1
(21)4362854/24 (22)11.01.88 (46)07.12.91. Бюл. №45
(71)Институт проблем управления
(72)С. В. Емельянов, М. 3. Шовкун, А. М. Шубладзе, Ю. А. Голубев, В А. Лобанов и А. Е. Торопов
(53) 62-50 (083.8)
(56) Авторское свидетельство СССР
№ 802928, кл. G 05 В 13/02, 1981.
Авторское свидетельство СССР № 1149213, кл. G 05 В 13/02, 1985.
Шубладзе А. М. Способы систем управления максимальной степени устойчивости, Автоматика и телемеханика, № 1, 1980.
(54) БИНАРНАЯ СИСТЕМА УПРАВЛЕНИЯ (57) Изобретение относится к автоматическому регулированию и может быть использовано в системах управления технологическими процессами с переменными параметрами. Бинарная система управления позволяет существенно расширить функциональные возможности регулятора и обеспечить требуемую точность регулирования в условиях существенным образом изменяющихся гистерезисных характеристик астатического объекта регулирования. Для этого система содержит за- датчики 2-5, сумматоры 8-11, шим-моду- лятор 17, инерционный 18 и дифференцирующий 19 фильтры, нуль-органы 20 и 21, од- новибраторы 22 и 23, интегратор 16. 1 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления энергетическим комплексом | 1982 |
|
SU1128220A1 |
| Следящая система для инерционного объекта | 1984 |
|
SU1232939A1 |
| Адаптивный регулятор | 1984 |
|
SU1149213A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| Способ управления энергетическим комплексом | 2021 |
|
RU2768498C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| Адаптивная система управления процессом стерилизации | 1985 |
|
SU1332261A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Двухканальная система управления | 1989 |
|
SU1656496A1 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
Изобретение относится к автоматическому регулированию и может быть использовано в системах управления технологическими процессами с переменными параметрами, например, в системах управления процессами бурения.
Цель изобретения - обеспечение возможности управления астатическим объектом с нестационарными гистеоезисными характеристиками.
Сущность настоящего предложения состоит в том, что вводятся два канала управления, один из которых, реализованный с помощью шип-модулятора, обеспечивает качество и устойчивость процесса управления при фиксированном положении гисте- резисной характеристики объекта, а второй контур, реализованный с помощью интегратора, обеспечивает адаптивные свойства
системы в случае изменения параметров ги- стерезисного элемента объекта регулирования.
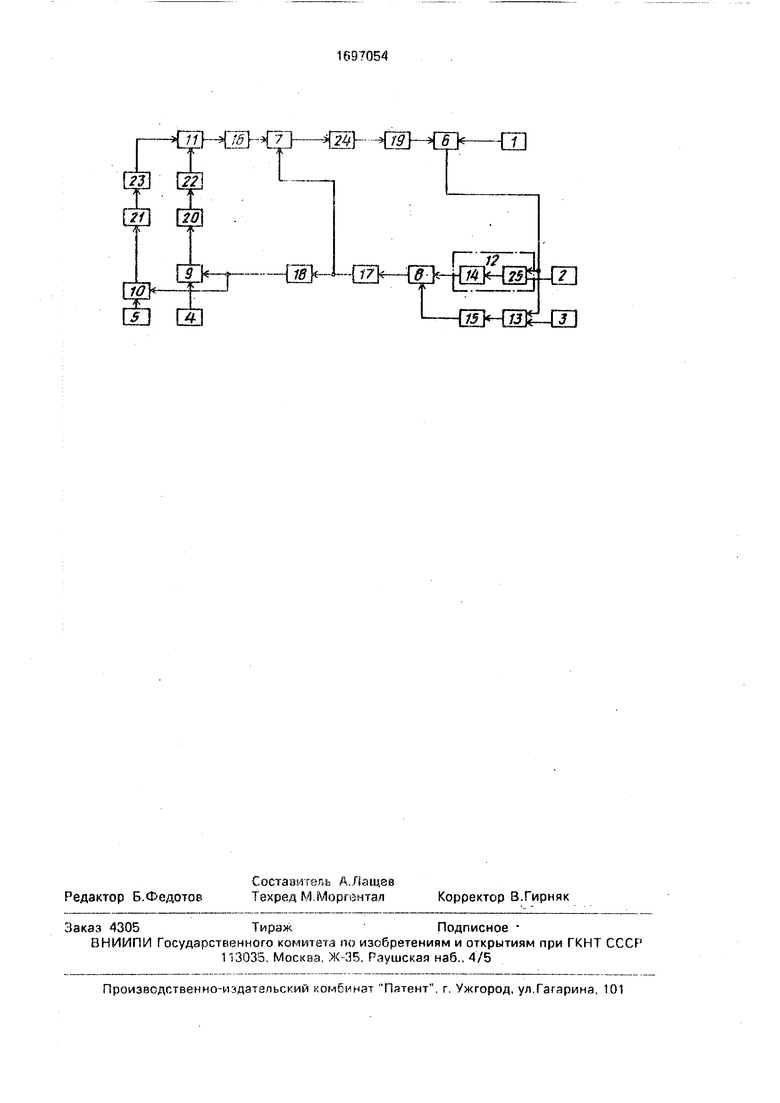
На чертеже приведена функциональная схема системы управления.
Система содержит задатчики 1-5, сумматоры 6-11, множительные устройства 12 и 13, усилитель 14, интеграторы 15 и 16, шим-модулятор 17, инерционный фильтр 18, дифференцирующий фильтр 19, нуль-орган 20 и 21, одновибраторы 22 и 23. Объект регулирования обозначен поз. 24, множительное устройство 12 состоит из умножителя 25 и усилителя 14.
Выход задатчика 1 и выход дифференцирующего фильтра 19, входом которого является выход объекта 24 регулирования, соединены с входами сумматора б, выход которого соединен с первыми входами мноО
о -ч о ел
жительных устройств 12 и 13. Выходы задатчиков 2 и 3 соединены с вторыми входами соответственно множительных устройств 12 и 13, выходы которых соответственно через усилитель 14 и интегратор 15 подклю- чены к сходам сумматора 8. Выход сумматора 8 через шим-модулятор 17 и инерционный фильтр 18 соединены с первыми входами сумматоров 9 и 10. Выходы задатчиков 4 и 5 соединены с вторыми вхо- дами соответственно сумматоров 9 и 10. Выход сумматора 9 через нуль-орган 20 и одновибратор 22 подключен к первому входу сумматора 11. Выход сумматора 10 через нуль-орган21 и одновибратор 23 подключен к второму входу сумматора 11. Выход сумматора 11 через интегратор 16 подключен к первому входу сумматора 7, второй вход которого соединен с выходом шим-модуля- тора 17. Выход сумматора 7 подключен к входу объекта 24 регулирования.
Адаптивный регулятор предназначен для управления нелинейными объектами, где линейная часть описывается передаточной функцией вида: -Pf
шg
™L P(TP+1)
а гистерезмсный элемент - следующей системой уравнений:
Uc
где Кг - угол наклона петли гистерезиса;
11 - зона нечувствительности мзменяю- щейся во времени петли гистерезиса;40
д - параметр, характеризующий ширину петли гистерезиса;
1)2 входной сигнал гистерезисного элемента:,
ц. J+Uj+Ul g-M.45
где Тф - постоянная времени фильтра шим- модулятора;
Кф - коэффициент усиления фильтра шим-модулятора;50
Ui - входной сигнал шим-модулятора;
в- скважность выходного сигнала шим- модулятора:
М - уровень выходного сигнала релейного элемента шим-модулятора;55
Uo выходной сигнал гистерезисного элемента
U0 (M-I- д) Кг в.
При равенстве знаменателей передаточных функций фильтра шим-модулятора и
дифференцирующего фильтра передаточная функция регулятора
Wy Тд Кп Р 4- Ки
КФР
где Тд - коэффициент усиления дифференцирующего фильтра;
Кп - коэффициент при пропорциональной составляющей закона регулирования;
Ки - коэффициент при интегральной составляющей.
Тогда передаточная функция замкнутой системы
WB тд KQ (кп Р +ХИ)
pt
(т Р -И) Р е + тд Ко (кп Р + Ки)
где Ko (M-I- 5) Кг - коэффициент усиления объекта.
Значения коэффициентов Кп и Ки оптимальным образом выбирают по максимальной степени устойчивости, которая достигается при следующих значениях коэффициентов
-П
Т()-1г +1
- Ј
ПЈ
(-тТ-м)-1-Ко -кп
Ко
5
0
5
0
5
I--У2 . 1 .2 1
1lT2+4T2-fT+2T
которые реализуются в предлагаемом устройстве.
Система работает следующим образом. Регулятор состоит из двух контуров регули-. рования. Первый контур регулирования, состоящий из задатчиков 1-3, сумматоров 6-8, множительных устройств 12 и 13, усилителя 14, интегратора 15 и. шим-модулятора 17, лианезирует гистерезисный элемент объекта регулирования. По сигналу ошибки регулирования, получаемой на выходе сумматора б, как разности сигналов за датчика 1 и дифференцирующего фильтра 19, состоящего на выходе объекта регулирования, на выходе усилителя 14 формируется сигнал пропорциональной составляющей закона регулирования, а на выходе интегратора 15 - сигнал интегральной составляющей. Сумма этих сигналов с сумматора 8 подается на вход шим-модулятора 17. Множительные устройства 12 и 13 используются для ввода в контур регулирования коэффициентов пропорциональной и интегральной составляющих, представляющих собой произведение сигналов ошибки регулирования и коэффициентов пропорциональной и интегральной составляющих, поступающих соответственно с задатчиков 2, 3.
Второй контур регулирования, состоя- щий из инерционного фильтра 18, задатчиков 4 и 5, сумматоров 9-11, нуль-органов 20 и 21, одновибраторов 22, 23 и интегратора 16, стабилизирует изменяющиеся во времени параметры гистерезисного элемента объекта регулирования. Выходной сигнал шим-модулятора, реализующего формулу (1), поступает на второй вход сумматора 7 и через инерционный фильтр 18 - на первые входы сумматоров 9 и 10. Выходной сигнал . сумматора 9, представляющий собой разность сигналов за датчика 4 и инерционного фильтра 18, поступает на вход нуль-органа
16, подается на объект регулирования.
Формула изобретения
Бинарная система управления, содержащая первый задатчик, подключенный к нему суммирующим входом первый блок сравнения, первое множительное устройство, последовательно соединенные второе множительное устройство и первый интегратор, выход блока сравнения подключен к первым входам первого и второго множительных устройств, и первый сумматор, выход которого подключен к входу объекта регулирования, отличающаяся тем, что с целью повышения точности в условиях существенным образом изменяющихся гисте- резисных характеристик астатического объекта регулирования, она дополнительно содержит шим-модулятор, инерционный и дифференцирующий фильтры, второй, третий, четвертый и пятый задатчики, второй и третий сумматоры, второй и третий блоки сравнения, первый и второй нуль-органы, первый и второй одновибраторы, второй ин- тегратср, причем выходы второго и третьего задатчиков подключены к вторым входам соответственно первого и второго множительных устройств, входы второго сумматора подключены к выходам соответственно первого множительного устройства и первого интегратора, шим-модулятор и инерционный фильтр соединены последовательно, вход шим-модулятора подключен к выходу второго сумматора, а выход инерционного фильтра - к вычитающим входам второго и третьего блоков сравнения, к суммирующим входам которых подключены выходы соответственно четвертого и пятого задатчиков, первый нуль-орган и первый одновибратор соединены последовательно, вход первого нуль-органа подключен к выходу второго блока сравнения, а выход первого одно- вибратора - к первому входу третьего сумматора, второй нуль-орган и второй одновибратор соединены последовательно, вход второго нуль-органа подключен к выходу третьего блока сравнения, а выход второго одновибратора - к второму входу третьего сумматора, вход второго интегратора соединен с выходом третьего сумматора, а выход - с первым входом первого сумматора, второй вход которого подключен к выходу шим-модулятора, вход дифференцирующего фильтра подключен к выходу объекта регулирования, а выход - к вычитающему входу первого блока сравнения.
