(54) АВТОМАТИЧЕСКИЙ ПРОТИВОУГОННЫЙ ЗАХВАТ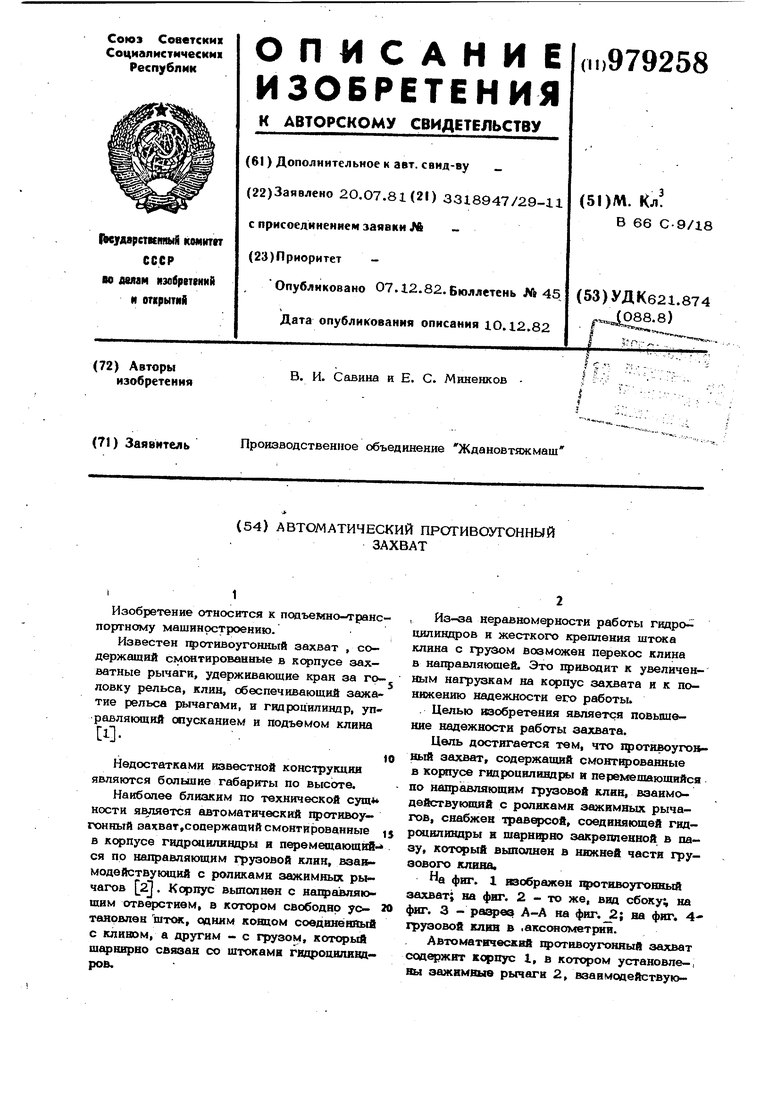
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1972 |
|
SU360311A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Противоугонный захват для кранов | 1972 |
|
SU437702A1 |
| Автоматический клиновой противоугонный захват | 1981 |
|
SU979259A1 |
| АВТОМАТИЧЕСКИЙ ПРОТИВОУГОННЫЙ ЗАХВАТ для ГРУЗОПОДЪЕМНЫХ КРАНОВ НА РЕЛЬСОВОМ ХОДУ | 1973 |
|
SU389000A1 |
| Автоматизированный склад | 1980 |
|
SU992344A1 |
| Противоугонный рельсовый захват крана | 1990 |
|
SU1773850A1 |
| Противоугонный автоматический клещевой захват для кранов | 1974 |
|
SU522125A1 |
| ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ТРУБ В ВЕРТИКАЛЬНОМПОЛОЖЕНИИ | 1971 |
|
SU308965A1 |
| Гидравлический подъемник для приемапередачи груза с канатной дороги | 1972 |
|
SU483340A1 |
i1
Изобретение относится к подъемно-транспортному машиностроению.
Известен гфотивоугонный захват , содержащий смонтированные в корпусе захватные рычаги, удерживающие кран за головку рельса, клин, обеспечивающий зажатие рельса рычагами, и гнароцилиндр, управляющий опусканием и подъемом клина 1.
Недостатками известной конструкции являются большие габариты по высоте.
Наиболее близким по технической сущ ности является автоматический щ отивоу гонный захват,со0ержащий смонтированные 5 в корпусе гидроцилиндры н перемещающий ся по направляющим грузовой клин, взаимодействующий с роликами зажимных рычагов 2J. Корпус вьшопнен с нахфавлжощим отверстием, а котором свободно уо- 20 танрвлен шток, одним концом соединёвяый с клином, а другим - с грузом, который ш фщфно связан со штоками гвдрошшвццров.
, Из-за неравномерности работы гидроцилиндров и жесткого крепления штока клина с грузом возможен перекос клина в натравляющей. Это хфиводит к увеличенным нагрузкам на корпус захвата и к понижению надежности его работы.
. Целью изобретения является повышение надежности работы захвата.
Цель достигается тем, что щзотивоуго ный захват, содержащий смонтщ)оваш1ые
10 в корпусе гидроцилиндры и перемещающийся по направляющим грузовой клин, взаимодействующий с роликами зажимных рычагов, снабжен , соединяющей гидрсшЕлиндры в шарнфно закрепленной в пазу, который выполнен в нижней части грузового клина.
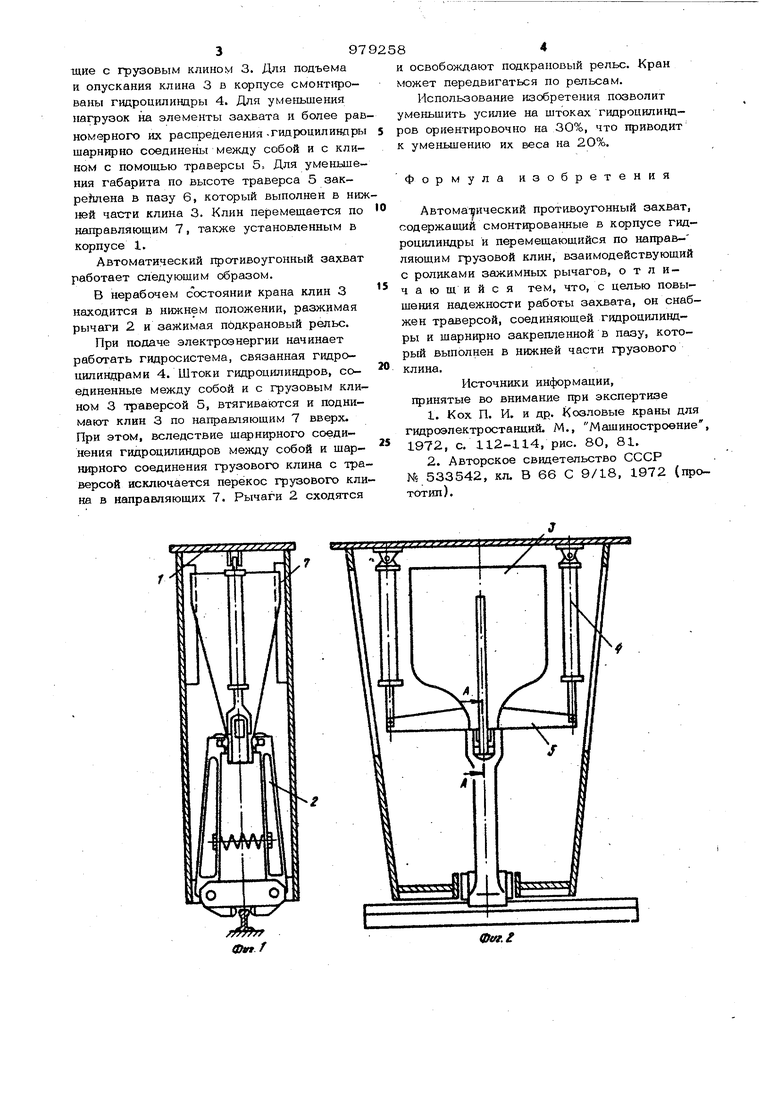
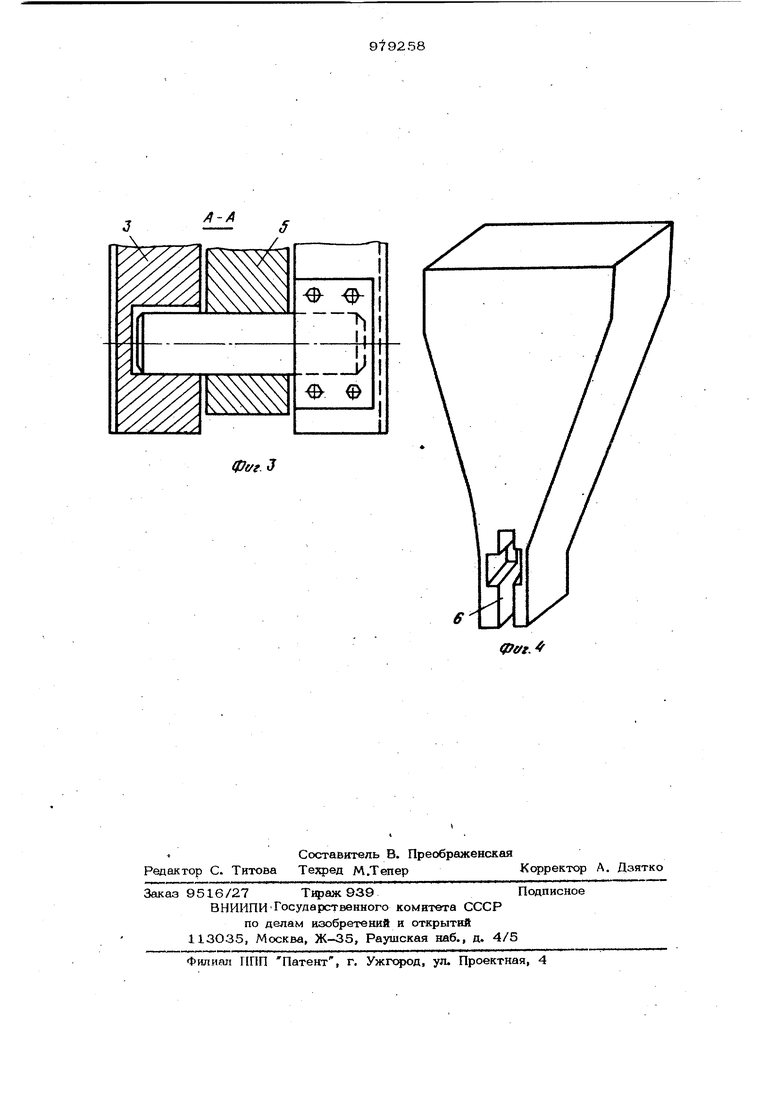
а фиг. 1 изображен хфотивоугонный захват; на фиг. 2 - то же, ввд сбоку; на фиг. 3 - раэрез А-А на фиг.J2; на фиг. 4грузовой клин в .аксонометрии.
Автоматнческнй 1фотивоугош1ый захват содержит корпус 1, в котором установле-, вы зажимные рычаги 2, взаимсаействующие с грузовым клином 3. Для подъема и опускания клина 3 в корпусе смонтированы гидроцилиндры 4. Для умеш шения нагрузок на элементы захвата и более рав номерного их распределения.гидроцилиндры шарнирно соединены между собой и с клином с помощью траверсы 5 Для уменьшения габарита по высоте траверса 5 закрейлена в пазу 6, который выполнен в ниж ней части клина 3. Клин перемещается по направляющим 7, также установленным в корпусе 1. Автоматический противоугонный захват работает следующим образом. В нерабочем состоянии крана клин 3 находится в нижнем положении, разжимая рычаги 2 и зажимая пбдкрановый рельс. При подаче электроэнергии начинает работать гидросистема, связанная гидроцилиндрами 4. Штоки гидроцилиндров, соединенные между собой и с грузовым клином 3 траверсой 5, втягиваются и поднимают клин 3 по направляющим 7 вверх. При этом, вследствие щарнирного соединения гидроцилиндров между собой и щарнирного соединения грузового клина с траверсой исключается перекос грузового клина в направляющих 7. Рычаги 2 сходятся И освобождают подкрановый рельс. Кран может передвигаться по рельсам. Использование изобретения позволит уменьщить усилие на щтоках гидроцилиндров ориентировочно на 30%, что приводит к уменьшению их веса на 2О%. Формула изобретения Автома- ический противоугонный захват, содержащий смонтированные в корпусе гидроцилиндры и перемещающийся по направ- ляющим грузовой клин, взаимодействующий с роликами зажимных рычагов, отличающийся тем, что, с целью повышения надежности работы захвата, он снабжен траверсой, соединяющей гидроцилиндры и щарнирно закрепленной в пазу, который выполнен в нижней части грузового клина. Источники информации, принятые во внимание при экспертизе 1.Кох П. И. и др. Козловые краны для гидроэлектростанций. М., Мащиностровние, 1972, с. 112-114, рис. 80, 81. 2.Авторское свидетельство СССР № 533542, кл. В 66 С 9/18, 1972 (прототип).
Фе/г.
