоматического регулирования промьшленных, в част кости, нефтеперерабатывающих и нефте- химических объектов, характеризующихся наличием запаздывания и инерционности, изменяющихся в определенном диапазоне.
Цель изобретения - повьшение точное- ти.
На чер.теже изображена структурная схема регулятора.
Регулятор содержит первый 1, вто- рой 2 и третий 3 сумматоры, диффе- ренциатор 4, интегратор 5, блок умножения 6, блок изменения структуры 7, блок определения модуля 8, фильтр 9 с переменной структурой, усилитель 10 с переменной структурой, источник 11 постоянного напряжения.
Регулятор реализует закон управления
U(t) (K K(t)),({)+ Tj (t) +
I
+ -f- I (0) dSl . K(t), (1)
Kn и К,
где (t) - ошибка регулирования, равная x(t)-x(t); x(t) их(1) - регулируемая выходная
координата и задание; t - время;
0 - переменная интегрирования J W - соответственно постоянная и автоматически изменяемая часть коэффициента усиления регулятора;
Т- и Т - соответственно постоянная времени дифференцирования и интегрирования. Регулятор работает следукщим образом.
Регулируемый выходной сигнал объ- екта x(t) и х поступают на соответствующие (минусовой и плюсовой) входы сумматора 1, выходной сигнал которого поступает на входы интегратора 5, дифференциатора 4 и на пер- вые входы сумматора 2 и блока изменения структуры 7. Выходной сигнал сумма
. . -
(i))T; j(e)de
, о. .
то-ра 2 поступает на первый вход блока умножения 6, на втЬрой вход кото- ,р6го поступает выходной сигнал 1С +
+ Ko(t) контура адаптации. На выходе блока умножения 6 формируется выходной сигнал регулятора U(t). Выходной сигнал дифференциатора 4 поступает на вход блока определения модуля 8 и на второй вход блока изменения структуры 7.
В контуре адаптации на основе сигналов f и формируется автоматически изменяемый коэффициент усиления регулятора по алгоритму
Kp(t) Kn+Ka(t),
K.(t) ч(,П| (t) ,
(2)
)
Ч при О
гг
. О при О,
Ч const.
(3)
который реализуется с помощью блоков изменения структуры 7 и усили- ( теля с переменной структурой 10.
Максимальное знач.ение модуля реальной производной ) I формируется на основе выходного сигнала t I блока определения модуля 8 в фильтре 9 по алгоритму
Т -- IU + 1г1
dt
ГТ, .
Tj при1еК1 1 , т т. (4)
где Т и T,j - постоянные времени
фильтра.
Выходной сигнал дифференциатора 4 поступает на вход блока определе - ния модуля 8, на выходе которого формируется сигнал . Выходной сигнал блока 8 поступает на вход фильтра 9 с переменной структурой. При выбранном соотношении постоянных времени Т и Т фильтр 9 оценивает максимальные значения модуля производной по алгоритму (4) и на его выходе формируется выходной сигнал( I , который поступает на первый вход усилителя 10 с переменной структурой. На второй вход усилителя с переменной структурой подается выходной сигнал блока изменения структуры 7, который производит логическое умножение в фазовой плоскости (,f ). На основе выходного сигнала sign блока изменения структуры 7 в блоке 10 устанавливается коэффициент усиления равный либо У . (при
f- 6 0) , либо О (нулю) при 0. На входе усилителя 10 с переменной структурой формируется сигнал K(t) Ч () , поступающий на первый вход сумматора 3, на второй вход кото рого подается сигнал, соответствующий значению постоянной части коэффициента усиления Кр. На выходе сумматора 3 формируется автоматически изменяемый коэффициент усиления Kp(t) Кг, + о,() который поступает на второй вход блока умножения 6.основного контура регулятора.
Предложенный регулятор в системе автоматического регулирования париру- ет существенные изменения параметров объекта следующим образом. При увеличении постоянных времени передаточной функции объекта.переходной процесс в системе имеет апериодический характер. Фильтр переключается с Т . на Т, что уменьшает значение автоматически изменяемого коэффициента усиления регулятора и коэффициентов при дифференцировании и интегрирова- НИИ ошибки, следовательно исключается перерегулирование и уменьшается время регулирования переходного процесса. При уменьшении постоянных времени объекта, что соответствует коле- бательному переходному процессу, фильтр переключается с Т„ на Т , увеличивая значение адаптируемого коэффициента усиления и коэффициентов при дифференцировании и интегрировании ошибки. Но на отрезке переходного процесса, при котором О, блок изменения структуры выдает управляющую команду на усилитель с переменной структурой, на выходе которого сигнал скачком равняется нулю. На выходе сумматора формируется минимальное значение, соответствующее самой медленной динамике объекта. На отрезке переходного процесса, при котором 5 О, значения параметров регулятора увеличиваются с большой ско скоростью, и тем самым ошибка быстро стремится к нулю.
В результате такой работы регулятора уменьшается перерегулирование (в первом случае) и время регулирования (во втором случае).
Формула изобретения
«
Адаптивный регулятор, содержащий блок умножения, последовательно соединенные первый сумматор, дифференциатор j блок определения модуля и фильтр с переменной структурой, последовательно соединенные интегратор и второй сумматор, последовательно соединенные источник постоянного напряжения и третий сумматор, первый и второй входы блока изменения структуры соединены соответственно с вы- ;ходом первого сумматора и выходом дифференциатора, о тличающи с я тем, что, с целью повышения точности регулятора, он содержит усилитель с переменной структ фой, первый и второй входы которого соединены соответственно с выходом фильтра с переменной структурой и выходом 6jio- ка изменения структуры, а выход через третий сумматор - с первым входом блока умножения, второй вход которого подключен к выходу второго сумматора, соединенного вторым .вхо-г дом с выходом первого сумматора, а третьим выходом - с выходом дифференциатора. 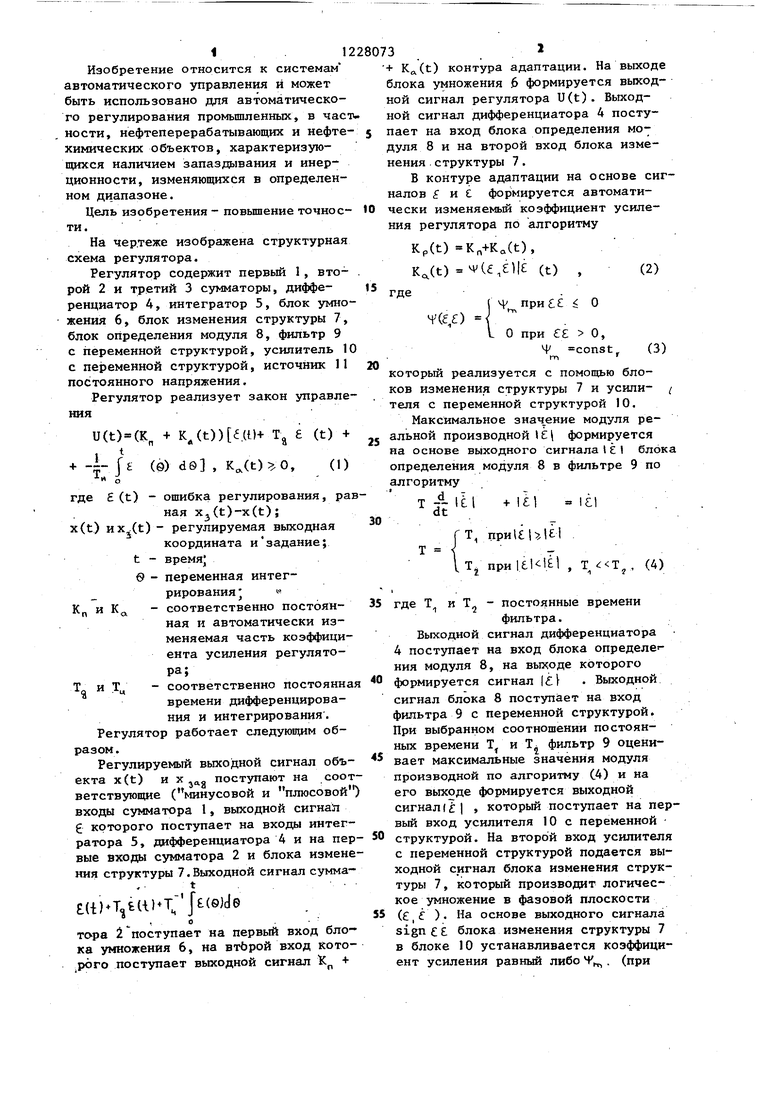
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU631869A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Регулятор с размытой логикой | 1988 |
|
SU1587466A1 |
| Адаптивный регулятор | 1978 |
|
SU717718A1 |
| Адаптивный пневматический регулятор | 1977 |
|
SU661505A1 |
Изобретение относится к области систем управления, а именно к системам с переменной структурой. Изобретение позволяет за счет введения усилителя с переменной структурой обеспечить адаптивное регулирование, обеспечивающее увеличение точности в случае, когда параметры объекта существенно изменяются. 1 ил. (Л IN9 1C 00 vj 00
Редактор К.Волощук
Составитель В.Кузин Техред И.Попович
Заказ 2286/48Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 1J3035, Москва, Ж-35, Раушская наб., д. 4/5
-.«-и.-.«----- --- «---. - -- ---«---- «----- ---- -- ™ - -- ™
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор А.Зимокосов
| Алиев Р.А., Джафаров С.М., Зейналов М.Ф | |||
| Адаптивный регулятор для регулирования температуры реактора процесса двухступенчатого каталитического крекинга | |||
| - Известия вузов | |||
| Нефть и газ, 1981, № 6, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
