Известны противоугонные захваты для кранов, содержащие поворотные рычаги. На нижних концах этих рычагов закреплены зажимные губки, а на верхних - шарнирные секторы, взаимодействующие с ведущим звеном приводного механизма.
В прсдлолсенном захвате для повышения надежности его работы губки шарнирно соединены с криволинейными кулачками, перемещающимися но опорным поверхностям корпуса губок и связанными с упорными рычагами, соединенными при помощи пальца с системой рычагов.
Рычаги поворотны с помощью тяги, обеспечивающей при этом приведение губок в исходное положение.
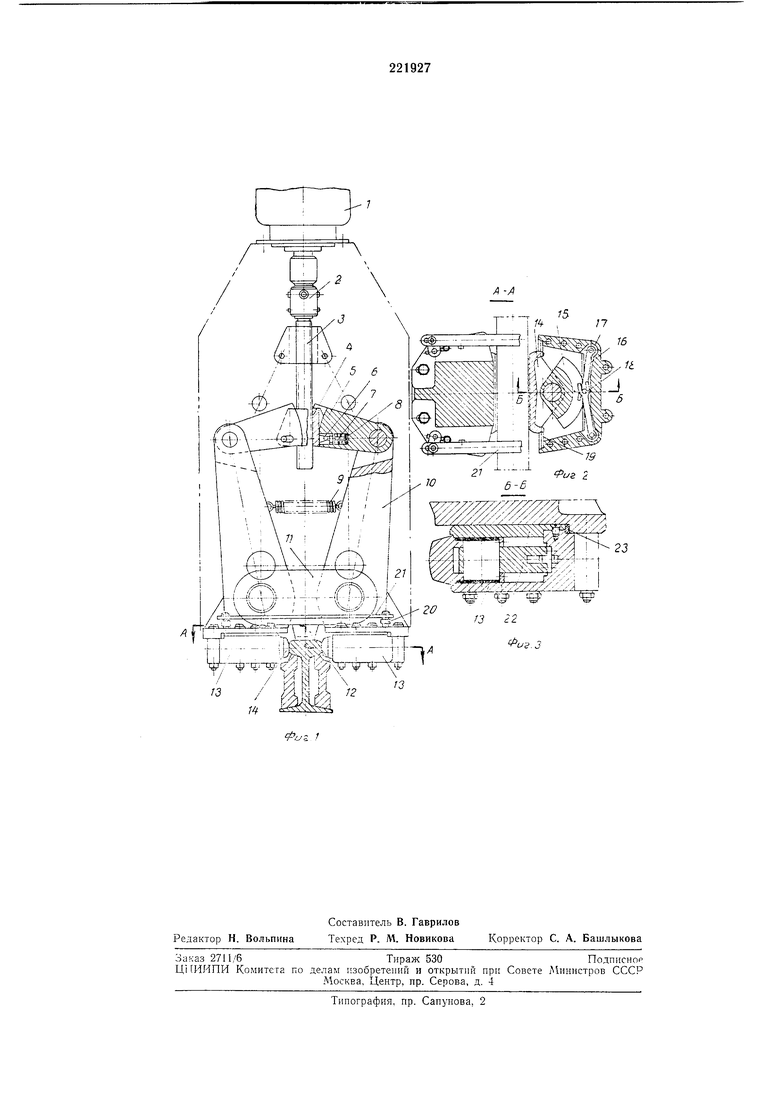
На фиг. 1 изображен описываемый захват, общий вид; на фиг. 2 - разрез но Л-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 2.
Для осуществления движения элементов захвата в процессе замыкания или размыкания его и создания первоначального поджатия к рельсу служит двигатель /, который через шарнирную муфту 2 соединен с ходовым винтом 3. На винте расположена приводная гайка 4, имеющая боковые направляющие и паз, по которому перекатывается своей цилиндрической частью сектор 5. В боковых направляющих гайки находится палец 6, служащий для соединения ее с сектором. В секторе палец располагается в фигурном пазе, благодаря которому при замкнутом захвате гайка может перемещаться на путь, необходимый для срабатывания конечного выключателя (конечные выключатели на чертеже не показаны). Палец 6 также служит для поворота сектора в нерабочее положение и подъема устройства при размыкании захвата во время движения гайки вверх.
На цилиндрической поверхности сектора расположено сверление, в котором находится толкатель 7, имеющий ограниченное иеремещение, и 8.
Толкатель с пружиной служат для компенсации зазоров в соединениях и для обеспечения надежного замыкания элементов при начале захвата головки рельса.
Пружина 8 развивает большее усилие, чем пружина 9, сближающая рычаги 10 в период размыкания захвата. Рычаги 10 служат для передачи движения и усил1;й на зажимной орган.
