1
Изоб(ретение относится к устройствам, применяемым для предохранения рельсовых грузоподъемных кранов от угона вет:ром при работена открытых площадках.
Известны противоугонные захваты, содержащие связанный со штоками электрогидротолкателя полый грузовой клин, взаимодействующий с роликами зажимных рычагов, фиксирующее .клин устройство с электромагнитным Приводом и механизмом ручного привода.
Цель и-зобретения - повысить надежность и упростить конструкцию противоугонного захвата.
Это достигается тем, что механизм ручного дублирования работы выполнен в виде смонтированного внутри клина винтового домкрата, кинематкческн связанного с шарнирносмонтированными в продольных пазах «липа профильными направляющими, взаимодействующими с роликами зажимных рычагов.
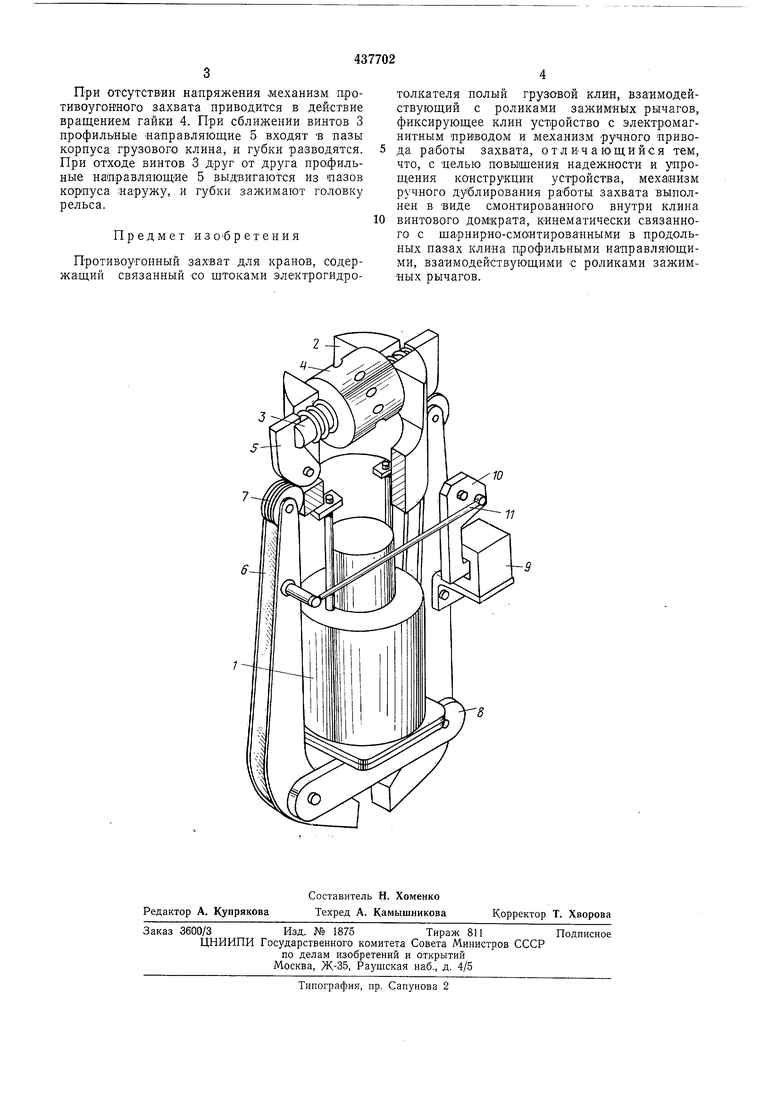
На чертеже изображен противоугонный захват в аксонометрия.
Толкатель 1 (например, элект:рогидравлический, двух1штоковый) крепится к раме захвата. На его щтоках закреплен нолый корпус грузового клина 2, имеющий два вертикальных паза « одно горизонтально-расположенное цилиндрическое отверстие, которое является .направляющим для двух винтов 3 с левой и правой нарезками, образующих совместно с гайкой 4 винтовой домкрат. Винты имеют пазы, совмещаемые при сборке с вертикальными пазами корпуса грузового клина. В ве:ртикальные пазы корпуса грузового клкна
и пазы винтов входят шарнирно-сочлененные с корпусом грузового клина профильные направляющие 5 с двойными углами заострения относительно продольной и поперечной осей. В гайке домкрата выполнены радиальные отверстия для рычажной рукоятки, используемые для вращения гайки. Рычаги 6 с роликами 7 связаны шарнирно между собой сергами 8 и снабжены губками для захвата головки рельса; на одном из рычагов закреплён электромагнит 9 с сердечником 10, второй рычаг соединен с сердечником электромагнита шарнирно посредством тяги М.
Включение толкателя и электромагнита производится одновременно.
Нри подъеме грузового клина 2 ролики 7 поджимаются к профильным направляющим 5 под действием веса сердечника 10 и усилия электромагнита 9, а губки отводятся от головки рельса. В конце подъема толкатель 1
отключается, а грузовой клин 2 фиксируется на углах заострения относительно поперечной оси. При отключении электромагнита 9 (вручную, автоматически или снятием напряжения) грузовой клин 2 начинает опускаться
и, разводя рычаги 6, зажимает губками голову рельса.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| Стенд для испытания противоугонных захватов | 1972 |
|
SU450986A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 1968 |
|
SU221927A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1972 |
|
SU360311A1 |
| Противоугонный рельсовый захват | 1983 |
|
SU1191417A1 |
| Автоматический противоугонный захват | 1981 |
|
SU979258A1 |
| МОБИЛЬНАЯ ВОЛНОВОДНАЯ АНТЕННАЯ РЕШЕТКА | 1983 |
|
SU1840020A1 |
| Противоугонный рельсовый захват | 1983 |
|
SU1209577A1 |
| Противоугонный клещевой захват для кранов | 1985 |
|
SU1331802A1 |