Рычаги соединены между собой щеками //, снабженными упором 12 для ограничения движения захвата вниз и ориентации его относительно головки рельса в вертикальной плоскости.
кулачком 15. Этот кулачок криволинейной поверхностью опирается на стенку корпуса и перекатывается по ней (при смещении губок) без скольжения. Это обеспечивают два упорных рычага 16. попеременно включающиеся в работу в зависимости от направления сдвига губок. Упорные рычаги размещены в углублении стенхй коопуса и проточке кулачка. Они вра11;. I-I2 осях /7 и своей вилкой соединены с пальцем 18, жестко связанным с кулачком /5. Положение оси 17 выбрано в заBHCKJ.iocTx от профиля кулзчка п движения пальца 18 по о:.руж:юсти, что и обеспечивает перекатывание кулачка без скольжения.
Для предохранения корпуса 13 от попадания пьЛк я Елагк губки 14 снабжены пружинящими: :лест1-:иамм 19.
На вь-ступающих ЕЗ корпуса концах осей 17 жестко насажены рычаги 2G блокировочного устройства, служатдего для возврата кулачков и губок 3 исходное положение при размыкании захвата. На концах рычагов 20 меются пальцы, помецтенные в пазах тяг 21. Положение и длиЕа пазоз тяг 21 рассч -;та ;ы исходя из условия Еоздействпя стенки паза па упорные рычаг;-: 18 lojbxo в период окончания разжатия рычагов 10. Корпус 13 зажимного устройства имеет крышки 23. Для регулировки положения губок по щирине головки рельса и компенсации возможных неточностей служат прокладки 23 и пазы в нижней части рычагов под крепящие корпус болты.
Во время работы крана рельсовый захват отключен, гайка 4 находится в верхнем положении {на чертеже показано тонкими линиями), верхние концы рычагов 10 сведены, зажимное устройство разведено и поднято над головкой рельса.
При включении двигателя гфащение через муфту 2 передается винту 3 и гайка 4 перемещается вниз. Сектор 5 под действием оси опускает рычаги 10 до соприкосновения упора 12 Щгк 11 с головкой рельса и разводит их, преодолевая сопротивление пружины 9, до соприкосновения губок 14 с рельсом. При эточм точка контакта цилиндрической части сектора 5 и прорези гайки 4 с верхней осью рычага 10 образует прямую линию, что обеспечивает замыкание захвата. Это положение сохраняется при дальнейшем гайки 4, необходимом для отключения двигателя. В таком положении прижим губок 14 к головке рельса осуществляется толкателем 7 и пружиной 8.
При движении крана под действием силы угопа происходит смещение корнуса 13 относительно губок 14 и перекатывание кулачка 15
ио опорной поверхности. Палец 18 кулачка при этом постояпно упирается в один из упорных рычагов 16, двигаясь по окружпости. Это определяет движение кулачка без скольжения, и величина подъема его поэтому рассчитывается, исходя из величины силы сцепления губок с головкой рельса. Губки 14 смещаются до гех пор, пока усилие угопа крана пе будет уравновещено силой зажатия губками головки рельса.
Для выключения захвата двигатель включается на подъем гайки. В начале движения гайки происходит отход корпуса 13 с крышкой 22, в конце которого пальцы рычагов 20, упираясь в стенки прорези тяги 21, поворачивают
ось 17 и рычаги 16, воздействующие своей вилкой на палец 18. В результате этого кулачок и губки возвращаются в нейтральное положение, а пружинящая пластина 19 закрывает корпус. При дальнейшем движении гайки рычаги и зажимное устройство поднимаются в верхнее положение.
Предмет изобретения
Противоугонный захват для кранов, содержащий поворотные рычаги, несущие на нижних концах зажимные губки, а на верхних - гаарпирные секторы, взаимодействующие с ведущим звеном приводного механизма, отличающийся тем, что, с целью повышения надежности работы захвата, губки шарнирно соединены с криволинейными кулачками, перемещающимися по опорным поверхностям корпуса губок и связаппыми с упорными рычагами, соединенными при помощи пальца с системой рычагов, поворотной с помощью тяги, обеспечивающей при этом приведение губок в исходное положение.
All I
I
(,/:
I/ K-i iy .-: ч
И 1 И
Мй
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Автомат для подготовки проводов к монтажу | 1987 |
|
SU1457041A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1328138A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Инструмент для удаления изоляции с концов электрических проводов | 1985 |
|
SU1309143A1 |
| ПЕРЕДВИЖНОЕ УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ДЛИННОМЕРНЫХ ПЛЕТЕЙ СКРЕПЛЕНИЯМИ ТИПА ЖБР ПРИ ЗАМЕНЕ ИНВЕНТАРНЫХ РЕЛЬСОВ | 2008 |
|
RU2385376C1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |